基于元胞自动机的海上溢油扩散模拟
2015-03-22彭晓鹃张亦汉
彭晓鹃,张亦汉
(l.国家海洋局南海环境监测中心,广东 广州 510300;2.广东财经大学 地理与旅游学院,广州 510320)
国家经济的高速发展增加了对能源的需求,这促使了国家海洋石油运输和石油开采的发展,也导致了海上溢油事故发生次数的增加,尤其是增大了重特大溢油事故的风险(牟林等,2011)。目前,海上溢油是影响国家的重要环境问题,这类溢油事故在短时间内排入大量的石油到海洋中,对海洋环境、海洋生物以及沿海生态等造成了严重的危害(Ferraro et al,2009;Klemas,2010)。而且这种危害的周期很长,修复过程复杂(Hoff,1993)。例如:2001年底发生在西班牙海域的“威望”号油轮断裂事件和2010年墨西哥湾的钻井平台溢油事故。根据调查与统计,频繁发生的海上溢油事故致使每年有600 万吨石油泄入到海洋中(Shi et al,2008)。因此,许多研究机构相继开展了溢油方面的研究工作,制定一系列的溢油应急策略以最大限度地保护生态环境并减少财产损失。研究表明,准确地模拟并预测溢油的动态变化是制定溢油应急对策和保护海洋生态环境的基础和前提(Abascal,2009;Klemas,2010)。
溢油动态变化是一个非常复杂的过程,不仅受到气象、水文和生物等过程的影响,而且还与石油的性质、溢油的深度、溢油速度等密切相关。传统的溢油模拟方法主要是采用基于物理过程和微分方程的数值模拟,模拟溢油的行为包括漂移、扩散、蒸发、溶解等(Chao et al,2003)。这类方法对于研究溢油变化的机理、掌握其演变规律有重要的作用,但是它们往往比较复杂且参数难与获取(Wang et al,2005)。基于元胞自动机(CA) 溢油模型是一种很好的替代方法,模型可采用多种算法挖掘模型参数、设置转换规则,便可以很好地模拟出全局的溢油变化情况(Karafyllidis,1997; Liu et al,2006)。此外,CA 模型的数据结构与地理信息系统(GIS) 中的栅格数据模型高度一致,能够直观方便地显示、处理和分析模拟结果(Li et al,2002)。Karafyllidis(1997) 首先提出用CA 模型构建溢油扩散模型,在他的模型中,考虑了风力、洋流、边界和蒸发作用等,其理想实验与真实的溢油扩散情景是吻合的。Rusinovic 等(2006) 在Karafyllidis 的基础上着重考虑了溢油的沉降、融解和乳化等作用,并提出了改进的溢油CA 模型。Shyue 等(2007) 则用CA 模型模拟了扩散、蒸发和对流等,模型还考虑了质量守恒原理及溢油运输物理过程。王璐等(2009) 运用CA 建立了污染带扩散漂移规则,对突发性水污染事故进行了模拟,得出了污染物质的漂移轨迹和时空动态变化。李维乾等(2013) 结合元胞自动机和智能体并建立了水污染可视化扩散模型,运用该模型模拟了流域污染物的运移扩散过程。
