分布式驱动电动汽车制动防抱死控制策略研究
2015-03-25徐国权濮龙锋王树荣
张 汝,徐国权,濮龙锋,王树荣
(1. 泛亚汽车技术中心有限公司,上海 201201; 2. 苏州广博力学环境实验室,苏州 215122)
前言
电动汽车的研发与推广应用是解决能源与环境问题的有效途径[1]。在驱动形式上,电动汽车主要可以分为集中式和独立式两种结构。与集中式驱动相比较,采用独立驱动的车辆能够减轻质量,简化传动系的布置,同时还可以通过对驱动电机的独立控制更好地发挥车辆的动力学潜能,提高行驶安全性[2]。本文针对独立驱动电动汽车在紧急制动工况下电机力矩与液压制动力矩的协调控制问题开展研究,所基于的硬件结构如图1 所示。
其中,1 为车轮,2 为液压制动轮缸,3 为常闭电磁阀,4 为液压泵及其电机,5 为低压储能器,6 为高压储能器,7 为常开电磁阀,8 为轮缸压力传感器,9 为驱动电机及其减速器,10 为轮速传感器。
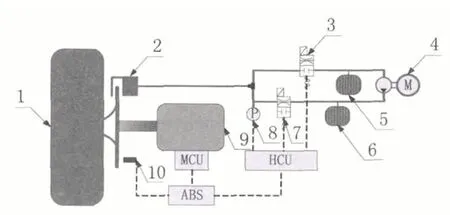
图1 电液复合制动的硬件结构
在电动汽车进行紧急制动时,若不对再生制动加以控制,会造成再生制动力矩干扰ABS 系统正常工作,从而恶化制动效果[3]。针对紧急制动时再生制动力矩的控制问题,国内外学者展开了广泛的研究。文献[4]中,作者设计逻辑门限值来控制回馈制动力矩的开闭从而达到调节总制动力矩大小的目的。文献[5]中,作者计算出防抱死制动时所应施加到车轮上的制动力,后将此制动力尽可能由再生制动力来实现,从而最大限度回收了制动能量。文献[6]中作者提出仅利用电制动,用滑模观测器估算摩擦力和车速,用滑模控制器控制车轮滑移率来实现ABS 控制。
本文以提高制动安全为目标,针对分布式驱动电动汽车的特点,提出一种电液复合双路防抱死制动控制策略。所提控制策略不是以总力矩大小来约束电机力矩输出,而是以最优滑移率为目标,独立进行电机力矩与液压制动力矩的控制。同时考虑到电机力矩与液压制动力矩的差异,通过合理选择两者控制算法,达到充分利用电机力矩响应迅速,具有驱动、回馈制动双向特性的优势,弥补液压制动力矩响应较慢的不足,提高车轮最优滑移率跟随能力。
通过搭建半实物仿真平台,验证了所提双路控制策略的有效性。
1 电液复合制动防抱死双路控制策略
分布式驱动电动汽车在紧急制动时,为使车轮滑移率更好地跟随最优滑移率,独立进行电机力矩与液压制动力矩的控制,控制流程如图2 所示。控制器工作时,首先接收轮缸压力传感器信号、通信总线上电机力矩信号、轮速传感器信号估算车轮当前滑移率。据此,液压制动力矩控制模块和电机力矩控制模块根据各自控制算法计算最优轮缸压力和电机力矩。
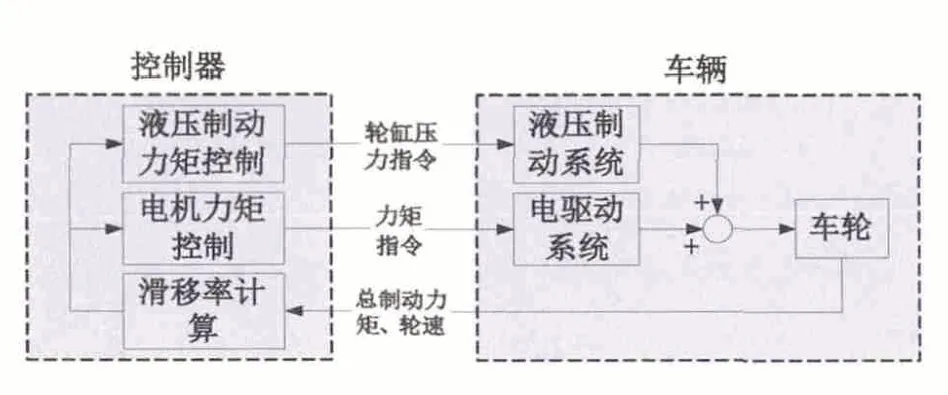
图2 双路控制策略结构图
1.1 液压制动力矩控制
由于滑模变结构控制方法具有响应快、鲁棒性好的优点,本文用其进行液压制动力矩的控制。
采用如图3所示的单轮车辆模型进行控制器的设计,忽略空气阻力和滚动阻力。
车辆运动方程,

