面结构光的货车侧面防护装置安装尺寸的测量
2015-03-23何洋洋郭天太王英军
何洋洋,郭天太,王英军,孔 明
(中国计量学院 计量测试工程学院,浙江 杭州 310018)
面结构光的货车侧面防护装置安装尺寸的测量
何洋洋,郭天太,王英军,孔 明
(中国计量学院 计量测试工程学院,浙江 杭州 310018)
提出一种基于面结构光的货车侧面防护装置尺寸测量方法.即采用激光三角法原理,利用投影装置产生条纹状结构光,投射到货车侧面,结构光信息被视觉装置采集后由计算机处理,计算机通过结构光的条纹信息,实现货车侧面防护装置及车轮的空间三维信息反演,从而实现货车侧面防护装置尺寸测量.该方法避免了在普通机器视觉方法货车侧面防护装置检测中,由于车轮和防护装置与视觉装置的距离不同带来的测量误差.在系统设计的基础上,搭建了实验平台,进行了实验研究.由实验结果可知,采用本方法的货车侧面防护装置尺寸测量误差小于3 mm,而原有视觉方法测量精度为10 mm,可见本方法的测量精度远高于原有方法.
面结构光;条纹状结构光;侧面防护装置;尺寸测量
货车侧面防护装置是防止行人、骑电瓶车者被卷入货车底部造成重大伤害的重要防护措施,根据相关国家标准,防护装置到货车前/后车轮、车架及地面的距离应小于300 mm、350 mm及550 mm.但是目前国内对货车侧面防护装置安装尺寸的检测方法主要是人工查验,采用钢卷尺或直尺进行测量,来判断是否符合国家标准[1-2].国外主要是根据强度试验装置对侧面及后下部防护装置进行安装尺寸和刚度的检测[3].本课题组前期提出机器视觉方法,对经过收费站的所有货车侧面摄像,并采用图像处理技术实现货车侧面防护装置安装位置的实时检测,提高了检测效率,降低了人员工作强度.但是机器视觉方法检测时,由于货车防护装置、轮胎、车架并不位于同一平面上,存在一定的透视失真,因此测量误差相对较大,为10 mm.因此,本文提出一种基于面结构光的货车侧面防护装置尺寸检测方法,避免了由于车辆构件空间深度的差异带来的透视失真,从而提高了侧面防护装置的检测精度.
1 测量系统结构与测量原理
本实验测量系统由面结构光光源、CCD摄像机两部分组成,其检测原理见图1.

图1 结构光三维测量原理Figure 1 Structured light 3-D measuring principle
为了检测车辆构件的空间位置,系统采用条纹状结构光,条形光的投影位置与车辆构件的三维空间位置相关,通过结构光三维测量原理[4],实现车辆构件位置的三维空间编码;采用CCD摄像机采集信息,根据摄像机的小孔模型[5],CCD成像平面上的点,与经过该点及摄像机光学中心的空间直线相对应,结合编码信号和空间直线可以直接反演出车辆构件上所有点的空间信息,并经计算机进行处理后,获得货车防护装置的安装位置信息.
为了提高检测精度,必须在检测前,对不同测量距离的结构光编码信息及摄像机进行标定[6-7].CCD拍摄点的图像坐标(u,v)(pixels)与其三维空间坐标(mm)之间的转换关系为
s[uv1]T=AM[XwYwZw1]T.
(1)
式(1)中:s—比例系数,A,M分别是摄像机标定后的内、外参数.
通过式(1)可知,图像上的每个像素点对应于三维坐标系中一条直线.因此需要配合面结构光光源的投影线平面,共同匹配出的点的三维坐标.采集的图像解相后,根据CCD的绝对相位值可以求得面结构光光源对应的绝对相位值为

(2)
式(2)中:up—三维点在面结构光光源上绝对相位值,φ—在CCD图像上的绝对相位值,N—面结构光的条纹周期数,W—面结构光在水平方向上的像素值.
