基于多层流模型的不确定性故障诊断技术
2015-03-23王文林杨明杨军陈万青
王文林,杨明,杨军,陈万青
(1.哈尔滨工程大学核安全与仿真技术国防重点学科实验室,黑龙江 哈尔滨150001;2.中国舰船研究设计中心,湖北 武汉430000)
当核动力装置发生故障时,操纵员需要及时对故障进行诊断。由多系统协作完成指定功能的核动力装置,即使单一设备发生故障,其故障影响也会在设备和系统间传递,从而引发大量警报,操纵员承受高度的工作负担和心理压力,容易产生人因失误,危及核动力装置的可靠性和安全性。
传统的故障诊断技术需要建立故障及其典型征兆之间的对应关系,采用基于规则的确定性推理策略进行故障诊断。然而,由于核动力装置结构复杂,参数繁多且相互影响,故障发生时将导致大量系统运行参数异常,故障原因和故障征兆之间的因果关系由于故障位置、故障程度以及参数限值的不同而发生变化,某一故障原因可能导致多个故障征兆,某一故障征兆可能对应多个故障原因,难以获得确定的故障诊断规则。此外,对于已知故障,传统的故障诊断技术可以依赖领域专家的经验建立确定性的推理规则,然而对于未知故障,由于缺少专家的经验,基于规则的产生式系统就不能适用[1],常出现诊断结果准确率不高或者故障漏报现象。不确定性故障诊断技术可以拓展故障诊断系统的推理能力和容错能力[2],如何表示和处理知识的不确定性是人工智能领域需要解决的重要和难点课题[3]。
本文提出基于多层流模型(multilevel flow models,MFM)描述系统知识、引入影响因子(impact factor)来描述参数间因果关系的强度、采用警报分析方法并结合贝叶斯理论进行不确定推理实现故障诊断。
1 基于MFM的知识表示
MFM是20世纪80年代由丹麦科学家Morten Lind提出,是一种基于守恒原理、面向目标的层次化系统建模方法,可以描述如核动力装置等大规模复杂系统的设计目的及其实现手段,是一种通用的知识表示方法。如图1所示,MFM运用符号学方法从系统的目标、功能以及物理部件3个角度描述复杂系统[4-5]。
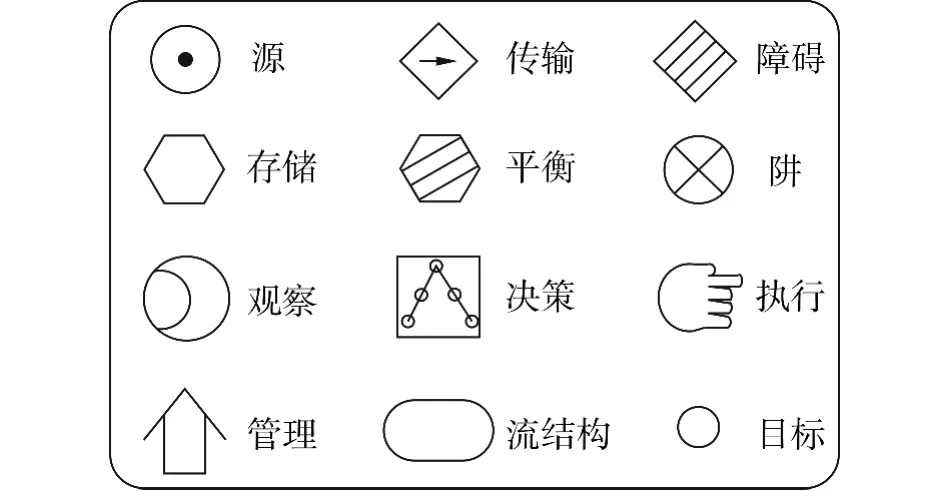
图1 多层流模型符号Fig.1 Symbols of MFM
多层流模型使用如下基本概念[6-7]:
1)目标:指一个系统预期实现的设计意图,是多层流模型中最核心的概念。
2)功能:是具有相同或相似输入和输出关系的物理部件的高度抽象。功能是实现系统目标的手段,表示系统或部件在实现某个目标过程中所发挥的作用。主要包括以下常用的6个基本功能:
源:描述系统向外提供物质、能量或信息的能力。