尽管一些学者尝试用CA 模型模拟溢油的动态变化,但是采用CA 模型研究溢油变化尚处于起步阶段,且已有的溢油CA 研究大多是比较复杂且参数(如:元胞间的溢油扩散系数,蒸发系数等) 难以获取。因此,本文提出利用元胞自动机以研究溢油扩散情景,元胞自动机弥补了传统GIS 所不能动态分析的缺陷,能很好地满足对溢油演变的模拟需求,为更好地理解溢油演化过程及机制提供帮助。本文利用多种算法(如逻辑回归和决策树等) 以挖掘不同的溢油转换规则,并构建了两个不同的CA模型——逻辑回归CA 模型和决策树CA 模型。这两个模型均非常方便且容易使用,在溢油模拟过程中只需设置起始影像、影响因子和模型参数等便可以模拟溢油的动态变化情况。我们把这两个模型应用到DeepSpill 项目的溢油模拟实验中以检验其模拟效果。
1 模型与数据
1.1 元胞自动机及其算法
元胞自动机作为人工生命的理论方法分支,是研究复杂系统非常方便和有效的工具,具有强大的空间运算能力,可有效地模拟复杂的动态系统。它在计算机支持下可以自下而上地对复杂自然系统(如城市扩张、土地利用变化、景观演变等) 进行模拟、预测、优化和显示(Li et al,2011)。本文将运用逻辑回归和决策树分别挖掘转换规则,并构建逻辑回归CA 模型和决策树CA 模型。
1.1.1 逻辑回归CA 模型
逻辑回归CA 模型最早由Wu(2002) 提出来的。该方法对于因变量是二项分类的常量(如溢油区域,非溢油区域) 不满足正态分布的条件下是非常适用的,还可以利用逻辑回归技术对CA 模型的转换规则进行校正。在溢油CA 模型中,设定某元胞t+1 时刻成为溢油元胞的概率为:


其中,r 为 [0,1] 间的随机数,c 为控制随机变量大小的参数,α 为常数项,bk为影响因子的权重,xk为影响因子,如离溢油中心的距离,海风等。
得出元胞发展概率后,还要判断该元胞是否发展为溢油区域:

式中:Pthreshold为阈值,其值域范围一般0~1,γ 为随机变量,β=1/K,K 为迭代次数。
在逻辑回归CA 中,主要需要运用逻辑回归算法对训练样本进行训练以确定各个影响因子(bk)的权重(bk) 和常数项(α)。再把权重和常数项放入到模型中便可以自下而上地模拟出溢油扩散情景。
1.1.2 决策树CA 模型
本文还利用决策树方法构建CA 模型,这种方法对于知识获取困难和不确定的情况下非常实用(Li et al,2011)。运用C5.0 决策树生成算法,它是根据“信息增加的比值”来决定整个决策树的生成。假设训练集数据为S,共有类别C,数据集S的平均信息熵为:
其中,freq(Cj,S)为S 中属于类别Cj的样本数,|S|为样本总数
把S 分解为n 个子集(Si),分解后的平均信息熵为;

分解后信息增加值为:

