机载激光云粒子成像仪研制与校准研究
2015-03-18史晓丁吕明爱张国娟李少波
曾 星,伍 波,史晓丁,樊 冬,吕明爱,张国娟,李少波,周 昕*
(1.四川大学电子信息学院,成都610064;2.西南技术物理研究所,成都610041)
引 言
如何准确了解云系的结构是人工影响天气科学问题的关键[1]。利用飞机直接飞入云系内部进行有效的观测,是近代云物理学一直采用的研究方法。对于云、气溶胶等粒子的微物理观测,最为有效的方法是基于激光技术的直接测量。早在1970年,KNOLLENBERG就介绍了采用线性阵列光电探测器对粒子的投影进行成像,从而测量云与降水粒子谱分布的光电技术,并介绍了几种云粒子成像仪器的测试和发展情况[2]。20世纪70年代,美国PMI公司研制了一套自动化的商用机载云粒子测量系统(particle measurement system,PMS),可自动化连续取样,实现实时记录、处理和粒子成像显示等功能。云粒子成像仪就是该套系统的重要组成部分之一。国外学者对云粒子成像仪行了大量深入的研究,如采用菲涅耳衍射理论分析了透明球体粒子的成像[3];研究了成像仪采样体积的空速校正问题[4];提出了使用4级灰度图像提高云滴尺度估算精度的方法[5];研究了粒子衍射造成的测量误差[6];并通过云粒子成像仪的实际应用进行了误差分析[7-9]。国内气象部门从20世纪80年代开始引进PMS系统,2000年后引进了DMT公司的粒子测量系统,使用云粒子成像仪开展了云微物理的观测和研究[10]。近年来,国内科研单位也开展了一些云粒子探测仪器和云与气溶胶雷达的研究工作[11-15],但少见云粒子成像仪研制的相关报道。
作者报道了一种采用64元高速并行光电探测器测量云粒子尺寸并成像的机载激光云粒子成像仪,可实现25μm~1550μm云粒子谱分布测量;研制了标定装置,通过标准圆点校准了云粒子成像仪,该成像仪在机载测试中获得了云粒子图像。
1 测量原理与系统
1.1 测量原理
激光云粒子成像仪测量原理如图1所示。激光云粒子成像仪采用635nm半导体激光器为光源,64×1线性阵列光电探测器接收信号。当探测区域无粒子通过时,光源始终均匀照射在探测器阵列上。当被测粒子通过探测区域时,经由光学系统成像到探测器单元上形成阴影。在任一时刻,被遮挡的探测器单元记录粒子的一个影像切片并被存储,这样当粒子通过采样区时,将会按照时间顺序依次存储各个影像切片,将此影像切片同步组合,便可以得到完整的粒子2维图像。每个探测器单元有一定的尺度,正比于一定的粒子尺寸,单个粒子所有影像切片组合的最大值即对应粒子的直径。激光云粒子成像仪基于单粒子计数的基本原则,当两个粒子重叠经过采样区时,仪器将无法分辨而造成测量误差,因此采样区长度的需要根据实际云粒子的浓度设计,既要保证有足够的粒子采样率,同时也要将粒子重叠的可能性降到最低。