传输:描述物质、能量或信息从系统一个部分转移到另一个部分。
障碍:与传输功能相反,障碍功能描述阻止物质、能量或信息从系统的一个部分转移到另一个部分。
存储:描述系统存储物质、能量或信息的能力。
平衡:描述系统在其入口和出口间保持物质或能量平衡的能力。
阱:描述系统吸收物质和能量的能力。
3)流:功能按物质、能量和信息的流动方式连接形成流。
4)关系:MFM中使用3种常用的关系将物质流、能量流和信息流相互关联形成一个有机的整体,表示系统物质、能量和信息之间复杂的逻辑关系。
实现关系:连接物理部件到功能,表示该功能通过物理部件实现。
达成关系:连接功能到目标,表示该功能达成指定的目标。
条件关系:连接目标到功能,表示完成该功能要以目标的实现为前提。
在MFM的通用推理规则中,功能单元之间的知识是唯一对应的,例如传输与存储功能满足以下因果关系[8]:
传输功能的高警报状态可以导致与它输出端相连的存储功能处于高警报状态;
传输功能的低警报状态可以导致与它输出端相连的存储功能处于低警报状态;
存储功能的高警报状态可以导致与它输入端相连的传输功能处于低警报状态;
存储功能的低警报状态可以导致与它输入端相连的传输功能处于高警报状态;
再加上当传输与存储功能都处于正常时的推理关系,此时传输与存储功能之间的因果关系如图2所示。

图2 MFM中传输与存储功能的因果关系Fig.2 Causalities between transport and storage functions of MFM
系统MFM描述了系统运行的目的性和功能特性,可以有效解决由于缺乏系统知识因而难以提取故障诊断规则的问题。然而在应用通用的MFM推理规则进行故障诊断时,由于故障征兆之间的因果关系是确定的,因此只有当故障征兆与特定的推理规则完全匹配时才能准确识别故障,在证据不足时,利用通用的MFM推理规则进行故障诊断就容易出现漏诊。
2 不确定性故障诊断技术
2.1 不确定性知识表示
如图3所示,首先对MFM进行扩充,将功能状态处理为具有不确定性的因果对应关系,即功能的某一状态将有可能导致另一功能处于不同的状态,同时引入影响因子用来描述原因与征兆之间的因果依存程度,表示原因事件导致结果事件发生的条件概率。
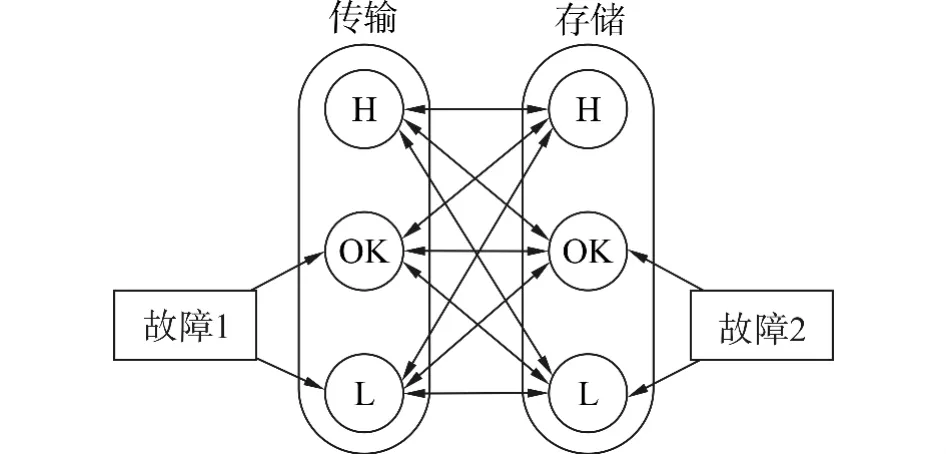
图3 传输功能与存储功能之间的关系Fig.3 Relations between transport and storage
基于MFM的不确定性推理模型中涉及如下基本概念:
