基于LabView的伺服转台Stribeck摩擦测量系统
2015-03-21李玉霞孟浩然
李玉霞,孟浩然,张 斌,王 帅
(中国科学院 长春光学精密机械与物理研究所,吉林 长春130033)
1 引 言
摩擦是影响伺服系统跟踪精度的主要因素,其主要表现为零速附近的速度畸变、极限环振荡等现象,严重影响伺服系统的控制精度[1]。因此摩擦的测量对于伺服转台性能评价及高精度控制补偿器设计具有重要意义[2-3]。基于Stribeck摩擦模型可以表征动静摩擦随速度变化的现象,在实际工程中具有很强的实用性[4-6]。
传统对转台的摩擦测量多是通过数字示波器或采集卡获得数据,数据存储后人工离线在Matlab中进行数据处理及分析,获得最终的摩擦特性曲线,存在不能实时采集分析显示,实验时间长、测试速度慢、自动化程度低的缺点。
本文中利用虚拟仪器技术[7],基于LABVIEW 软件开发了一套摩擦测量系统。可实现对Stribeck摩擦的在线实时测量。将采集参数设置、数据存储、曲线显示及分析集成到一个界面中可实时直观的观测摩擦曲线的动态变化,以实现对转台的摩擦性能进行评价,提高了工作效率。此外,该系统提供了丰富的对外接口,以便今后测量功能扩展及完善。
2 摩擦测量原理及系统构成
2.1 Stribeck摩擦测量原理
转台的摩擦力矩由力矩平衡原理测量,若考虑摩擦力矩的影响,整个转台的力矩平衡方程为:



由电机原理可得,电机输出

其中:Kt为电机扭矩系数,Ia为电机电枢电流。由式(2)(3)可知,摩擦力矩可表示为如式(4)所示:

其中对于一个固定的电机Kt可以认为是个常数,对于一个固定的转台,J 可以认为是个常数。因此只要再测得输出电流Ia和转台运动加速度,便可获得摩擦力矩Tf,同时测量转台速度,便可获得速度与力矩间的关系。
但为能将摩擦力矩应用到控制模型中,需对摩擦力进行建模分析,摩擦力矩与转台运动速度有一定关系,而Stribeck 摩擦描述的是动静摩擦与速度之间的关系模型。该摩擦模型可描述出库仑摩擦、最大静摩擦、黏滞摩擦及和Stribeck 现象,即在宏观滑动阶段下,摩擦力与速度呈非线性变化关系,随着速度的增大,摩擦力经历先下降到一个极小值,而后随速度增大而增大的过程,而此部分为影响转台运动精度的主要原因。用数学模型描述如式(5)所示:

其中:Tf(v)为摩擦力矩,Tc为库仑摩擦力矩,Ts为最大静摩擦力矩,vs为Stribeck 速度,δvs用 来控制Stribeck曲线形状,B 为黏滞摩擦系数,ω 为转台角速度。整个Stribeck摩擦力矩曲线示意图如图1(a)所示,其由库仑摩擦力矩Tc、黏滞摩擦力矩B·ω、最大静摩擦力矩Ts及Stribeck摩擦力矩(Ts-Tc)e- ω/ωsδvs 组成,如图1(b)所示。

图1 Stribeck摩擦力矩Fig.1 Stribeck friction toque
将测量的不同速度下的Tf(v)数据经过非线性拟合处理后,获得Stribeck摩擦模型中的各个参数,描述出摩擦现象。
2.2 测量系统整体构成
由2.1所述,要获得力矩与速度的关系,需要同时电机输出电流、转台式速度、转台加速度、时间数据,再对数据进行处理获得摩擦力矩参数。
整个测量系统的组成框图如图2所示,通过直流电源给转台电机恒定电压,驱动电机匀速转动,利用陀螺测量转台电机的速度,加速度计测量转台运行的加速度,霍尔电流表测量驱动电机的电流。数据采集卡同时获得时间、电流、速度及加速度对数据进行AD 转换,传输数据到PC 机中,利用LabView 进行数据采集、存储、显示并处理。
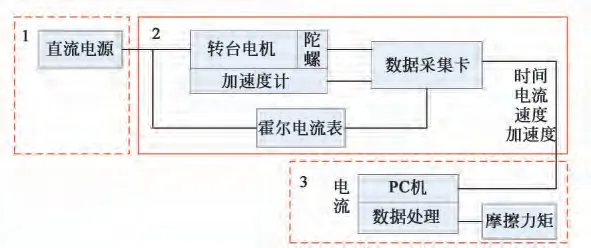
图2 测量系统组成框图Fig.2 Block diagram of measuring system
2.3 硬件系统设计

