基于无线传感器网络的气体泄漏源定位机器人设计*
2015-03-26吴怀宇王永骥
程 磊,张 东,刘 波,吴怀宇,王永骥
(1.武汉科技大学 冶金自动化与检测技术教育部工程研究中心,湖北 武汉430081;2.华中科技大学 自动化学院,湖北 武汉430074)
0 引 言
机器人主动嗅觉技术就是模仿生物的嗅觉功能,设计主动嗅觉系统[1],使机器人能够自主发现烟羽,跟踪烟羽,最终确定气味源的位置。在军事、安防、工业等领域,机器人主动嗅觉技术可以用来寻找爆炸源、有毒气体泄漏源、其它危险气源的具体位置等[2],且机器人具有工作时间长、开发迅速、能够完成高危作业,因此,基于移动机器人的气体泄漏源定位技术具有广阔的前景。
早在20 世纪80 年代,国外的科研人员已经开始主动嗅觉技术方面的研究[3]。1991 年,Rozas 开发出电子鼻,并把其安装到移动机器人身上来进行气味源的跟踪和定位。1998 年,澳大利亚的Russell R A[4]开发出机器蚂蚁,在机器蚂蚁的头部安装了一对传感器作为触角,并设计气味源定位算法进行实验。2002 年,Hayes A T 对机器人气味源定位技术进行了定义[5],并对其分解为3 个任务:发现烟羽、跟踪烟羽、气味源确认[6]。而早期从事主动嗅觉研究的学者主要涉及的是烟羽跟踪和气味源确认的问题[7,8],很少涉及到烟羽发现问题,因此,需要机器人随机搜索发现烟羽,从而导致气味源定位效率低。
本文围绕室内移动机器人危险气体泄漏源定位问题,设计出移动嗅觉机器人硬件系统,并将Z 字形算法[9]和浓度梯度算法[10]相结合来解决气味源定位效率不高的问题,使移动嗅觉机器人可以自主、高效寻找到气味源。最后结合无线传感器网络(WSNs)技术,使操作人员在室外PC 上即可得到泄漏源的坐标。
1 移动嗅觉机器人硬件系统
移动嗅觉机器人系统结构如图1,该系统由DSP+CPLD 核心控制模块、电机控制与驱动模块、气体传感器阵列(4 只TGS620 气体传感器组成气体传感器阵列)、红外避障模块(GP2D12 红外传感器阵列)、无线传感器定位系统(CC2530 定位系统)组成。气体传感器模块感知气味信息,通过信号处理和模式识别后传递信号给DSP 从而控制直流电机的前进方向,使机器人跟踪烟羽。红外传感器检测到障碍物后通过信号处理和模式识别传递电压信号给DSP 从而控制机器人运动,使其避开障碍物。利用CC2530 定位系统可以确定移动机器人的具体位置,当机器人找到气味源停止运动后,机器人把检测信息发送给网关,通过网关传送到电脑,在电脑上运行专用软件LocDemo.exe,就可以显示移动节点相对于参考节点的坐标值,从而得到机器人的具体位置,实现定位功能。

图1 移动嗅觉机器人系统结构Fig 1 System architecture of mobile olfaction robot