被测物体上的P点,对应于光源坐标系中的相位为up的直线.得到三维点在光源上的绝对相位值up后,根据式(1)图像上像素坐标与三维坐标的转化关系,求得其对应的线所在的投影平面.CCD上像素点对应的一条空间直线和面结构光光源上绝对相位对应的投影线平面(图1)的交点即为P点的三维坐标.根据式(1)可以得到空间直线和投影线平面的方程
(3)
式中:U1,U2—空间点在CCD像素平面和面结构光像素平面上的坐标,A1,M1—摄像机标定后的内、外参数,A2,M2—面结构光标定后的内、外参数,X是世界坐标.
实际检测过程见图2,当货车车头进入检测区域时,超声波探测器1的测距值明显减小,发出脉冲,提醒控制器有货车通过,控制器打开结构光光源,并定时发送触发信号,控制CCD摄像机拍摄货车侧面图像,并传送给计算机,由计算机存储并自动识别货车侧面车辆构件信息,实现货车防护装置安装位置的检测.直至超声波探测器2检测到货车车尾离开工作区域,此时检测过程结束.当下一辆车进入工作区域时,各仪器再次工作.
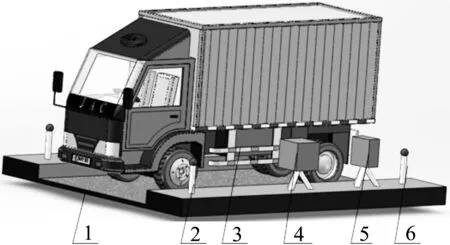
1—工作区域;2—超声波探测器2;3—侧面防护装置;4—摄像机;5—光源;6—超声波探测器1图2 测量结构示意图Figure 2 Diagram of the measuring structure
2 实验研究
2.1 结构光空间编码标定
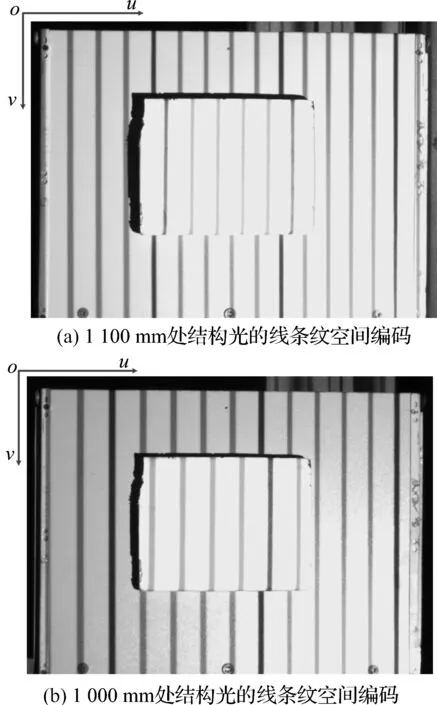
图3 结构光线条纹空间编码Figure 3 Space coding of the structure light stripes
结构光光源发出的各条结构光信息,在不同距离时,其位置及由深度信息引起的变化量不同,因此检测前必须对每一条结构光进行标定.标定采用平板作为遮挡物,标定时必须保证平面遮挡物与CCD摄像机成像面平行.根据车道和车辆的特性,确定深度的标定范围为800 mm~1 500 mm,取深度步长为50 mm,在深度空间中移动平面遮挡物,采集各个标定深度的数字图像,送入计算机进行分类处理.图3是不同距离处的结构光线条纹空间编码.
由图3可以看出,平板在不同的空间位置,其线条纹结构光的位置不同,离CCD摄像机近则条纹的u值大,离CCD摄像机远则条纹的u值小.根据条纹上点的u值就能直接确定该点的空间深度.
前五条条纹深度信息与相移量的对应关系如表1.