为了防止产生过多的分解数目,需要对进行标准化,最终得出信息增加的比值为:

其中:

决策树在生成的过程中,必须满足熵的减少值达到最大。运用计算机反复寻找最佳分解,便可以生成决策树。例如:
规则1:
如果 土地覆盖=陆地
则 禁止成为溢油区域
规则2
如果 土地覆盖=海洋
邻近溢油元胞个数>6
离溢油中心小于100 m
则 该中心元胞成为溢油区域
在决策树CA 模型中,需要运用决策树算法对训练样本进行训练,以确定最优的分割因子和阈值,并生成节点和对应的子集。再在子集中确定最优的分割因子和阈值,并生成节点和对应的子集,以此循环直到子集不可再分,便生成了决策树。再把决策树转成if-then 语句,放入到CA 模型中,便可以自下而上地模拟出溢油扩散情景。
1.2 研究区及其数据准备
2000年6月,以美国矿业资源管理局为首的机构联合22 个石油公司共同赞助了“DeepSpill”的大型深海溢油试验研究项目,主要是为了验证溢油模型准确性、检验溢油事故的监测设备以及评估溢油事故应急的安全问题。该项目由挪威SINTEF研究所的科学家Johansen 担任项总指挥,于当地时间2000年6月27 至29日在北海挪威海域Helland Hansen(北纬65 度00 分,东经04 度50分) 进行了实验。实验中以释放氮气和海水以检验设备,随后释放了柴油和天然气混合物、原油和天然气混合物、天然气,并用多种设备记录了其溢油过程(Johansen,2003;廖国祥,2011)。本文选取“DeepSpill”试验中的柴油和天然气混合物的扩张作为案例,进行元胞自动机建模与模拟。
项目收集了来自Far Grip 监测船上的两张清晰溢油影像,分别拍摄于6月27日8 点34 分和8 点40 分。通过解译可以得出两个时间的溢油范围(图1)。其中初始时刻(8 ∶34) 的溢油范围作为模型的初始影像,终止时刻(8 ∶40) 的溢油范围作为CA 模型的检验影像,对比两期影像还可以发现溢油主要朝东南方向扩张并漂移。
溢油具有由中心向外扩张特征(图2a),文中获取了溢油中心点位置,采用欧几里德距离得出距离溢油中心点的距离因子(图2b)。也收集了当时的海风和洋流等信息,海风东向速度和北向速度分别为4.344 m/s 和9.46 m/s;洋流东向速度和北向速度分别为-2.696 m/s 和8.099 m/s,并将它们投影到溢油扩散方向(图2c 和图2d)。利用温盐深仪器(CTD),还得到了溢油地区的海水温度和盐度分布(表层) 情况(图2e 和图2f)。
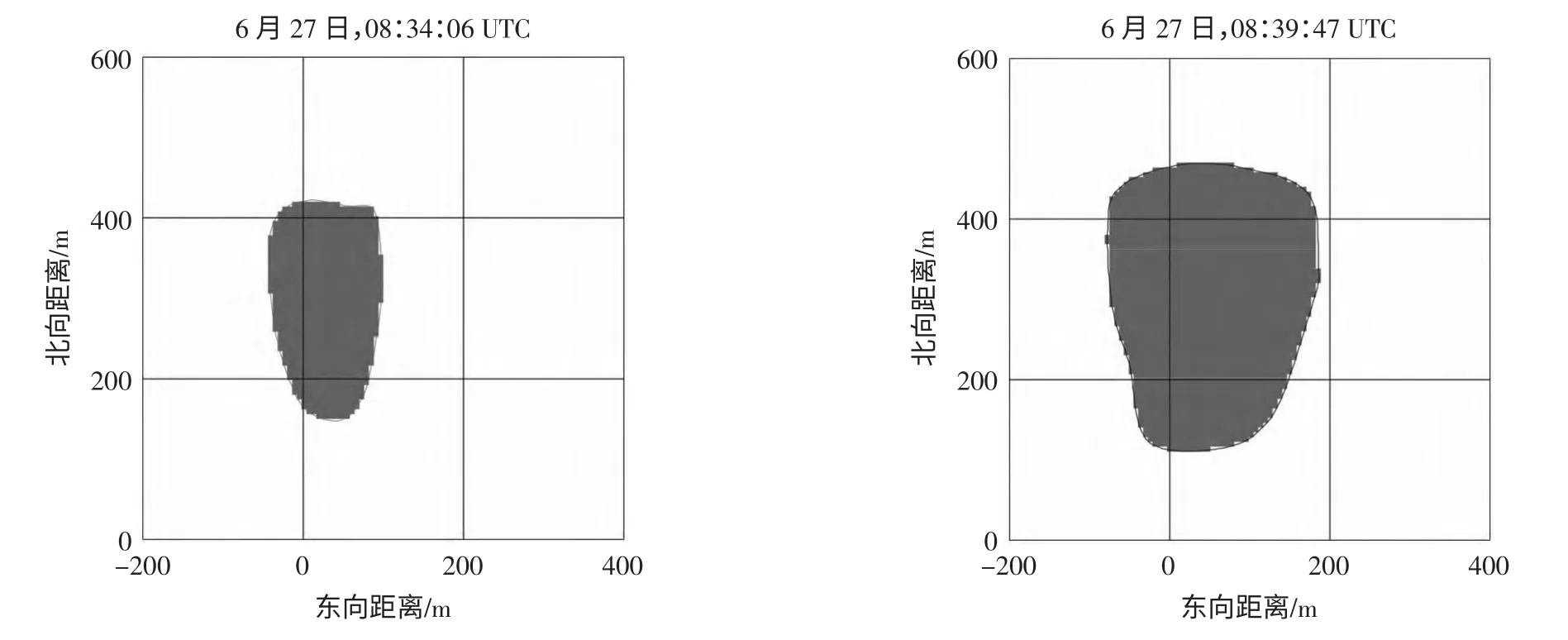
图1 溢油范围图

图2 溢油影响因子
