内置式永磁同步电机初始位置检测方法研究
2015-03-25郑昌陆胡月波
郑昌陆, 胡月波
(1.上海申传电气股份有限公司,上海 200072; 2.上海大学 机电工程与自动化学院,上海 200072)
内置式永磁同步电机初始位置检测方法研究
郑昌陆1,2, 胡月波2
(1.上海申传电气股份有限公司,上海 200072; 2.上海大学 机电工程与自动化学院,上海 200072)
电机初始位置准确性直接决定着电机的启动性能,介绍了一种基于高频脉振电压注入的转子初始位置检测方法。在估计的转子参考坐标系中注入高频的脉振电压,并在对应的高频电流响应中提取出位置估计信号同时在高频电流的二次谐波分量中提取出极性判断信号。仿真结果显示能快速准确的得到估计的转子初始位置,从而验证了方法的有效性。
永磁同步电机;高频脉振电压注入;初始位置;位置观测器;仿真
0 引 言
内置式永磁同步电机的转子磁链角度与转子位置直接相关,在电机启动时由于转子初始位置是任意的,因此必须对它进行检测,其检测的准确性直接决定着电机的启动性能。若采用有传感器的启动方法,普通的增量式编码器无法获得转子初始位置,因此需要采用具有位置检测功能的绝对式编码器或者更复杂的传感器设备,这不仅增加了系统成本,而且也降低了运行的可靠性,因此在无传感器条件下对内置式永磁同步电机转子初始位置进行检测是十分关键问题。
由于电机启动前转速为零,在定子侧无法检测出基频信号,这给无传感器初始位置检测提出了难题,使得传统基于电机反电动势的位置检测方法无法实现。比较简单可行的方法有转子位置预定位法[1-2],通过在电机启动前使转子预先旋转到某一固定位置来获得转子初始角度信息,然而这种方法会引起转子发生任意方向的旋转,限制了使用的范围。文献[3-4]采用向电机注入一系列脉冲电压矢量的方法,通过不断比较电流响应的幅值,使估计转子位置向真实转子位置逼近,然而这种方法不仅检测时间长而且准确性受到电流采样精度的直接影响。基于高频信号注入的位置检测方法[5-7]利用电机磁性凸极的特性能够不受电机转速影响,对永磁同步电机就转子初始位置的检测具有良好可行性,然而这种方法只能检测出转子磁链所在轴的位置,无法判断具体的极性。文献[8-10]在此基础上结合电机的饱和特性,并采用分步的方法通过两次信号注入能够分别得到转子磁链轴位置和极性,但同时也增加了算法的复杂性。文献[11]仅需注入高频电压信号,在对应的高频电流分量以及高频电流二次谐波分量中提取出转子磁链轴位置信息和极性判断信号从而得到转子的初始位置,具有良好的快速性和准确性。本文着重探讨了基于高频脉振电压注入的内置式永磁同步电机的转子初始位置检测方法,能够在电机的电流响应中得到准确的转子初始位置,仿真结果和实际应用验证了该方法的有效性。
1 内置式永磁电机饱和效应
在转子参考坐标系中,若不考虑饱和效应定子磁链的表达式如下:
(1)
其中ψsd,ψsq为定子磁链的dq轴分量,id、iq为定子电流的dq轴分量,Ld、Lq为dq轴电感,ψf为与定子交链的永磁体磁通。
在永磁同步电机的设计中,为了提高铁芯的利用率,通常使主磁路具有一定的饱和度,对于内置式永磁同步电机,由于转子参考坐标系的d轴与永磁体所产生的磁通方向一致即与N极对应,因此在d轴方向上的铁芯会达到一定的饱和,当id> 0时,由d轴电流产生的磁链会同向叠加到永磁体所产生的磁链上,使得d轴方向上磁链密度大,d轴附近铁芯饱和程度加深,磁阻增大,d轴电感减小;当id< 0时,由d轴电流产生的磁链则会反向叠加到永磁体产生的磁链上,此时在d轴方向上磁链密度减小,d轴附近铁芯饱和程度降低,磁阻减小,d轴电感增大,图1(a)给出了这种情况下d轴电流和d轴磁链的关系曲线。
然而当转子参考坐标系的d轴与永磁体产生磁通方向相反即与S极对应时,若id> 0,此时由定子电流产生的磁链会反向叠加到永磁体产生的磁链上,使得d轴方向上磁链密度减小,d轴附近铁芯饱和程度降低,磁阻减小,d轴电感增大;若id<0,由定子电流产生的磁链会同向叠加到永磁体产生的磁链上,在d轴方向上磁链密度上升,d轴附近铁芯饱和程度加深,磁阻增大,d轴等效电感减小,图1(b)给出了这种情况下d轴电流和d轴磁链的关系曲线。从分析可以看出当转子参考坐标系的d轴分别与永磁体的N极或S极对应时,id对Ld的影响将会不同,利用这种饱和效应可以对永磁体的极性进行判断。
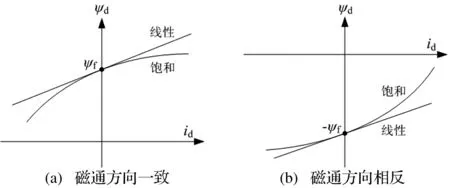
图1 IPMSM的d轴电流和d轴磁链的关系曲线
2 基于高频脉振电压注入的IPMSM初始位置检测
对于内置式永磁同步电机,在转子参考坐标系中若考虑d轴上的磁链饱和效应,则id和ψd的关系用泰勒级数表示可以写成如下形式[11]:
(2)