1)状态变量Si:表示功能单元i的状态,可以为多状态,在本文中假定(除障碍功能外)所有功能具有如下3种状态:Si=H,高状态;Si=OK,正常状态; Si=L,低状态。障碍功能仅具有2种状态:Si=OK,正常状态;Si=N,泄露状态。
2)故障:指设备不能完成其规定的功能。本文故障划分为2种模式:部件状态Bi:指所分析功能的物理部件失效。系统故障Xi:指非所分析功能的物理部件失效导致的故障,在MFM中包含以下3种类型:
上游功能故障:由于上游功能的异常而导致的故障状态。
下游功能故障:由于下游功能的异常而导致的故障状态。
条件故障:由于完成功能所需的条件尚未满足而导致的故障状态。
3)影响因子Pij:表示某一事件i的发生引起结果事件j发生的概率。0≤Pij≤1,Pij=0表示事件完全独立,Pij=1表示事件完全相关。影响因子可综合部件故障发生概率、部件的物理特性、运行经验和专家经验设定。例如图3所示存储功能处于高状态的影响因子可以设定为

表示传输单元的高状态、正常状态和低状态分别以75%、25%和0%的概率使存储功能处于高状态。与传统MFM模型相比,影响因子的设定既考虑到根据守恒原理入口流量高将导致存储器液位上升,又考虑到反映了警报阈值设定、测量精度、延迟等实际问题的影响,传统的确定性推理模型可以看作是不确定性推理模型的一种特殊状态。
2.2 不确定性知识推理
采用贝叶斯理论作为不确定性推理方法,通过计算给定故障征兆下各故障原因的发生概率,实现故障诊断功能。不确定知识推理使用如下基本概念:
1)因果子树:以树形结构描述导致某一功能状态的直接原因。根据MFM所描述的因果关系,建立以各功能状态为顶事件的因果子树。
如图4所示,Fj(Si)表示处于Si状态的功能单元Fj,Bx表示功能单元的部件故障。
2)状态监测:根据仪表和测量系统确定功能单元的实际运行状态。
3)因果树:由相关的因果子树连接而成的树形结构,用于描述导致某一功能状态的原因。在生成因果树时需注意系统具有非自反性,即事件不能成为自己的原因。因此在形成因果树时,需要断开逻辑环路,避免在底事件到顶事件的因果路径中存在重复事件。
4)证据E:系统实际运行状态称为证据。设系统由n个功能单元组成,各功能状态为Si,则E可用下式表达:

5)故障诊断:根据贝叶斯公式[9],在给定证据E的条件下,计算各故障发生的概率:

式中:Bi∩E事件的模型如图5所示。
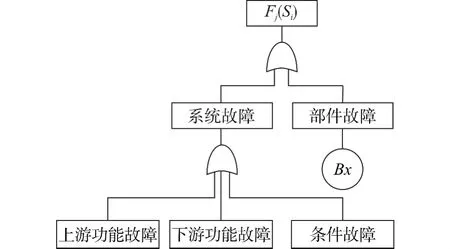
图4 功能状态的因果子树Fig.4 Sub causal tree of functional status
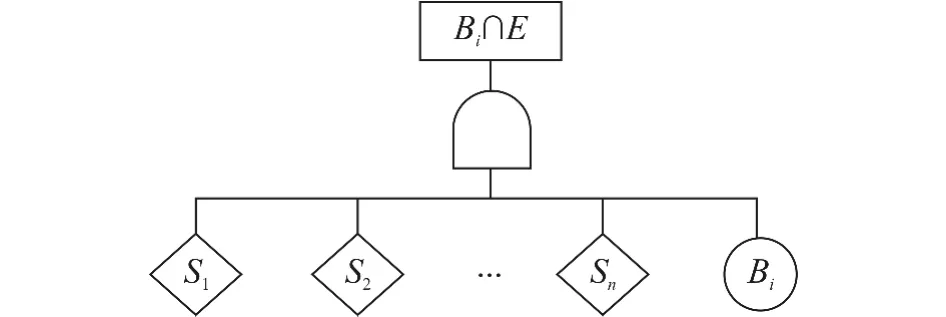