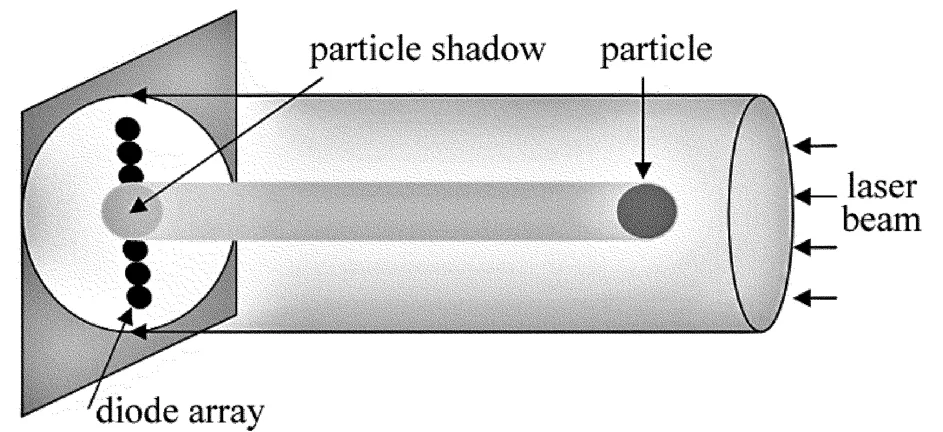
Fig.1 Measuring principle
1.2 系统构成
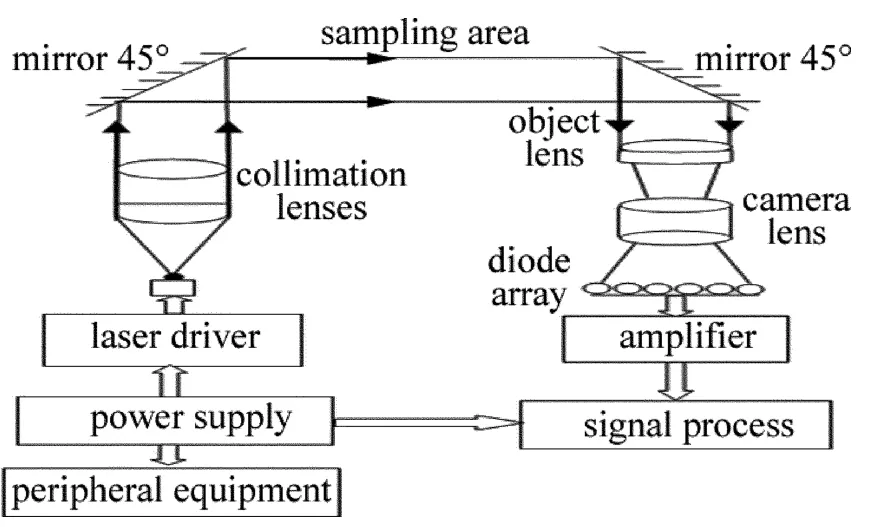
Fig.2 Diagram of cloud particle imaging probe system
激光云粒子成像仪由带尾纤输出的半导体激光器、光发射和接收光学系统、线性阵列光电探测器、数据处理模块以及外围模块组成,如图2所示。半导体激光器波长为635nm,最大输出功率30mW,单模,输出光纤纤芯直径为4μm,数值孔径为0.12。发射光学系统首先将激光准直,然后通过光束整形为强度均匀的光束发射出去。激光束的发散角调试为3mrad,由于整个探测光路长度小于0.5m,而且在设计成像系统时也考虑到了激光束的发散角,因此在采用区内激光束的发散角不会对粒子尺寸的测量产生影响。成像光学系统根据云粒子的大小、像放大倍率及成像系统总长的要求,设计了两个反射镜形成180°转折光路以缩短系统总长,两个反射镜之间的区域为云粒子采样区。采样区长度为80mm,采样面积为120mm2。然后以消色差物镜使光束汇聚,最后通过调节显微成像物镜放大倍率,使云粒子放大后成像在阵列探测器上,且像斑清晰。64元1维线性阵列探测器采用并行输出方式,各个单元探测器同步输出信号,单元探测器的响应时间小于100ns,可以满足云粒子的高速探测要求。单元探测器的宽度为310μm,对应探测最小直径为25μm的云粒子,因此成像光学系统的放大倍率调节为12.4倍。为了消除从采样区边缘通过的粒子的影响,第1个和第64个探测单元不用于计算粒子的大小,因此一共有62个有效探测单元。探测粒子的分辨率为25μm,最大可探测直径为1550μm的云粒子。阵列探测器每个探测单元有一定的尺度,通过计算被阴影遮挡的单元数可得到粒子的尺寸大小,探测单元被遮挡与否的量化标准设定为其面积被遮挡的50%,等于或高于此标准即认为被遮挡,这样也从一定程度上过滤掉了那些尺度不够的小粒子所产生的阴影对测量的影响。无云粒子通过采样区时,激光一直照射在探测器上,各个单元输出直流信号。当云粒子穿过光束采样区时,由于遮挡了部分光束,探测器各单元将根据遮挡情况输出脉冲信号,各单元组合得到的脉冲波形与粒子的大小相关。每一路信号分别经放大器放大后送入数据处理模块进行数字化处理,经现场可编程门阵列中的信号处理电路进行相应计算,计算出粒子的大小,并将不同大小的粒子归入不同粒子尺度通道中,根据探测单元数设置了62个粒子尺度通道。信号处理时通过将各个时刻的信号组合得到粒子的2维图像信息,并临时储存在内存中。