在转子参考坐标系中,永磁同步电机电压方程如下:
(3)
当在静止条件下给电机注入高频的电压信号,式(3)可以简化为:
(4)
将式(4)代入式(2)中可得到d轴分别对应永磁体N极和S极这两种情况下id的表达式为:
(5)
采用基于高频脉振电压注入的方法是在估计的转子参考坐标系中注入高频的脉振电压,并在估计转子参考坐标系的电流响应中提取出用于位置估计和极性判断的信号,其系统结构如图2所示。由于在转子参考坐标系中定子电流的dq轴分量用泰勒级数可以表示为:
(6)
将式(4)代入(6)中可得:
(7)
其中ur*=ud-juq,因此在转子参考坐标系中永磁同步电机的高频电流响应可以表示为:
(8)
由于实际中无法得到准确的转子位置,将式(8)转换到估计的转子参考坐标系中得:
(9)


图2 采用高频脉振电压注入法的系统结构图
当在估计转子参考坐标系下注入高频脉振电压Vinj时有:
(10)
电机的高频电流响应为:
(11)

(12)

图3 采用高频脉振电压注入法的信号处理过程
3 位置观测


图4 带永磁体极性判断的转子位置观测器结构图

(13)
当n=1,3,5…为奇数时,虽然误差矫正信号为零,但观测器不能达到局部稳定;当n=0,2,4…为偶数时,误差矫正信号为零,且观测器能够达到局部稳定。特别地,当n=0,4,8…为4的倍数时,估计的角度对应永磁体的N极位置,此时极性判断信号ipol=-1;当n=2,6,10…时,估计的角度对应永磁体的S极位置,此时极性判断信号ipol=1。因此,通过将极性判断信号做为位置估计的补偿项,图4的观测器能够准确地跟踪转子的初始位置。
4 仿真结果
为验证文中研究的这种初始位置检测方法有效性,本文建立了考虑饱和效应的内置式永磁同步电机模型,电机参数为:极对数p=4;定子电阻R=0.2 Ω;d轴定子电感Ld=5 mH;q轴定子电感Lq=8.5 mH;电机转动惯量J=0.089 kg·m2;与定子交链的永磁体磁通ψf=0.175 Wb。两种方法中注入高频电压的幅值和频率都为30 V和500 Hz。