图5 故障与证据关系图Fig.5 Relationship between fault and evidence
不确定性诊断知识库包括系统多层流模型、因果子树模型、基本故障统计概率模型以及功能状态影响因子库。不确定性故障诊断流程如图6所示。

图6 不确定性故障诊断流程Fig.6 Uncertain fault diagnosis process
3 算例分析
3.1 系统描述
为了验证所提出的不确定性故障诊断方法的合理性及有效性,本文以2环路压水堆冷却剂系统为例,其中具有稳压器的环路称为A环路,另一侧称为B环路[10-11],系统结构如图7所示。
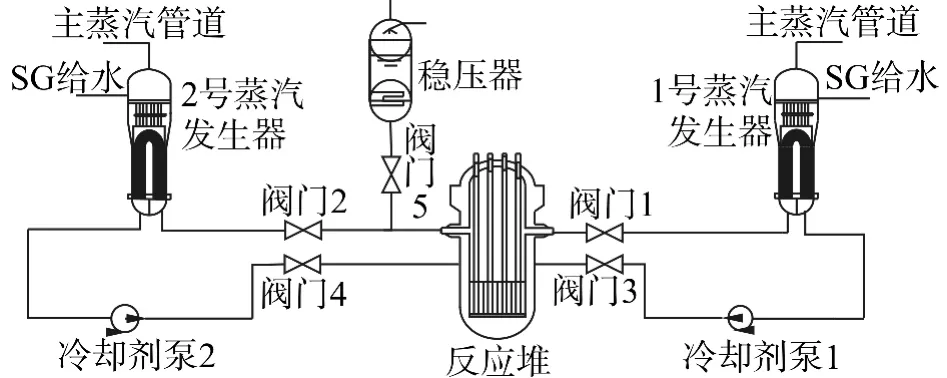
图7 反应堆冷却剂系统结构Fig.7 Structure of reactor coolant system
3.2 系统建模
系统MFM物质流和能量流分别如图8和图9所示。
3.3 仿真分析
根据所建立的MFM功能单元间的因果关系,确定故障原因、故障模式、功能单元间的影响因子以及警报阈值。
1)确定故障原因:选取6个典型事故,故障ID及名称如表1所示。
2)确定因果关系:根据改进的MFM规则,确定功能单元状态之间不确定性因果关系。
3)确定功能阈值:警报阈值设定对故障诊断结果有重要影响。一般而言,设置较小的警报阈值可以较早发现故障,故障集较小,但诊断结果容易受到环境干扰,适用于解决较低约定层次的诊断问题;设置较大的警报阈值,警报信息抗干扰能力强,但容易忽视某些设备和系统信息,难以进行精确诊断,适用于解决较高约定层次的诊断问题。
本文采用正常值的±1%作为报警阈值,即增幅超过1%引发高警报状态,降幅超过1%引发低警报状态。本研究采用取自RELAP5/Mod2的事故仿真数据,其中21个系统参数进行了仿真实验,仿真实验数据采集频率为1 s,故障导入时间定义为0 s。
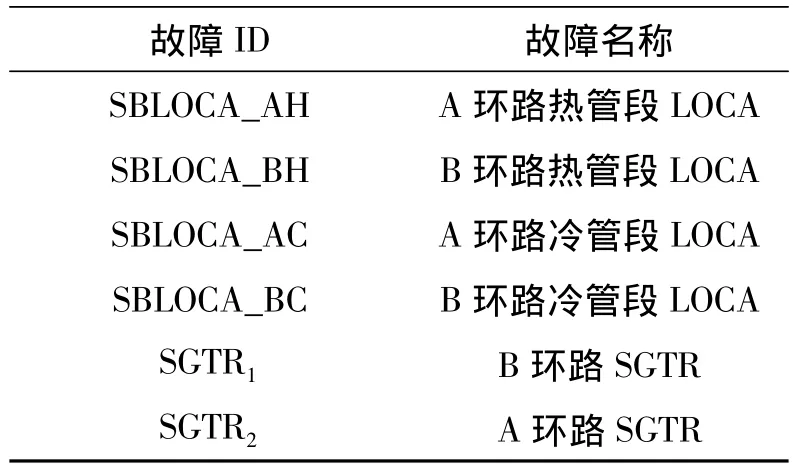
表1 典型故障ID及名称Table1 ID and name of faults

图8 反应堆冷却剂系统物质流Fig.8 Mass flow of reactor coolant system

图9 反应堆冷却剂系统能量流Fig.9 Energy flow of reactor coolant system
按照图8所示建模方法,建立上述警报对应功能 状态的因果子树,合并成因果树。例如功能单元M-F17,其上游功能单元为M-F15(没有考虑主泵故障),下游功能单位为M-F1。与M-F17直接关联的故障是A环路冷管段LOCA,当M-F17处于低警报状态时,因果关系及因果子树分别如图10、图11所示。