文中采用随机采样方法以获取样本数据,并将样本分成两组,训练样本(用于挖掘CA 的转换规则) 和测试样本(用于检验规则的精度)。样本数量一般为全区的20%(Li et al,2002)。通过使用SPSS 软件对训练样本进行逻辑回归可得到各个变量的权重(表1),各变量的置信度均大于95 %(即,α<=0.05)。在表中,可以看到距离因子的权重为负值,这表明若距离溢油中心越远(值越大),那么成为溢油元胞的概率越小。洋流与海风的权重分别为正值和负值,表明洋流的扩散方向(向东南) 与溢油的扩散方向一致,而海风的扩散方向(向西南) 与溢油方向不一致。盐度、温度和常数项的正负往往具有较大的不确定性,这主要是因为区域内最大最小盐度与温度的变化幅度非常小,分别为0.07 与0.08,而训练样本的微小差别足以改变盐度与温度的权重正负。而常数项则起到平衡作用,要使得各个变量与权重的乘积和加上常数项的结果在一定的范围内(约14.5),因此常数项的变化往往也比较大。对这些权重进行检验,即把这些权重应用到测试样本中。实验发现,测试精度达到88.1 %,满足模型的模拟要求(Li et al,2004)。而对决策树挖掘的规则进行检验,我们发现其测试精度达到了88.5 %,置信度也大于95 % (即,α<=0.05),同样满足后续模拟的要求。

表1 影响因子的权重

图3 模拟结果
2 结果与分析
2.1 参数设置与模拟结果
文中设定模型的起始影像为8 点34 分的溢油范围。模型的影响因子分别为距离因子、海面风场、洋流、温度和盐度(图2),各个因子的权重如表1 所示。设定模拟结果与8 点40 分的溢油范围相等时模型便停止模拟,模型的模拟结果如图3所示。
从图3(a) 和图3(d) 可以,模拟结果是邻域扩张的结果,并没有出现“飞地”或者“岛”的形状,这主要是因为元胞自动机的模拟规则决定的。从公式(1) 可知,若某一元胞的邻域中没有溢油元胞的存在,那么邻域函数值和元胞发展概率均为0,因此不会成为溢油元胞。从图3(b) 与图3(e) 中可知,模拟结果显现出椭圆状,与初始状态相比有较大的变化。而且模拟结果的中心位置已偏离了初始影像的中心位置,这表明溢油受到海风和洋流的影响产生了漂移。而从图3(c) 和图3(f) 则可以看出,模拟结果与验证结果的吻合程度是相当高的,其模拟结果与真实的结果非常相近。
文中通过混淆矩阵计算了逻辑回归CA 模型和决策树CA 模型的模拟精度(表2)。从表中可知,在逻辑回归CA 模型和决策树CA 模型中,对于非溢油元胞的模拟结果,其精度分别为97.7 %和97.8%。但是,这个精度往往与研究区域的大小有关系。若研究区域较大,而溢油区域较小,那么该精度也会很高。而在溢油元胞的模拟结果中,两个模型的模拟精度分别为91.6%和92.1%。该指标能够很好地反映模拟结果中变化部分的精度水平。对于整个研究区,两个模型的模拟总精度可达到96.4%与96.6%。文中也引入了整体对比方法中一个常用的指标——Kappa 系数。该指标常常是用来评价遥感图像的分类精度问题,是评价分类图像和实地调查结果一致性的指标。实验可知,两个模型的模拟结果的kappa 系数达到0.89 以上,表明基于元胞自动机的溢油模拟结果均与实际情况很吻合。