移动嗅觉机器人有两个主动轮和一个从动轮,两个主动轮采用直流电机控制,LMD18200 作为直流电机的驱动芯片,控制电路图如图2 所示。如图DSP 通过检测气味传感器的信号后,传出TP5,脉冲宽度调制(PWM)信号送给LMD18200,分别控制直流电机的正反转和转速。电机的转速同时通过光电编码器反馈给DSP 从而形成闭环控制,DSP 内部采用PID 算法进行转速的调整从而精确控制电机转动。
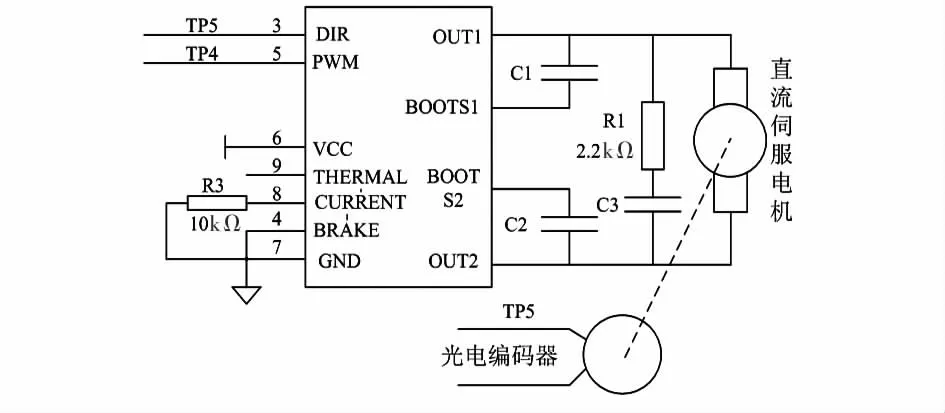
图2 电机驱动电路图Fig 2 Circuit of motor drive
2 移动机器人气味源定位算法与仿真
图3 为Z 字形搜索策略与浓度梯度法相结合算法的定位策略流程图,该方法将整个气味源定位过程分解为全局搜索和局部搜索。首先机器人进行全局搜索(Z 字形遍历)快速发现烟羽,发现烟羽后全局搜索结束,机器人开始调用局部搜索策略(基于传感器阵列的浓度梯度法),使移动机器人能够朝着气味浓度高的方向移动,从而可以跟踪烟羽,当气味浓度达到阈值时,认为机器人找到气味源。
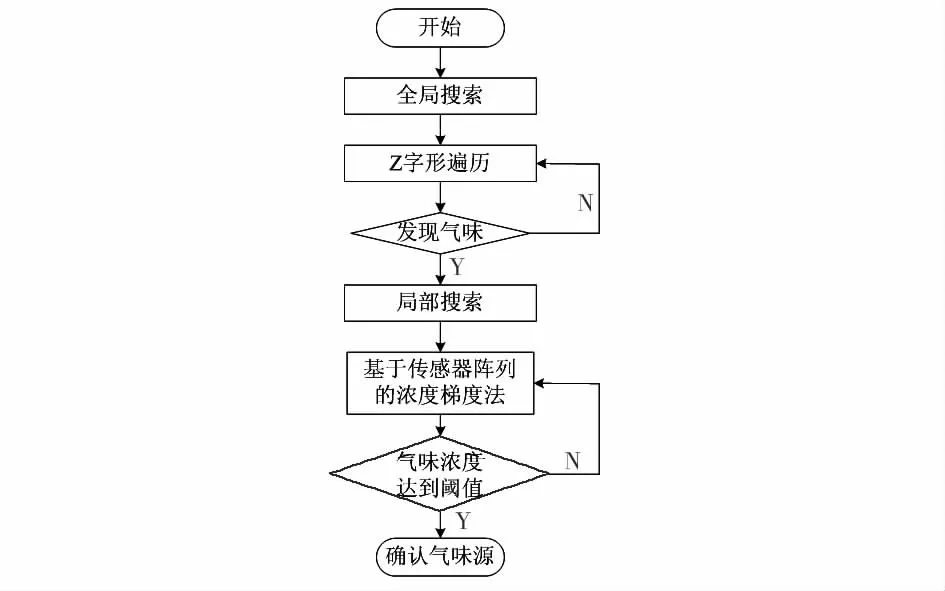
图3 定位策略Fig 3 Strategy of localization
基于传感器阵列的浓度梯度法是根据浓度梯度法改进而来。设计移动机器车如下图4 所示,移动机器车身上安装有4 只气味传感器,用来采集当前的浓度信息。设置机器人前进的步长设为L,机器人每步的偏移角度由4 只气体传感器测得的最大值确定。基于传感器阵列的浓度梯度法规则如下:当A 传感器测得的气体浓度值最大时,则机器人直走L;当B 传感器测得的气体浓度值最大时,则机器人右转α,并前进L;当C 传感器测得的浓度值最大时,则机器人右转2α,并前进L;当D 传感器测得的气体浓度值最大时,则机器人左转α,并前进L。按照此规则重复检测传感器的最大值确定机器人偏移角度,从而使机器人沿着气味浓度高的方向移动。
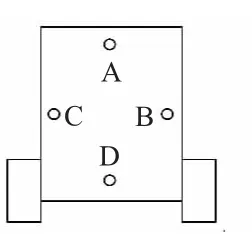
图4 机器人模型Fig 4 Model of robot
移动机器人气味源定位程序流程如图5 所示,首先初始化DSP2407,设置寄存器ACTRA=0x0111,波特率设置为9600 波特,SPI 上升沿输出数据,下降沿输入数据。然后调用Z 字形遍历程序,使机器人全局搜索烟羽,当发现气味后气味传感器检测到的信号产生中断。此时机器人开始调用局部搜索程序,使用while(1){};语句一直查询4 只气体传感器的值,通过改变电机控制程序的直流电机PWM 值使机器人沿着气味浓度高的方向运动。当传感器的值超过阈值时则认为找到气味源。
研究有毒气体泄漏后的扩散规律,设计出高效的气味源定位算法,对移动机器人高效定位气味源具有重要意义。由于高斯气体扩散模型中湍流是各向均匀且同性的,风速恒定且适用与泄露源的连续扩散,满足气源定位的模拟环境,因此,气源搜索与定位就建立在高斯烟羽扩散模型下。设置泄漏源的坐标为(x,y,z);C(x,y,z,H)为坐标点(x,y,z)的烟羽浓度值,kg/m3;k 为沿x 轴方向的平均风速,m/s;Q 为泄漏源的强度;σz,σy分别为垂直扩散参数和水平扩散参数;H 为泄漏源的高度,m;高斯气体扩散方程[10]为