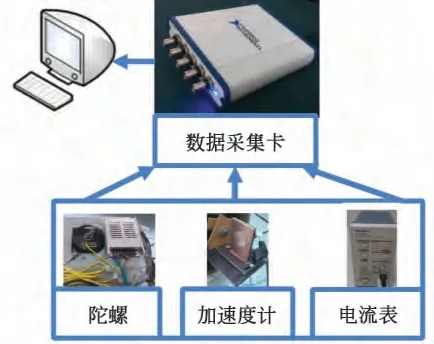
图3 测量系统硬件组成Fig.3 Hardware composition of measuring system
3 软件系统设计
3.1 设计原理及流程
整个软件分为数据采集、数据转换、数据显示、数据分析、数据存储五大模块。数据采集模块将数据采集后,传送到数据转换模块,将采集数据转换为数组、簇或图形的形式,以用来对数据的显示、分析及存储。其中显示模块实现人机交互界面,用户通过界面设置采集参数,分析结果可显示在界面中。分析模块实现摩擦测量数据的后台处理,将数据处理及拟合算法嵌入到分析模块中。存储模块实现对采集数据的存储,用作事后其他数据分析与处理。
3.2 数据采集流程
数据采集模块是整个测量系统的第一步,也是测量系统是否能实现的关键部分,整个采集流程如图4(a)所示,分为以下5部分顺序执行:创建数据采集通道;配置采样定时,确定采样模式和采样率;配置触发;开始任务读取采样;清除任务。其中读取采样数据部分循环执行,可实现连续数据采集。
采用LabVIEW 对USB 4431采集卡数据采集模块编程如图4(b)所示,利用LabView 针对采集卡通讯接口控件,可简捷方便地实现4个通道数据的采集任务。
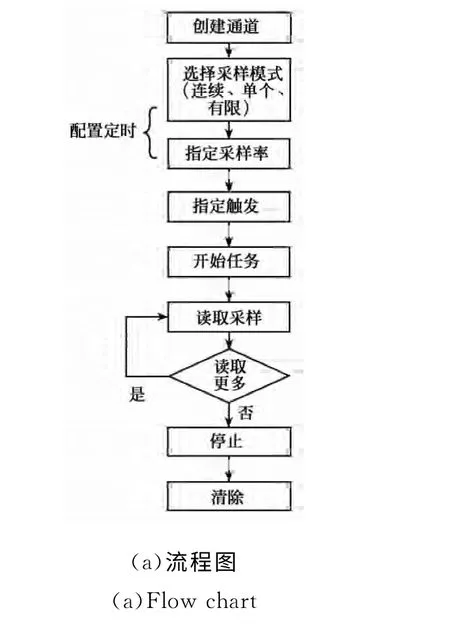

图4 数据采集流程及程序Fig.4 Flow chart and program of data collection
3.3 软件界面
设计的软件界面图如图5所示,由参数设置、分析结果数据显示、分析结果图形显示3部分组成。参数设置部分包括通道参数设置和传感器参数设置。通道参数设置包括采样模式、采样总数及采样率设置。传感器参数设置包括加速度系数、扭矩系数(电流系数)及陀螺速度系数设置。分析结果数据显示部分为Stribeck摩擦模型中的确定摩擦力的4个参数:Tc、Ts、δvs、B。界面的图形显示部分包括所有通道数据、驱动电机转矩、转台速度、电机输出总转矩、速度-干扰力矩关系,电流转矩滤波后信号、速度-干扰力矩滤波后关系及不同速度下干扰力矩有效值关系。Stribeck摩擦力矩参数需通过对不同速度下干扰力矩有效值关系拟合分析获取。而对其他数据的图形显示是为分析处理中对转台工作状况的监测,直观清晰的监测到数据处理中用到的数据,保证分析的正确可靠性。