表2 模拟精度及kappa 系数
2.2 溢油预测与分析
根据溢油的扩散方程(庄学强等,2007),我们计算出溢油的扩散面积,并把扩散面积作为结束条件。然后分别运用逻辑回归和决策树CA 模型对溢油范围进行了预测,分别预测溢油10 min(图4a、图4d)、30 min(图4b、图4e) 和60 min(图4c、图4f) 的情景。从图中可以看出,3 个时间段的溢油范围均有明显向东南方向扩张的趋势。随着时间推移,溢油范围不断扩大。在溢油扩散30 min后,溢油的扩散行为有向南扩散的趋势,特别是决策树CA 模型。这主要是受到海风与洋流的影响。当模拟到60 min 后,溢油的范围更大,呈现出中心扩散趋势,特别是逻辑回归CA 模型。这主要是由溢油CA 模型的转换规则决定的,根据公式(1)元胞成为溢油元胞的概率与邻域的溢油元胞个数成正比。模拟到60 min,许多非溢油区域已被溢油元胞包围,相比模拟初始阶段(邻域中只有较少溢油元胞),它们成为溢油元胞的概率显著增加。
2.3 分析与讨论
在模拟效果上,我们对比了决策树CA 模型与逻辑回归CA 模型的精度与kappa(表2),可以发现决策树CA 模型总精度和Kappa 系数分别为96 %与0.899,均比逻辑回归都略微高一点,但是两者没有非常明显的差距。根据Li 和Yeh(2004)研究,决策树CA 模型在模拟效果上会显著地高于逻辑回归CA 模型。在本研究中,两者属地明显主要是因为模拟时间较短、转换量少,两个模型的都能够较好的挖掘出合适的规则,因此两个模型的模拟效果都非常好。
在获取转换规则上,逻辑回归CA 模型通过运用逻辑回归算法得出各个影响因子的权重(如表1),代入到模型中然后进行模拟。这种方法非常容易实现,但是其转换规则仍然是隐藏的。决策树CA 模型的优点是能从大量的空间数据中自动获取明确的转换规则,无需使用数学表达式来定义转换规则,并能在生成转换规则的同时对模型自动进行纠正。该模型能够很好地解决从众多空间变量时获取参数值比较困难的问题。
在样本要求上,两者均不要求训练样本分布是否是服从正态分布,对于其它CA 模型(如:多准则CA) 具有更强的适应能力。逻辑回归CA 模型在对样本进行训练时,一定会考虑各个影响因子对模型的影响,而且每个因子的权重都会有具体的值(如表1)。对于影响比较少,或者没有影响的因子依然会有相应的值。但是本文的决策树CA 模型能够很好地把影响小的因子(盐度和温度) 自动去除,同时也可以采用设置相关的修剪比例(本文设置为5%),使得决策树CA 模型具有更好的泛化能力,避免过度拟合。
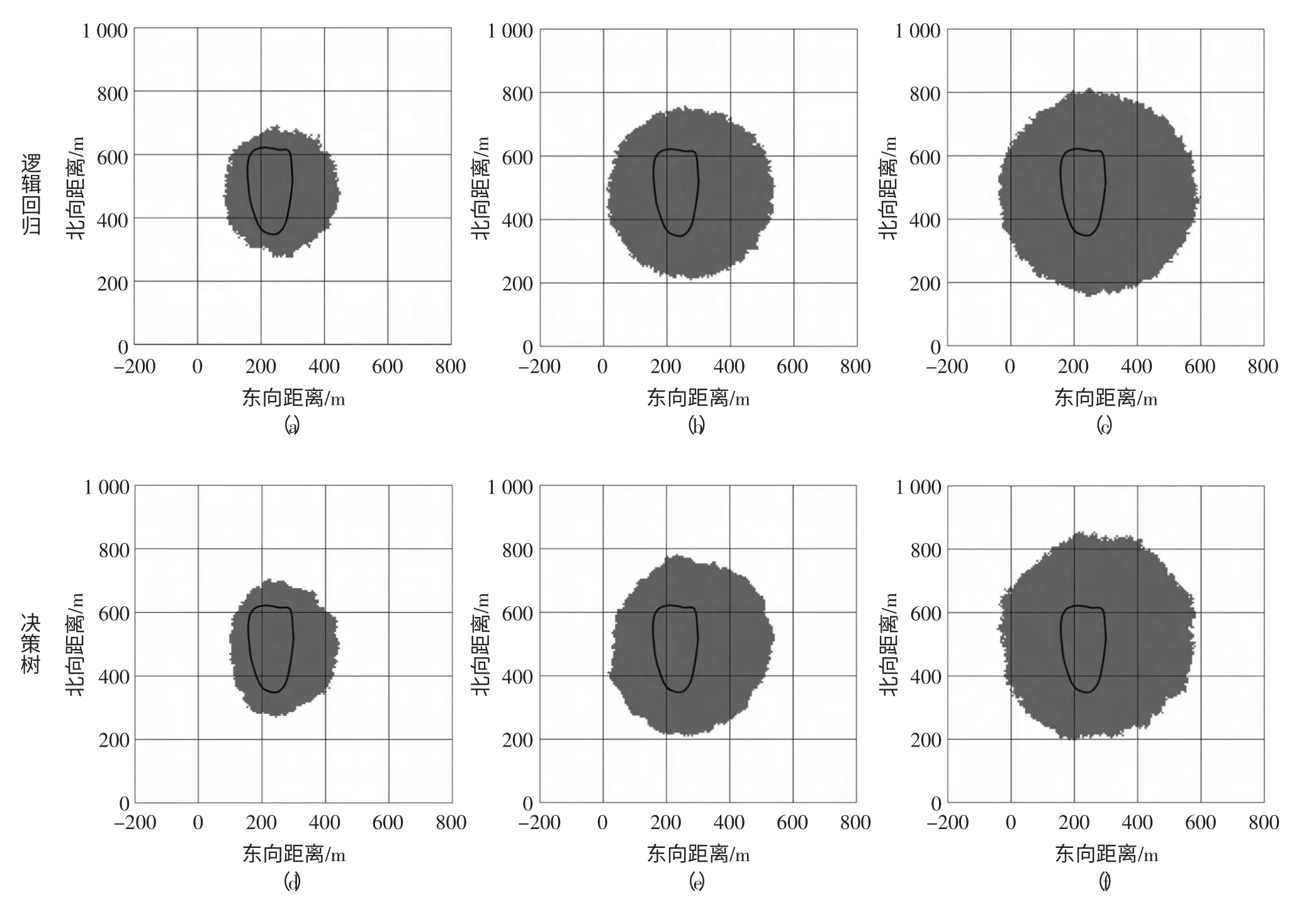
图4 溢油范围的预测