式中:Fd为地面摩擦力;M 为整车质量;V 为车身速度。车轮运动方程,

式中:Thb为制动器作用到车轮上的制动力矩;Rr为车轮滚动半径;J 为车轮绕y 轴转动惯量;Vω为车轮转速。
其中,

式中:μ 为路面摩擦系数;FN为车轮所受垂向载荷。
计算滑移率:

考虑到可实施性,选择一阶线性滑移线,用车轮滑移率作为状态变量,
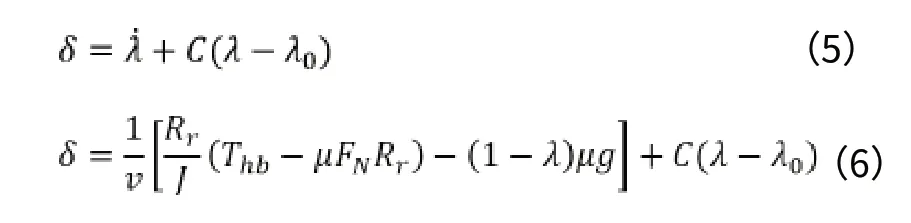
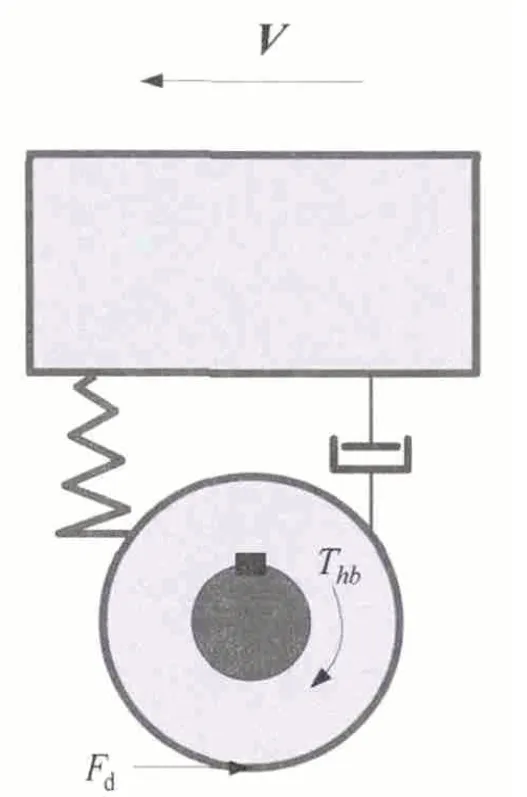
图3 汽车单轮模型
式中:C 为加权系数;λ0为最优滑移率;g 为重力加速度。
引入等速趋近率,

则有,
1.2 电机力矩控制
与液压制动力矩相比,电机力矩响应迅速、具有双向特性且力矩大小精确可调,因此基于所推导电机力矩与车轮滑移率传递函数关系进行力矩控制。在1.1 节中单轮模型基础上变换车轮运动方程为,