表1 拍摄距离与相移量的对应关系
Table 1 Relationships between the shot distances and the phase-shift
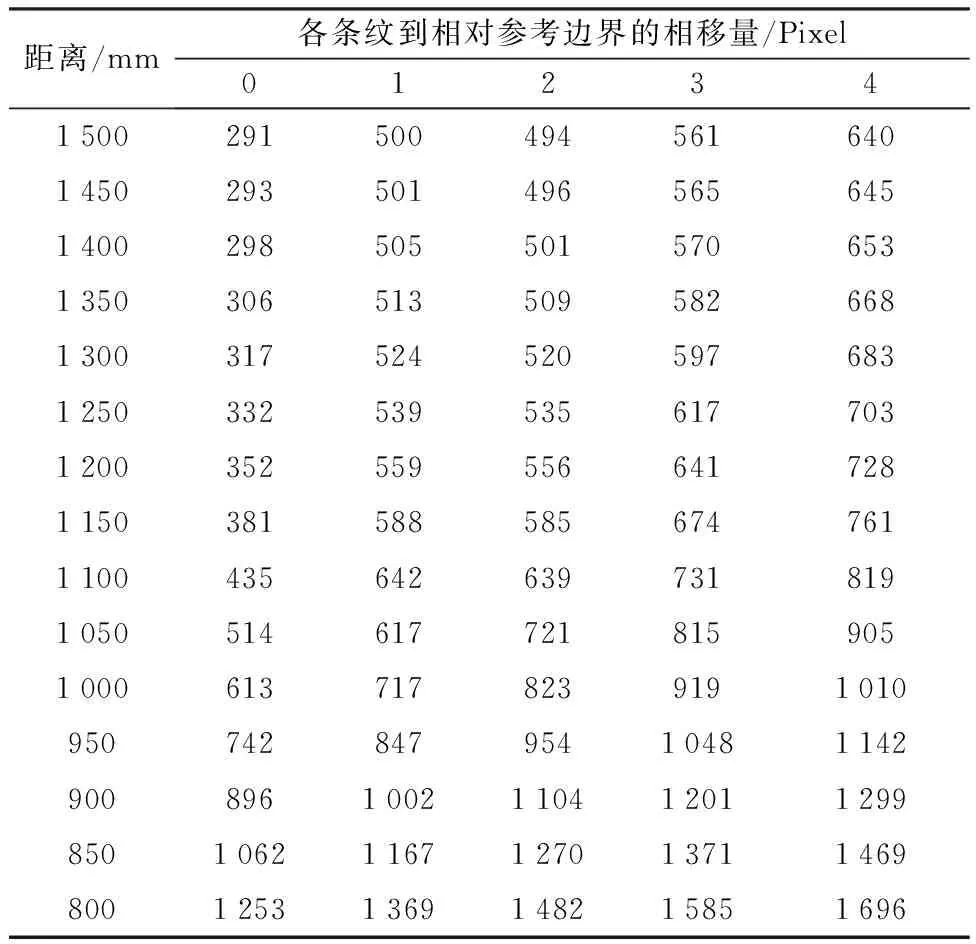
距离/mm各条纹到相对参考边界的相移量/Pixel012341500291500494561640145029350149656564514002985055015706531350306513509582668130031752452059768312503325395356177031200352559556641728115038158858567476111004356426397318191050514617721815905100061371782391910109507428479541048114290089610021104120112998501062116712701371146980012531369148215851696
根据表格中的数据能拟合[8]出各线条纹空间深度和成像位置的曲线,图4是第一条条纹空间深度与成像位置的曲线.

图4 第一条条纹空间深度与成像位置的曲线Figure 4 Curve of the space depth and imaging position of the first stripe
2.2 货车侧面防护装置检测实验
为了验证本文实验方法的可行性,对货车侧面防护装置进行现场检测.实验系统(图1)中CCD摄像机垂直于货车侧面所在平面,两者之间的距离是1 200 mm,且CCD与X轴正向的夹角为90°;激光器光源距离货车侧面也是1 200 mm,且与X轴正向的夹角为150°.实验过程中,首先打开CCD和光源,再进行拍摄静止状态下的货车侧面,然后拍摄人工推动下货车侧面的各个状态信息、并重复推动车辆进行多次拍摄,最后整理各图像信息、分类处理.采用上述实验方案获得的侧面图像如图5.

