风力发电机组偏航控制策略的设计
2015-03-19杜杨超
杜杨超
(太原重工股份有限公司技术中心,山西 太原 030024)
引言
风力发电机组偏航系统的作用是通过偏航电机驱动偏航齿轮,使风轮平面垂直于当前风向,确保风轮最大效率地吸收风能。一个合理的偏航控制策略,应当既能满足对风的要求,又可以保证偏航系统的机械使用寿命。
1 偏航系统组成
风力发电机组偏航系统是风力发电机组整机的重要组成部分,基本硬件组成部分包括偏航轴承、偏航齿轮、偏航驱动电机、偏航制动器、角度传感器等。风力发电机组主控系统根据风向、风速等风况信息,控制偏航驱动电机的运行速度和运行方向,偏航制动器在偏航系统静止时提供足够的制动力矩,在偏航系统动作过程中提供必要的阻尼力矩。由于风力发电机组内电力传输电缆的存在,单方向累积偏航角度达到扭缆极限时,风力发电机组偏航系统需反方向运行,实现扭缆的解缆动作。
2 偏航控制系统
偏航控制系统是风力发电机组主控系统的重要组成部分,用来控制偏航系统偏航动作、解缆动作的执行。基本输入信号包括风速、风向、机舱位置角度、偏航扭缆角度、制动系统压力等,输出信号包括偏航电机控制、偏航制动器控制等。偏航系统应当具有手动控制功能,即忽略机舱位置与风向的偏差,人为控制机舱顺时针/逆时针(俯视)运行,为人工维护提供便捷。
3 偏航控制策略设计
偏航控制系统根据运行模式和运行状态,状态机分为待机、偏航、解缆、手动四个状态。如图1所示。

图1 偏航控制状态机
风力发电机组基本运行状态即为无人值守的自动运行状态,“待机状态!"偏航状态”及这两个状态间的切换是偏航控制策略设计的关键。如图2所示。
机舱位置与风向采用方位角坐标系,正北为0°,两者偏差计算公式为:

其中N为机舱位置方位角,P为风向方位角。
K>0时,风向在机舱左侧位置,偏航系统须逆时针运行;
K<0时,风向在机舱右侧位置,偏航系统须顺时针运行。
1)偏航控制策略A。
实时跟随策略。即机舱位置实时跟随风向的变化。由于风向的不稳定性,偏航系统须连续运行,偏航驱动电机为S1工作制。理论上该控制策略能最大化地保证机舱的对风效果,最高效地捕获风能。但对偏航驱动和偏航制动装置提出了更高的要求。
2)偏航控制策略B。
伪实时跟随策略。即机舱位置并不时刻跟随风向的变化,只有当|K|值超过预设值8°后,偏航驱动才投入运行。该控制策略有效减少了偏航驱动运行时间,但在风况不稳定的地区对偏航系统的设计寿命仍然有影响。
3)偏航控制策略C。
改进的伪实时跟随策略。机舱位置不时刻跟随风向的变化,仅当小风工况(Vwind<7m/s)K值超过预设值16°的持续时间超过120s,或大风工况(Vwind>7m/s)K 值超过预设值8°的持续此件超过60s后,偏航系统才投入运行。该控制策略通过时间参数对风向变化进行有效滤波,进一步减少了偏航驱动运行时间。以上所述如图3所示。
4 偏航控制策略验证
在山西省某风电场3MW风力发电机组上对不同偏航控制策略分别进行验证,对偏航系统运行时间进行比较:
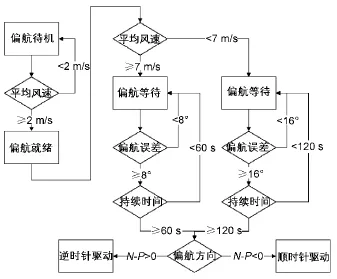
图3 改进的伪实时偏航控制策略
如图4所示,在同一台3MW风力发电机组上对B、C两种控制策略进行比较,对比数据包括机舱方位角、风向方位角和偏航动作状态。两种控制策略分别测试1h。测试结果表明,在风向方位角变化幅值与频率一致的情况下,采用B控制策略,偏航系统动作34次,累计运行时间15.3min。采用C控制策略,偏航系统动作3次,累计运行时间2.4min。B控制策略各次偏航时间较短,平均时间27s,但动作频繁;C控制策略单次平均偏航时间48s,但动作频率有明显的改进。偏航驱动传动装置在风力发电机组20年设计寿命中,参考运行寿命为17 520h。采用C控制策略,20年偏航系统累计运行7 008h,完全满足系统设计的要求。
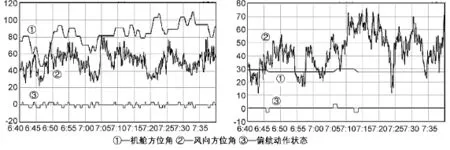
图4 偏航控制策略B与C实测数据
5 结语
通过对不同风力发电机组偏航系统控制策略进行设计、比较和验证,证明改进的伪实时偏航跟随策略是最合理的偏航控制策略。既可以满足风力发电机组的对风要求,又可以保证偏航系统的机械使用寿命。