在达到规定的采集时间后,数据处理模块将粒子的统计分布以及2维图像数据通过串口发送到控制计算机上进行显示。由于图像数据的存储空间有限,在存储空间装满后就无法继续存储图像信息,直到图像数据向上位机发送并清空内存后才能继续存储。外围模块包括了温/湿度芯片、全球定位系统、空速计,分别获取激光云粒子成像仪所处的环境温度、湿度数据、地理位置信息,以及真空速。真空速数据将送入数据处理模块计算粒子图像,当用于计算的空速大于飞行的实际空速时,将导致数据处理模块过采样,粒子图像被拉长;当用于计算的空速小于实际空速时,将导致数据处理模块欠采样,粒子图像被压短。由于机载设备对系统的稳定性要求极高,在云粒子成像仪的研制过程中,根据适航要求,机械结构外形设计为流线型,云粒子成像仪实物如图3所示。内部设计为高稳定性结构,并对所用的重要光电元器件进行了挑选。根据飞行环境的要求,进行了低温与振动检验。
Fig.3 Photo of cloud particle imaging probe
2 校准实验结果与分析
激光云粒子成像仪需要通过校准的方式调试显微成像物镜的放大倍数,才能保证测量的准确性。校准采用模拟圆形粒子通过仪器采样区的方式。校准装置由校准玻璃圆盘、电机、电机驱动器、调节机构组成。校准玻璃圆盘上制作1组标准圆点,规格为25μm,50μm,125μm,250μm,500μm,1000μm,2000μm,如图4所示。标准圆点都位于同一圆心的圆周上。校准时,通过调节机构使得标准圆点位于云粒子成像仪的采样区内,校准盘转动后,标准圆点依次切割探测光束,在探测器上成像,经数据处理后传输到计算机上进行显示,实时得到了标准圆点的2维图像及单位时间内的尺寸统计分布,如图5、图6所示。
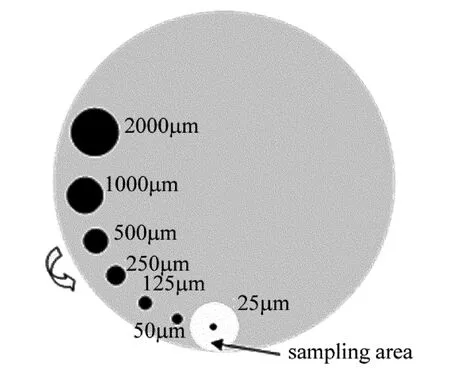
Fig.4 Schematic diagram of a calibrated glass disk
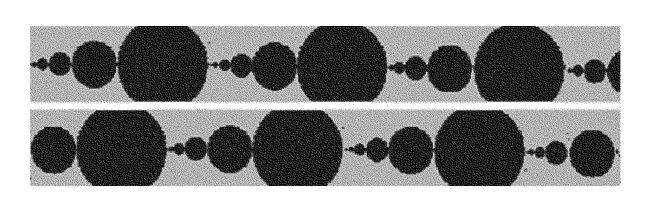
Fig.5 Standard particle image
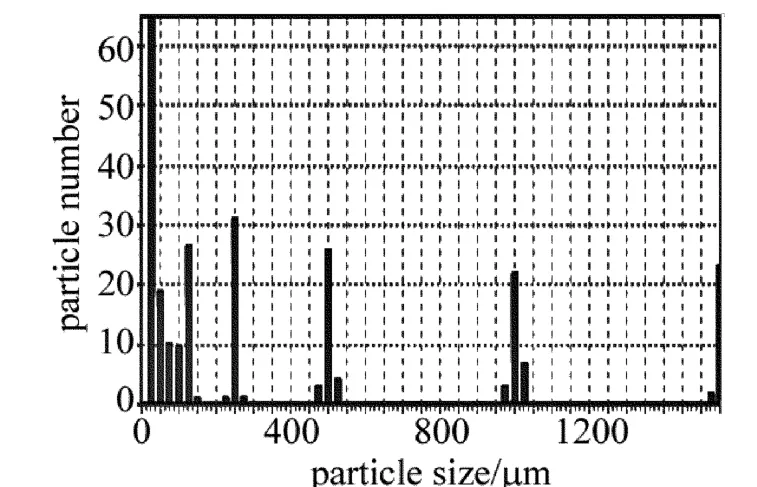
Fig.6 Particle size distribution
图5 是激光云粒子成像仪测量的标准圆点的图像。由于激光云粒子成像仪中缓存空间较小,采用只存储有效的粒子图像的原则,对两个粒子图像之间的无粒子数据不存储、不显示,因此显示的粒子图像是串联在一起的。图6显示的是设定的采样时间内各尺度粒子的个数。纵坐标为粒子数量,横坐标为粒子尺寸,单位μm,最小25μm,最大1550μm,共分为62个通道进行粒子个数的统计。由图6可知,250μm,500μm,1000μm这3种标准圆点的测试结果较好,测试偏差均为±25μm。2000μm直径标准圆点由于超过量程,软件默认尺寸为 1550μm。而 25μm,50μm,125μm 标准圆点由于仪器分辨率的原因,测量结果互相重叠较多,但是从通道的粒子总数分析可知,对25μm,50μm,125μm标准圆点测量是基本准确的,测量尺寸偏差不超过 ±25μm。