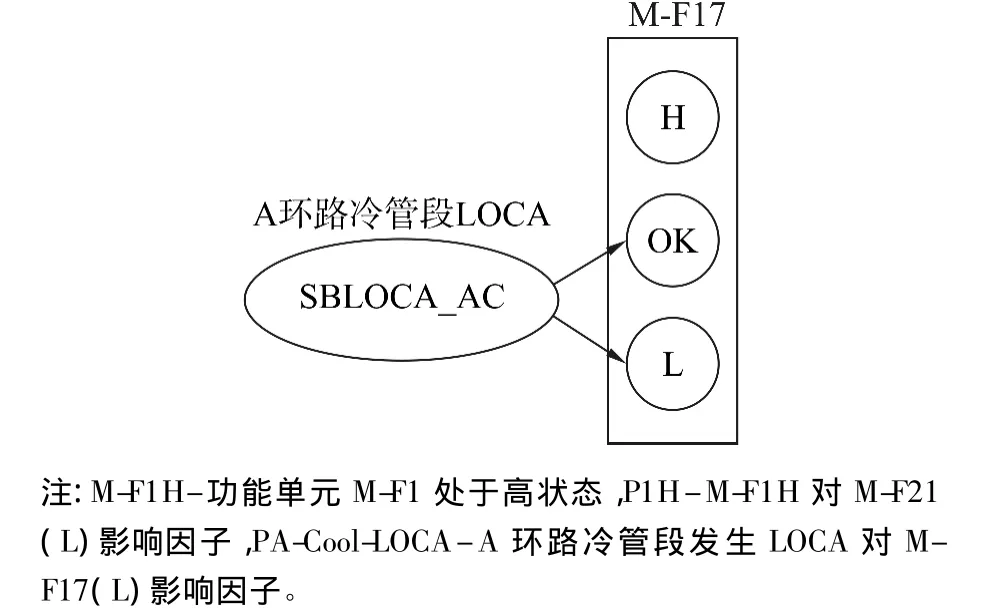
图10 M-F17与A环路冷管段因果关系Fig.10 Causalities between M-F17 and A-cool-leg
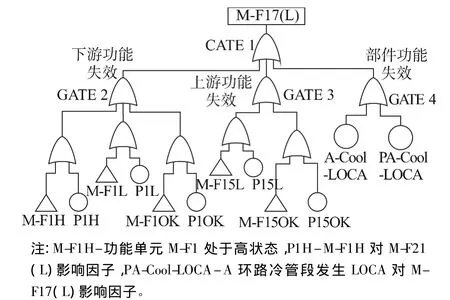
图11 M-F17低状态的因果子树Fig.11 Sub-tree of M-F17 low state
基于多层流模型的流结构以及对应功能单元间的因果模型,在贝叶斯网络中设计如下图12所示。
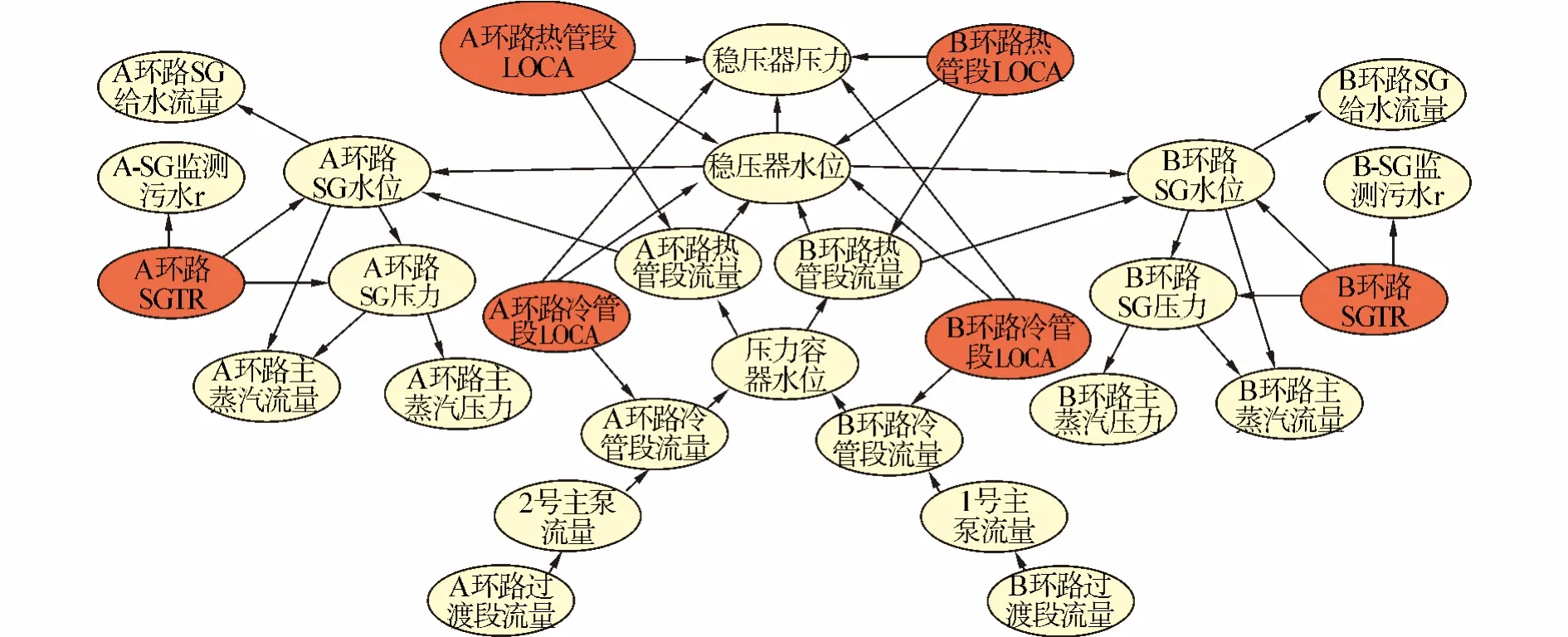
图12 反应堆冷却剂系统贝叶斯网络模型Fig.12 Bayesian network model for reactor coolant system
当反应堆冷却剂系统A环路2号主泵与反应堆之间的冷管段发生10.16 cm冷管段LOCA事故时,根据RELAP5/Mod2得到的系统参数随时间变化的趋势。在事故发生的初始阶段,此时会出现下列警报状态[12]:
稳压器压力低警报;
稳压器水位低警报;
A环路主给水流量高警报;
A环路主蒸汽流量高警报;
A环路过渡段冷却剂流量低警报;
A环路冷管段冷却剂流量低警报。
不确定性定量故障诊断结果如图13所示,事故发生概率在0~1。A环路冷管段LOCA相对于其他事件发生概率较大,可以判断A环路冷管段LOCA事故发生,并且诊断结果与实际预期相符。同时也给予其他典型事故发生的概率,为操纵员提供了深层次的辅助决策。
当SGTR事故发生在A环路,故障程度是1根传热管时,此时出现以下故障征兆如下[13]:
稳压器压力低警报;
稳压器水位低警报;
A环路SG水位低警报;
A环路SG压力低警报;
A环路SG监测污水高警报。
不确定性定量故障诊断结果如图14所示。
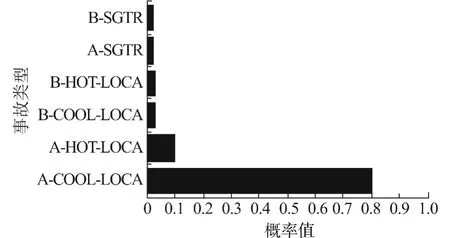
图13 不确定性诊断结果(1)Fig.13 Uncertain diagnostic results(1)
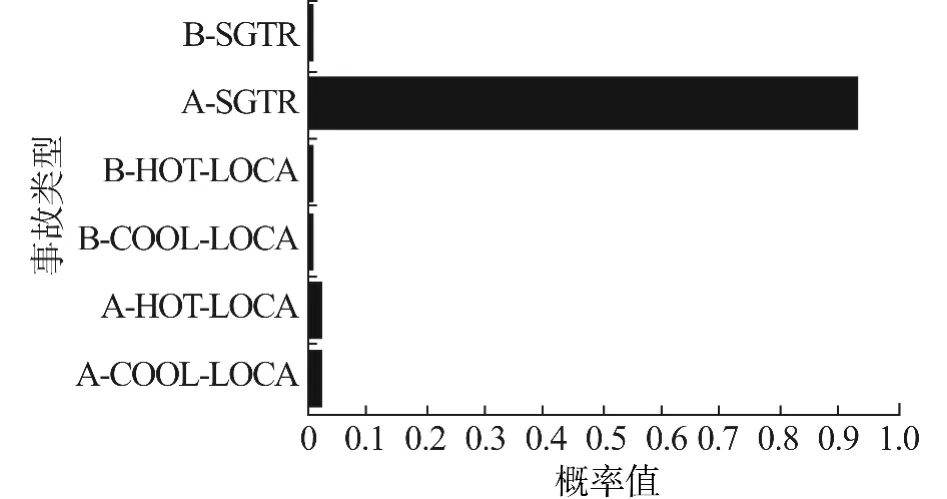
图14 不确定性诊断结果(2)Fig.14 Uncertain diagnostic results(2)
由图14可以看出,A环路SGTR发生的概率明显高于其他事故,可以判断出A环路蒸汽发生器传热管破裂发生,且诊断结果符合实际预期,证明了模型及方法的正确性。
4 结论