式中:Fmb为电机力矩等效作用到轮胎与地面接触点上轮胎所受的力;Mω为车轮等效质量。
轮胎所受地面力的变化量△Fd与摩擦系数变化量△μ 有如下关系,

引入μ-λ 曲线的斜率为k,

因此,在控制器采样点记车速为V0,轮速为Vω0,

由此可以得到由制动力到Fmb到滑移率λ 的传递函数G(s)为,

其中,

1.3 车速估计
可由制动器轮缸压力得到车轮所受液压制动力矩Thb,
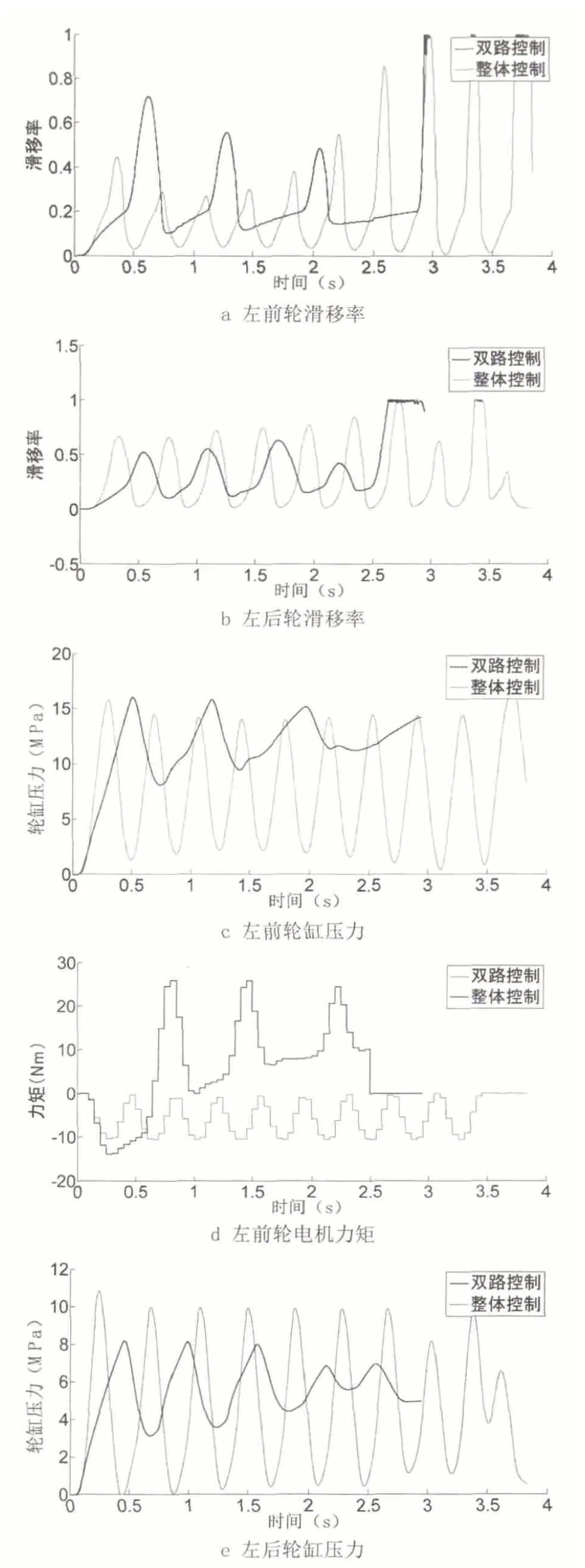
图5 高附着系数路面防抱死制动仿真结果
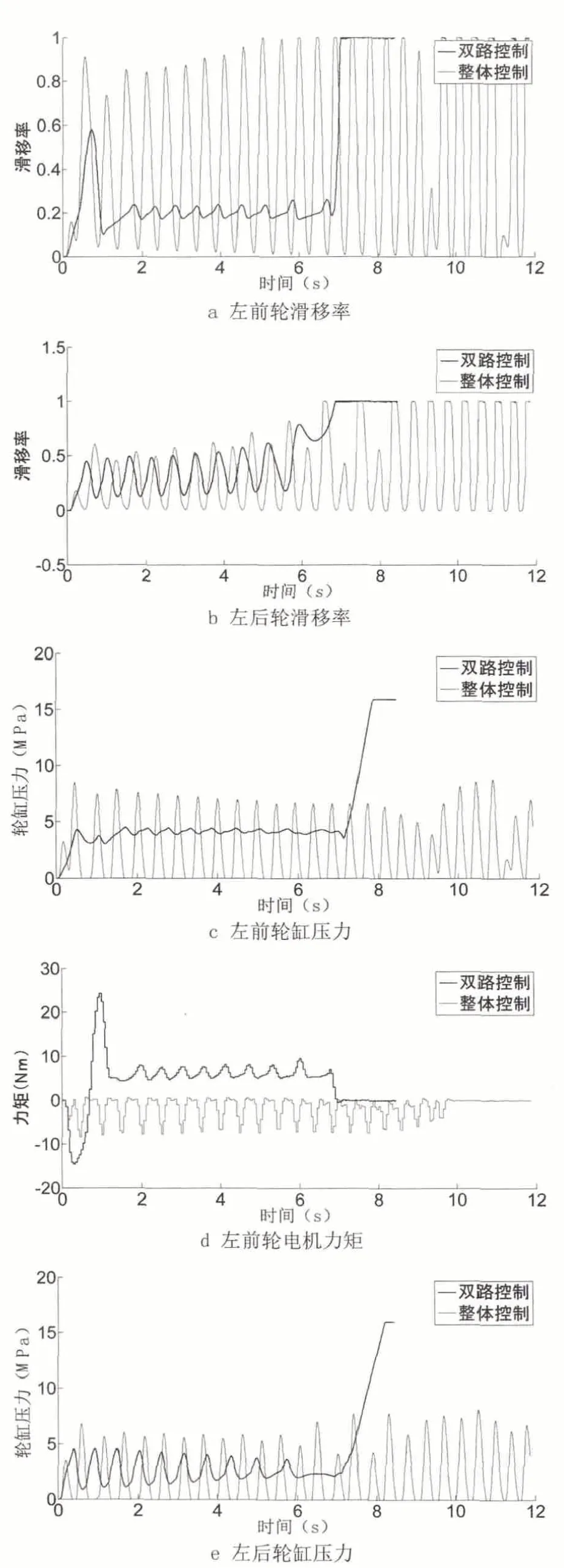
图6 低附着系数路面防抱死制动仿真结果