在因子选择上,逻辑回归CA 模型一般情况下需要进行因子相关分析。由于模拟的因子间往往有相关性,在进行模拟前可以进行运用主成分分析或者因子分析等技术进行因子筛选。但决策树CA 模型却不需要进行因子分析等,决策树CA 模型中能够很好地对影响因子进行分析,并在构建决策树时直接除去。在因子选择上,决策树CA 模型具有更强的适应能力,能够很好地去除影响小的相关因子。
在适用范围上,逻辑回归CA 模型能够得出数学上的模型参数,能够很好的描述模型的因子权重大小,模型对于模拟一般地理过程具有较强的适应能力。但是对于复杂的地理过程,决策对CA 模型却能够更好地表达,主要是因为决策树CA 模型在复杂的数据中迅速、准确地挖掘出显式的转换规则,为准确地模拟地理过程提供保障。但是在使用决策树算法进行挖掘CA 模型的转换规则时仍然要注意,需要用连续的决策树算法(如C5 等) 对连续数据进行挖掘。若用非离散的决策树算法(ID3)则有可能会因为实际模拟数据超过训练样本离散边界而导致模拟结果不理想。
3 结论
目前,已有的溢油CA 研究大多是非常复杂且参数获取困难,难以满足溢油应急快速响应的要求。文中使用元胞自动机、逻辑回归和决策树等构建了逻辑回归CA 模型和决策树CA 模型,并把这两个模型分别模拟了“Deepspill”中的海上溢油情景。从使用方面上看,逻辑回归CA 模型和决策树CA 模型能够很方便地获取模型参数,而且对模型的影响因子等没有非常严格的要求。这两个CA 模型只需要通过设置起始影像,影响因子和权重等参数,便可以方便地模拟出溢油的时空变化过程。实验表明使用决策树CA 模型的模拟结果总精度高达96.6%,Kappa 系数高达0.899。而逻辑回归CA 模型的模拟结果模拟精度也高达到了96.4%,Kappa系数达到0.893。通过对比两个模型,还发现决策树CA 模型是能从空间数据中获取明确的转换规则,突破了传统CA 模型只能用数学表达式定义转换规则局限。此外,该模型能够通过自动修剪功能等很好地自动去除影响小的因子,使得决策树CA模型具有很强的泛化能力。由于对训练样本、因子选择的限制少且能够在复杂的数据中迅速、准确地挖掘出转换规则,决策树CA 模型具有很强的适应能力。因此认为基于智能算法的溢油CA 模型能够更能够满足溢油快速响应的要求。
逻辑回归CA 模型和决策树CA 模型可以模拟溢油的扩散过程和漂移,但并没有考虑溢油消失过程。因此,下一步研究工作,将对模型进行改进使得其能模拟蒸发、沉降等溢油行为以适应溢油模拟研究。
Abascal A, Castanedo S, Mendez F J, et al, 2009. Calibration of a Lagrangian transport model using drifting buoys deployed during the Prestige oil spill.Journal of Coastal Research,80-90.