图5 移动机器人气味源定位程序流程图Fig 5 Flowchart of odor source localization program by mobile robot

仿真环境设计为长为100 m,宽为20 m,(0,-5)m 为气体泄漏源,气体按照高斯等值线模型扩散,机器人的起始位置为(0.5,100)m。机器人首先进行全局搜索来发现烟羽,全局搜索使用Z 字形算法。机器人用质点表示,行走轨迹如图6 所示。当机器人行走到坐标(58,-8.5)m 时发现烟羽。此时机器人调用局部搜索算法,机器人跟踪烟羽并朝着气味浓度高的方向移动,直到机器人周围四点中的一点的浓度值达到阈值则认这一点为气味源。

图6 嗅觉机器人定位策略仿真图Fig 6 Simulation diagram of localization strategy of olfaction robot
3 实验结果
在实验室内简单封闭环境中,为了试验人员安全,以酒精作为泄漏气体,放在稳定风场下,气体扩散成浓度梯度模式。由于酒精扩散很慢,在杯子里面和杯子表面都涂有酒精,并在实验环境四周放置4 个CC2530 固定参考节点,实验环境如图7 所示。
等到酒精扩散后,把移动机器人放入实验环境中。实验过程如图8 所示,机器人首先进行Z 字形搜索发现烟羽,然后调用基于传感器阵列的浓度梯度法进行局部搜索跟踪烟羽。最后,当气味传感器的浓度值达到阈值并且红外传感器检测到障碍物则机器人停止运动,找到气味源。

图7 实验环境Fig 7 Experimental environment
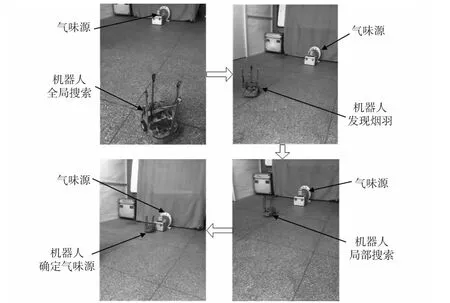
图8 实验过程Fig 8 Experimental process
机器人找到气味源后,运行无线传感器网络套件模块,设置好串口和固定节点坐标后通过定位可以在电脑上得到机器人的具体位置,机器人坐标信息如图9 所示。图中A代表移动机器人的位置,1~4 代表4 个固定参考节点,实验环境中固定参考节点的顺序和位置和软件上4 个点的位置要相对应。图上得到的坐标是机器人的相对位置,以参考节点4 为坐标原点,节点4 和节点1 构成的线为x 轴,节点4 和节点3 构成的线为y 轴。由图得到机器人的坐标为(2.27,3.31)m,因为实验环境中固定参考节点的顺序和位置和软件上4 个点的位置相对应,从而可以得到对应的机器人的位置。
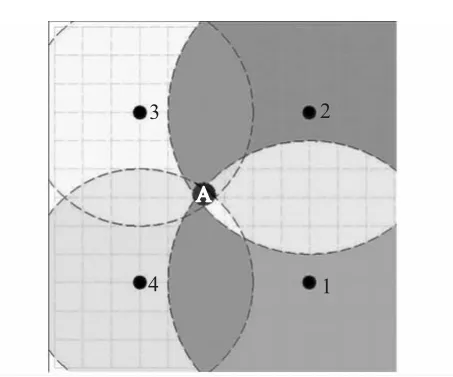
图9 机器人坐标信息Fig 9 Coordinate information of robot