式中:P 为轮缸压力;Kb为制动因数;Rp为制动盘半径。
电机力矩Tmb可以由读取电机控制器信息获得。因此,

2 仿真验证
双电机独立前驱动电动汽车直线紧急制动工况的半实物仿真分为高附着系数路面(附着系数为0.9)和低附着系数路面(附着系数为0.3)两种,并假设最大利用附着系数出现在滑移率为0.2 时。仿真时,电动汽车以80km/h 初速度进行紧急制动,忽略驾驶员踩下制动踏板的延迟。
仿真结果表明在紧急制动工况,双路控制策略控制下的车辆制动距离和制动时间都有了较大幅度减小。
当采用将电机力矩与液压制动力矩作为整体进行控制时,电机力矩与液压力矩同时增大或者减小,如图6中c、d,这样难以利用电机力矩响应较快的优势,导致力矩调节周期较长,整体控制下最优滑移率追踪能力较差。当采用双路控制策略时,电机力矩与液压制动力矩相互独立控制,各自根据控制算法进行力矩调节,特别是电机可以发出驱动力矩快速降低滑移率,提高了力矩响应灵敏性,双路控制下最优滑移率追踪效果较好。
但双路控制下,会出现液压制动系统工作时电机产生驱动力矩,这会增大制动盘和制动钳磨损。
3 结论
1)建立了分布式驱动电动汽车紧急制动时的电液复合制动双路防抱死控制策略,有效管理了紧急制动时电机的力矩,缩短了紧急制动时的制动距离与制动时间。
2)根据液压制动系统的特点,选择滑模变结构控制方法进行液压制动力矩的控制,提高了力矩响应速度;依据电机力矩与车轮滑移率传递关系进行电机力矩控制,充分利用电机力矩响应较快、具有驱动/制动双向性的优势,提高了最优滑移率追踪能力。
3)电机力矩的加入提高了车辆紧急制动性能,制动过程中电机产生驱动力矩会增大制动盘和制动钳磨损。
[1]Ehsani Mehrdad, Gao Yimin, Emadi Ali. Modern electric, hybrid electric, and fuel cell vehicles fundamentals, theory, and design[M]. Boca Raton, America: CRC Press, Taylor & Francis Group,2009: 25-26.
[2]解少博.双电机独立驱动汽车协调制动控制关键问题研究[D].北京:北京理工大学.2011.
[3]陆欣.燃料电池城市客车制动能量回馈系统协调控制[D].北京:清华大学, 2009.
[4]初亮,吕廷秀,张永生 等.混合动力轿车再生制动与防抱死集成控制系统[P].中国专利:CN200710055687.9, 2007-05-21.
[5]藤滋,松浦正裕,小九保浩一 等.车辆制动控制设备[P].中国专利:CN200610084162.3, 2006-08-24.
[6]Hsiao, Min-Hung. Antilock Braking Control of Electric Vehicles with Electric Brake[C]. SAE. Paper Number: 2005-01-1581,2005-04-11.