本文针对反应堆冷却剂系统,采用基于MFM的功能建模方法进行知识表示,警报分析方法结合贝叶斯理论进行不确定性推理进行故障诊断,并得出以下结论:
1)MFM功能建模可以有效获取系统知识,采用MFM规则描述功能单元间的因果关系,可有效消除诊断规则不确定性对诊断结果的影响,避免漏诊现象的发生。
2)虽然影响因子的设定依赖于运行经验和专家判断,具有一定的不确定性,但故障诊断结果的正确性在很大程度上取决于影响功能状态的主要因素、故障发生概率以及系统参数趋近于警报限值的程度。
3)通过仿真验证证明本文所提出的警报分析方法结合贝叶斯原理可以准确地诊断出系统故障,证明了方法的有效性和模型的正确性。
4)不确定性推理方法可以定量给出某一故障或故障组合作为系统异常状态全局解的可能性,可以作为确定性推理方法的补充,辅助操纵员进行深层次诊断。
[1]夏虹,刘永阔,谢春丽.设备故障诊断技术[M].哈尔滨:哈尔滨工业大学出版社,2009:150-164.
[2]矫立新,陈琛,张岩.基于不确定性推理在抽油机故障诊断中的应用[J].工业仪表与自动化装置,2010,(5): 6-10.
JIAO Lixin,CHEN Chen,ZHANG Yan.Application of fault diagnosis of oil pumping machine based on uncertainty reasoning theory[J].Industrial Instrumentation&Automation,2010,(5):6-10.
[3]王洪春.基于因果图的不确定性推理理论及算法研究[D].重庆:重庆大学,2005:1-5.
WANG Hongchun.Uncertainty reasoning theory and algorithm research based on causal graph[D].Chongqing: Chongqing University,2005:1-5.
[4]LIND M.Modeling goals and functions of complex industrial plants[J].Applied Artificial Intelligence:An International Journal,1994,8(2):259-283.
[5]杨明,张志俭.基于多层流模型的核电厂可靠性分析方法研究[J].核动力工程,2011,32(4):72-76.
YANG Ming,ZHANG Zhijian.Study on quantitative reliability analysis by multilevel flow models for nuclear power plants[J].Nuclear Power Engineering,2011,32(4):72-76.