嗅觉机器人寻找气味源实验共做了8 组,结果如表1所示,嗅觉机器人的平均定位误差为0.2 m,现有的气味源定位机器人误差为0.5 m,通过设计的气味源定位算法可以提高定位精度。通过无线传感器网络定位套件,操作人员可以在室外电脑上获得有害气体泄漏源的位置信息。
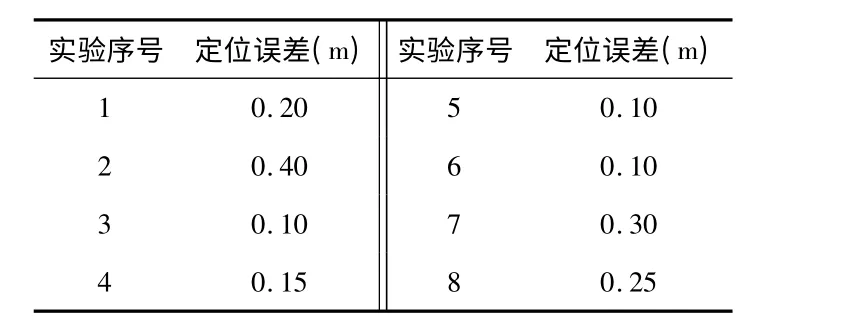
表1 移动机器人气味源定位实验结果Tab 1 Experimental result of mobile robot odor source localization
4 结 论
本文设计的嗅觉机器人使用结合Z 字形搜索策略和浓度梯度搜索策略的气源定位算法可以找到气味源。效果比单一浓度梯度搜索算法精度提高了0.3 m,搜索时间减少了5 s。最后,结合无线传感器技术,气味源的坐标可以通过远离气味源的PC 上获得,为移动机器人气体泄漏源坐标定位提供了一种方案。
[1] 孟庆浩,李 飞.主动嗅觉研究现状[J].机器人,2006,28(1):90-93.
[2] 路光达.一种机器人仿生气味源定位策略[J].河北工业大学学报,2010,39(5):48-52.
[3] 蔡 愈.移动机器人主动嗅觉定位技术的研究[D].天津:河北工业大学,2009.
[4] Russell R A.Locating underground chemical sources by tracking chemical gradients in 3 dimensions[C]∥Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems,USA:IEEE,2004:325-330.
[5] Hayes A T,Martinoli A,Goodman R M.Distributed odor source localization[J].IEEE Sensors,2002,2(3):260-271.
[6] 王 阳,孟庆浩,李 腾.室内通风环境下基于模拟退火算法的单机器人气味源定位[J].机器人,2013,35(3):283-289.
[7] 李吉功,孟庆浩,李 飞,等.时变流场环境中机器人跟踪气味烟羽方法[J].自动化学报,2009,35(10):1327-1333.
[8] Ishida H,Suetsugu K,Nakamoto T.et al.Study of autonomous mobile sensing system for localization of odor source using gas sensors and anemometric sensors[J].Sensors and Actuators A,1994,45(2):153-157.
[9] 闫 慈.基于强化学习的多机器人气味源搜索[D].天津:天津大学,2011.
[10]贺 宁,杨建华,陈立伟,等.主动嗅觉轮式移动机器人的系统设计及定位方法研究[J].机械科学与技术,2013,32(2):286-289.