图5 软件界面图Fig.5 Software interface
3.4 软件发布
为实现在不安装LabView 软件的计算机上运行摩擦测量程序,将软件发布为独立应用程序,程序发布由LabView 中项目管理的程序生成规范实现[8],配置生成程序的各项配置页如图6所示。生成应用程序后,在未安装有LabView 软件的计算机中直接点击应用程序即可进行摩擦力矩测量。
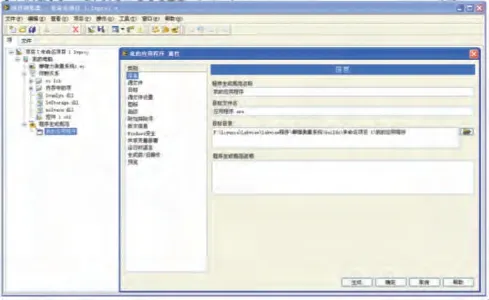
图6 生成程序属性配置Fig.6 Property configuration of creating program
4 实验结果
采用上述摩擦力矩测量软件对一T 型架方位轴转台进行测量,得到速度与干扰力矩关系及拟合曲线如图7所示,依据非线性拟合公式获得各摩擦力矩系数为Tc=0.011 5;Ts=1.682 3;υs=0.083 3;B=0.016 5。
将测量出的摩擦力矩带入原伺服系统模型中,正弦引导下,将仿真与实际测量的曲线进行比较。其中未加摩擦模型的速度曲线如图8(a)所示,加入摩擦模型的速度曲线如图8(b)所示,由图可见,未加摩擦模型的仿真曲线不能反应速度为“0”时的速度畸变,经相关分析,转台仿与实验的速度相关系数达0.99。
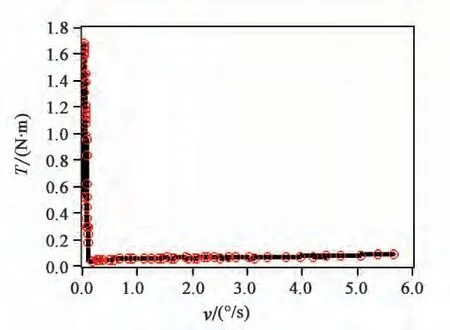
图7 速度与干扰力矩有效值曲线Fig.7 Curve of velocity and disturb toque
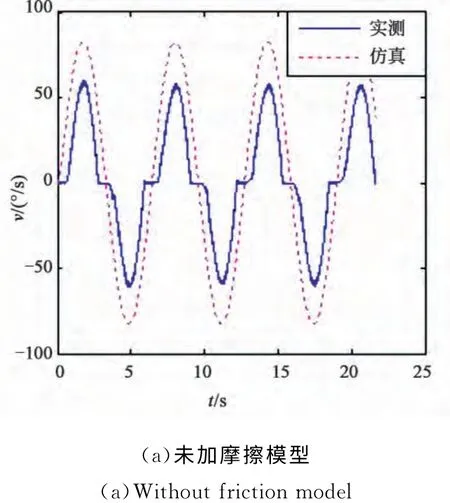
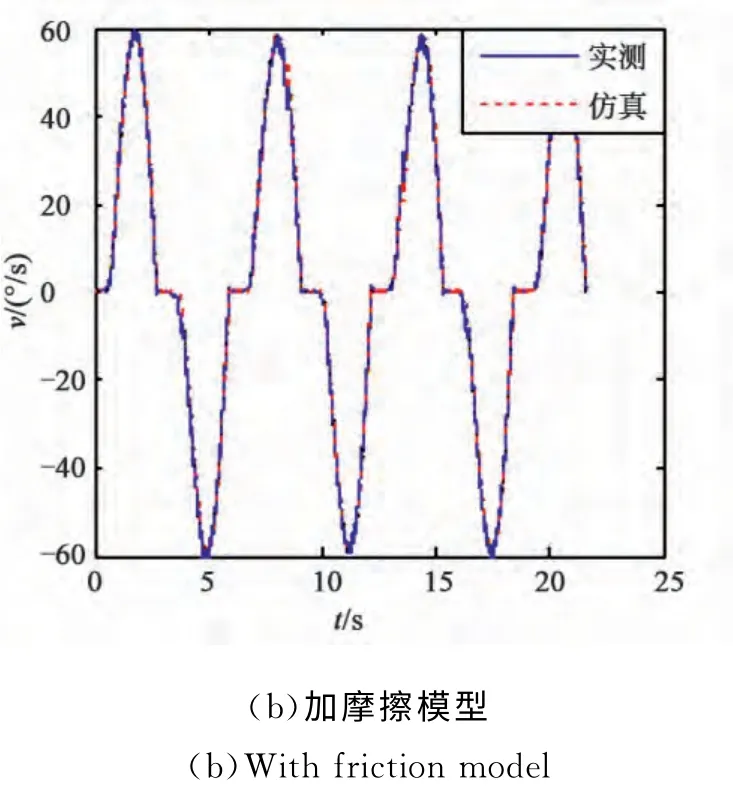
图8 正弦引导下仿真与实验结果Fig.8 Simulation and experiment results in sine guide
5 结 论
基于虚拟仪器技术,搭建了一套摩擦测量系统,实验结果表明,该系统可实时动态显示摩擦与速度间关系,并可计算出摩擦参数,为进一步的摩擦补偿研究及机械特性分析提供了前提。界面操作简单方便,显示信息量大,且直观易读取,提高了工作效率,另外系统提供了丰富接口,可实现进一步的功能扩展,如数据分析、数据存储等。通过软件发布,生成可执行安装exe文件,可在未安装LabView 的计算机上运行,具有很强的实用性。
[1] 宋彦.伺服系统提高速度平稳度的关键技术研究与实现[D].长春:中国科学院长春光学精密机械与物理研究所,2010.Song Y.Study and realization on key technology for improve velocity stability[D].Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,2010.(in Chinese)