[6]LIND M.Representing goals and functions of complex systems-An Introduction to multilevel flow modelling90-D-381[R].Lyngby:Technical University of Denmark,1990.
[7]YANG Ming,WANG Wenlin,YANG Jun,et al.Development of a functional platform for system reliability monitoring of nuclear power plants[J].International Journal of Nuclear Safety and Simulation,2014,5(3):177-185.
[8]LARSSON J E.Diagnosis based on explicit means-end models[J].Artificial Intelligence,1996,80(1):29-93.
[9]韦博成.参数统计教程[M].北京:高等教育出版社,2006:265-274.
[10]彭敏俊,王兆祥.船舶核动力装置[M].北京:原子能出版社,2009:34-35.
[11]WANG Wenlin,YANG Ming,YANG Jun.A monitoring and diagnostic expert system for reactor coolant system[C]//9th International Topical Meeting on Nuclear Plant Instrumentation,Control and Human-Machine Interface Technologies(NPIC& HMIT 2015).Charlotte,NC,2015:2166-2174.
[12]濮继龙.压水堆核电厂安全与事故对策[M].北京:原子能出版社,1995:104-110.
[13]何道侠,周炳鉴,陆雪华,等.SGTR模拟演练[J].中国科技信息,2013(13):41-42.
HE Daoxia,ZHOU Bingjian,LU Xuehua,et al.Simulation for SGTR[J].China Science and Technology Information,2013(13):41-42.