图5 试验现场图像Figure 5 Image of testing
对CCD摄像机采集的图像进行灰度阈值分割、边缘检测[9]、Hough变换[10]、特征提取等处理,获得车轮、防护栏的准确位置和边缘信息,在这些边缘点上寻找线结构光编码信息,通过线结构光编码信息,获得这些边缘点的空间深度数据,从而实现车轮及防护栏边缘点三维坐标的反演,表2为图5中的A,B,C,D,E,F点的坐标,它们分别代表车轮接触地面点、车轮最右侧点、防护栏最左侧点、防护装置上部最高点、防护装置下部最低点、车架构件最低点.
表2 目标点的三维坐标
Table 2 Three-dimensional coordinate of the objects mm
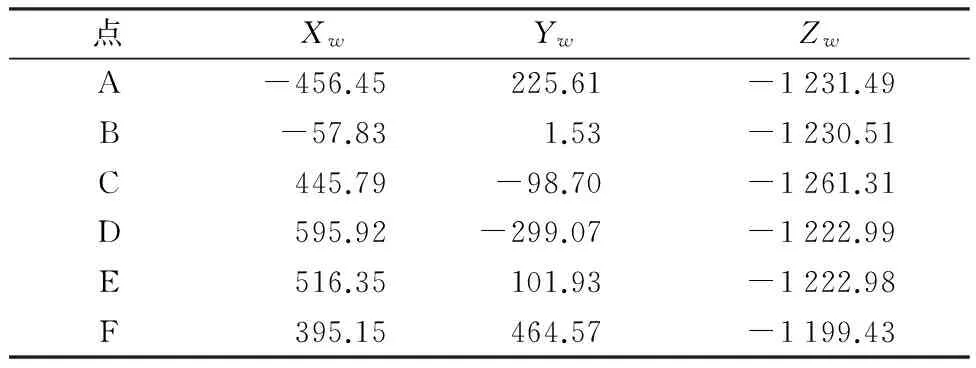
点XwYwZwA-456.45225.61-1231.49B-57.831.53-1230.51C445.79-98.70-1261.31D595.92-299.07-1222.99E516.35101.93-1222.98F395.15464.57-1199.43
通过表2中车轮及防护栏边缘点的三维坐标,可以计算出防护装置到货车后车轮、地面及车架的距离Δx1,Δy1,Δy2.用白光三维扫描仪测得实际距离作为真值,进行对比,其测量结果见表3.
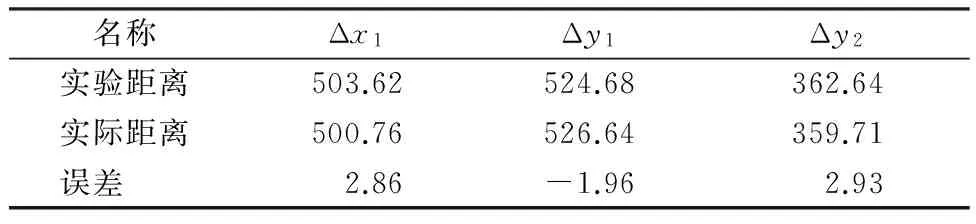
表3 目标物体之间的三维空间距离
从表3可以看出,本次测量尺寸的最大误差为2.93.由于车辆通过车道的位置和角度是不同的,为了对实际情况进行模拟,同一被测货车采用不同位置和角度通过测量位置,10次测量的结果如表4所示,根据表4可知,三个被测尺寸的测量数据,其最大偏差为2.96,最小偏差为0.17,10次测量的平均测量偏差为1.73,标准差为0.73.
表4 重复性实验测量数据及其误差

Table 4 Repetitive experimental data and measurement errors mm
根据上面实验可以看出,本方法采用结构光与CCD摄像机相结合的方法,避免了原有视觉方法测量过程中轮胎、防护装置及车架构件的深度不同带来的透视失真,消除了理论误差,因此测量精度大大提高,采用本方法货车防护装置安装位置测量误差小于3 mm,与本课题组前期提出机器视觉检测方法的测量误差(10 mm)相比[11],本方法测量误差不到原方法30%,如对本方法中条纹的空间深度进行细化标定,并采用亚像素图像处理算法,还可以进一步提高测量精度.
3 结 语
本文提出的面结构光三维测量原理实现了货车侧面防护装置安装尺寸的精确测量,从原理上避免了车身构件的空间位置差异带来的透视失真.