图5 采用高频脉振电压注入法转子在不同初始位置时的仿真结果
从图5中可以看出采用基于高频电压注入的转子初始位置检测方法,估计的转子角度都能够快速准确的跟踪转子初始位置,无论采用哪种方法当两个转子初始位置间隔180°时,它们的定子电流轨迹基本相同,但从ipol信号中可以判断出两者转子极性的差异,从而得到准确的转子初始位置。
5 结束语
本文深入研究了基于高频脉振电压注入的内置式永磁同步电机转子初始位置检测方法,这种方法能够在对应的高频电流响应中提取出位置估计信号。同时在高频电流的二次谐波分量中提取出极性判别信号,从而能够快速准确地得到估计的转子初始位置,仿真结果验证了本文研究方法的有效性。
[ 1 ] 王晓明,王玲.电动机的DSP控制TI公司DSP应用[M].北京:北京航空航天大学出版社,2004.
[ 2 ] 朱烷秋,成秋良.无起动绕组永磁同步电机初始定位及起动策略[J].中国电机工程学报,2008,28(9):61-65.
[ 3 ] 梁艳,李永东.无传感器永磁同步电机矢量控制中转子初始位置的估算方法[J].电工技术杂志,2003,22(2):10-13.
[ 4 ] 韦鲲,金辛海.表面式永磁同步电机初始转子位置估计技术[J].中国电机工程学报,2006,26(22):104-109.
[ 5 ] M J CORLEY, AND R D LORENZ.Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds[J]. IEEE Transactions on Industry Applications, 1998, 34(4): 784-789.
[ 6 ] JI-HOON JANG, JUNG-IK HA. Analysis of permanent-magnet machine for sensorless control based on high-frequency signal injection[J]. IEEE Transactions on Industry Applications, 2004, 40(6): 1595-1604.
[ 7 ] 刘毅,贺益康,秦峰,等.基于转子凸极跟踪的无位置传感器永磁同步电机矢量控制研究[J]中国电机工程学报,2005,25(17):121-126.
[ 8 ] 万山明,吴芳,黄声华.基于高频电压信号注入的永磁同步电机转子初始位置估计[J].中国电机工程学报,2008,28(33):82-86.
[ 9 ] 王高林,杨荣峰,于泳,等.内置式永磁同步电机无位置传感器控制[J].中国电机工程学报,2010,30(30):93-98.
[10] 刘颖,周波,李帅,等.转子磁钢表贴式永磁同步电机转子初始位置检测[J].中国电机工程学报,2011,31(18):48-54.
[11] YU-SEOK JEONG,ROBERT D LORENZ,THOMAS M JAHNS. Initial rotor position estimation of an interior permanent-magnet synchronous machine using carrier-frequency injection methods[J]. IEEE Transactions on Industry Applications, 2005, 41(1): 38-45.
[12] HYUNBAE KIM, MICHAEL C HARKE, ROBERT D LORENZ.Sensorless control of interior permanent-magnet machine drives with zero-phase lag position estimation[J]. IEEE Transactions on Industry Applications, 2003, 39(6): 1726-1733.
A Research on the Initial Position Detection Method for the Built-in Permanent Magnet Synchronous Motor
ZHENG Chang-lu1,2, HU Yue-bo2
(1.Shanghai SH-Driver Electric Co., Ltd., Shanghai 200072, China;2.College of Electromechanical Engineering & Automation, Shanghai University, Shanghai 200072, China)
The accuracy of the initial position of a motor determines its starting performance directly. This paper describes a detection method for the initial rotor position based on a high frequency pulsating voltage injected into the estimated reference coordinate system of the rotor. The position estimation signal is derived from the corresponding high frequency current response, and the polarity judgment signal is derived from the second harmonic element of the high-frequency current. Simulation results show that the estimated initial position of the rotor can be obtained quickly and accurately and verify the validity of the method.
permanent magnet synchronous motor; high-frequency pulsating voltage injection; initial position; position observer; simulation
上海市科技型中小企业技术创新基金(1004H142100)
10.3969/j·issn.1000-3886.2015.03.004
TP273
A
1000-3886(2015)03-0010-04
郑昌陆(1974-),男,上海人,高级工程师,博士,研究方向为永磁同步电机高性能控制技术开发及应用。 胡月波(1990-),男,安徽利辛人,硕士生,研究方向为电工理论与新技术。
定稿日期: 2014-09-26