Chao X B,Shankar N J,Wang S Y,2003.Development and application of oil spill model for Singapore coastal waters. Journal of Hydraulic Engineering,129(7):495-503.
Ferraro G,Meyer Roux S,Muellenhoff O,et al,2009.Long term monitoring of oil spills in European seas. International Journal of Remote Sensing,30(3):627-645.
Hoff Z,1993.Bioremediation:an overview of its development and use for oil spill cleanup.Marine Pollution Bulletin,26:476-481.
Johansen Ø,Rye H,Cooper C,2003.DeepSpill--field study of a simulated oil and gas blowout in deep water. Spill Science & Technology Bulletin,8(5):433-443.
Karafyllidis I,1997.A model for the prediction of oil slick movement and spreading using cellular automata.Environment international,23(6):839-850.
Klemas V,2010.Tracking oil slicks and predicting their trajectories using remote sensors and models: case studies of the Sea Princess and Deepwater Horizon oil spills.Journal of Coastal Research,789-797.
Li X,Chen Y M,Liu X P, et al,2011.Concepts,methodologies,and tools of an integrated geographical simulation and optimization system.International Journal of Geographical Information Science, 25(4):633-655.
Li X,Yeh A G O,2004.Data mining of cellular automata′s transition rule.International Journal of Geographical Information Science, 18(8):723-744.
Li X,Yeh A G O,2002.Integration of principal components analysis and cellular automata for spatial decisionmaking and urban simulation.Science in China,Ser.D,45(6):521-529.
Li X, Yeh A G O, 2002. Neural-network-based cellular automata for simulating multiple landuse changes using GIS. International Journal of Geographical Information Science,16(4):323-343.
Liu X P,Li X,Liu L,et al,2008.A bottom-up approach to discover transition rules of cellular automata using ant intelligence.International Journal of Geographical Information Science,22(11):1247-1269.
Rušinoviĉ Z, Bogunoviĉ N, 2006. Cellular automata based model for the prediction of oil slicks behavior.
Shi L J,Ivanov A Y,He M X,et al,2008.Oil spill mapping in the western part of the East China Sea using synthetic aperture radar imagery.International Journal of Remote Sensing,29(21):6 315-6 329.
Shyue S W,Sung H C,Chiu Y F,2007.Oil spill modeling using 3D cellular automata for coastal waters.International Society of Offshore and Polar Engineers.
Wang S D,Shen Y M,Zheng Y H,2005.Two-dimensional numerical simulation for transport and fate of oil spills in seas.Ocean Engineering,32(13):1556-1571.
Wu F,2002.Calibration of stochastic cellular automata:the application to rural-urban land conversions.International Journal of Geographical Information Science,16(8):795-818.
李维乾,解建仓,李建勋,等,2013.基于元胞自动机与智能体的水污染可视化模拟仿真.西北农林科技大学学报(自然科学版),41(3):213-220.
廖国祥,杨建强,高振会,2011.深海环境中溢油输移扩散的初步数值模拟.海洋通报,30(6):707-712.
牟林,邹和平,武双全,等,2011.海上溢油数值模型研究进展.海洋通报,30(4):473-480.
王璐,谢能刚,李锐,等,2009.基于元胞自动机的水体污染带扩散漂移仿真.水利学报,40(4):481-485.
庄学强,陈坚,孙倩,2007.海面溢油数值模拟及其可视化实现技术.中国航海,1:97-100.