通过多次实车实验,证明采用本方法进行货车侧面防护装置安装尺寸测量时,测量误差小于3 mm,和原方法10 mm的测量误差相比,测量精度明显提高.
[1] 国国家质量监督检验检疫总局.GB11567.1-2001,汽车和挂车侧面防护要求[S].北京:中国标准出版社,2001. AQSIQ.GB11567.1-2001,The protection requirements of the car and trailer side[S].Beijing:China Standard Press,2001.
[2] 程 勇,朱西产.大型载货汽车被动安全性的特点及改进措施[J].汽车技术,2002(2):1-4. CHENG Yong, ZHU Xichan. The characteristics and improvement measures of Large cargo vehicle passive safety[J].Automobile Science & Technology,2002(2):1-4.
[3] 马志雄,吴云强,龚 标,等.汽车/挂车后下部防护装置强度检测平台:中国,202939038.2[P].2013-05-15.
[4] 杜 宪.面结构光三维测量系统的精度研究[D].武汉:华中科技大学,2009.
[5] 涂 波,刘 璐,刘一会,等.一种扩展小孔成像模型的鱼眼相机矫正与标定方法[J].自动化学报,2014,40(4):653-659. TU Bo, LIU Lu, LIU Yihui, et al. A calibration method for fish-eye cameras based on pinhole model[J].Acta Automatica Sinica,2014,40(4):653-659.
[6] 王士明.基于计算机视觉的车辆单目测距系统研究[D].天津:天津大学,2012.
[7] 彭 飞,魏衡华.基于单目仿人机器人的障碍物测距方法[J].计算机系统应用,2013,22(8):88-90. PENG Fei,WEI Henghua. Study on obstacle distance detection based on monocular humanoid robot[J].Computer Systems & Applications,2013,22(8):88-90.
[8] 祝 宏,曾祥进.Zernike矩和最小二乘椭圆拟合的亚像素边缘提取[J].计算机工程与应用,2011,47(7):148-150. ZHU Hong, ZENG Xiangjin. Sub-pixel edge detection algorithm of zernike moments and least-squares ellipse fitting[J]. Computer Engineering and Applications,2011,47(17):148-150.
[9] HAN Xianhua,DAI Shuiyan. Edge detection algorithm based on ICA-domain shrinkage in noisy images[J]. Science in China Series F: Information Sciences,2008,51(9):1349-1359.
[10] JIANG Lianyuan. Fast detection of multi-circle with randomized Hough transform[J]. Optoelectronics Letters,2009,5(5):397-400.
[11] 孔 明,何洋洋,郭天太.图像处理的货车侧面防护装置安装位置的研究[J].中国计量学院学报,2014,12(4):56-62. KONG Ming, HE Yangyang, GUO Tiantai. Study on safety of side protective guards of trucks based on image processing[J]. Journal of China University of Metrology,2014,25(4):385-390.
Installing dimension measurement of side protective guards of trucks based on surface structure light
HE Yangyang, GUO Tiantai, WANG Yingjun, KONG Ming
(College of Metrology and Measurement Engineering, China Jiliang University, Hangzhou 310018, China)
A method to measure the size parameters of the protective guard at the side of trucks was proposed based on surface structure light and the laser triangulation principle.The light stripe structure was projected through a vision device, which was designed to project onto the sides of the truck. The structure light information was collected by the vision device and processed with computer to obtain the three-dimensional information of the truck side protective guard and the wheels. The size of the truck side protective guard could be measured based on the information. The experiment platform was built. The detection error of this method was less than 3 mm, which was superior to that of 10 mm of the original visual method. It suggusts that the new method has higher measurement accuracy.This method avoids the measurement error brought by the distance errors of the visual device to the protective device and the wheels.
surface structured light; light stripe structure; side protective guard; size measurement

1004-1540(2015)02-0161-05
10.3969/j.issn.1004-1540.2015.02.007
2014-12-01 《中国计量学院学报》网址:zgjl.cbpt.cnki.net
国家质量监督检验检疫总局公益性行业科研专项(No.201310116).

TP291
A