[2] Hongliu D,Satish S N.Modeling and compensation of low-velocity friction with bounds[J].IEEE Transactions on Control Systems Technology,1999,7(1):110-121.
[3] Jayesh A,Bernard F,Avraham H.Implementation of a friction estimation and compensation technique[J].IEEE Control Systems,1997(8):71-76.
[4] Candus.C,Astrom K J,Braun.K.Adaptive friction compensation in DC-Motor drives[J].Robotics and Automation,1987,10(6):681-685.
[5] 胡浩军,毛耀,马佳光,等.稳定转台摩擦参数的测量及其对稳定精度的影响[J].光电工程,2007,34(5):5-9.Hu H J,Mao Y,Ma J G,et al.Stabilized turntable friction parameters measurementand the effect on the stabilized accuracy[J].Opto-Electronic Engineering,2007,34(5):5-9.(in Chinese)
[6] Brain A,Pierre D,Carlos C D W.A survey of models,analysis tools and compensation methods for the control of machines with friction[J].Automatica,1994,30(7):1083-1183.
[7] 杨守旺,葛文奇,徐正平,等.音圈电机稳速系统及图形化调试界面设计[J].液晶与显示,2010,25(1):149-153.Yang S W,Ge W Q,Xu Z P,et al.Design of graphic interface and speed control based on VCM [J].Chinese Journal of Liquid Crystals and Displays,2010,25(1):149-153.(in Chinese)
[8] 徐晓东,郑对元,肖武.LabVIEW8.5常用功能与编程 实例精讲[M].北京:电子工业出版社,2009:382-401.Xu X D,Zheng D Y,Xiao W.LabVIEW8.5 Frequently Used Functions and Programming Living Example Detailedly Explanations[M].Beijing:Publishing House of Electronics Industry,2009:382-401.(in Chinese)