2013年10 月,云粒子成像仪安装于山西省人工影响天气中心的运十二作业飞机上,在太原市进行了两次机载探测试验。试验中,飞机飞行的海拔高度最高4100m,机外环境温度最低-4℃。云粒子成像仪在实验中探测到云中粒子,得到了云粒子的谱分布,显示了相应的2维图像,如图7所示。成功对云粒子进行成像,充分说明了云粒子成像仪的可用性,下一步将进行云粒子成像仪与国外同类仪器的机载对比探测试验。
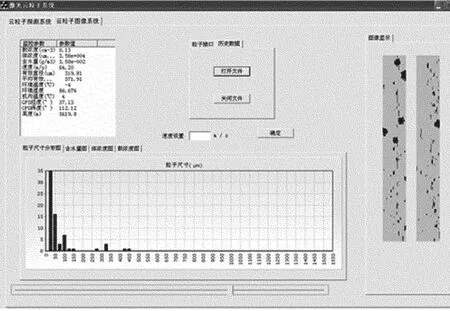
Fig.7 Airborne experiment data
3 结论
研制了一种机载激光云粒子成像仪,采用64元高速并行光电探测器测量云粒子尺寸并通过影像切片的技术实现粒子2维成像。研制了粒子尺寸校准装置,采用7种规格的标准圆点校准实时调试成像光学系统的放大倍数,系统校准后实现了对25μm到1550μm标准圆点的尺寸测量和2维图像显示。在山西省太原市的机载试验中成功探测到云粒子并实现成像。
[1] TAO S W,LIU W G,LI N T,et al.A study of real-time identification of seedability of cold stratiform clouds[J].Quarterly Journal of Applied Meteorology,2001,12(s1):14-22(in Chinese).
[2] KNOLLENBERG R G.Optical array:an alternative to scattering or extinction for airborne particle size determination[J].Journal of Applied Meteorology,1969,9(1):86-103.
[3] KOROLEV A V,KUZNETSOV S V,MAKAROV Y E,et al.Evaluation of measurements of particle size and sample area form optical array probes[J].Journal of Atmospheric and Oceanic Technology,1991,8(4):514-522.
[4] BAUMGARDNER D,KOROLEV A V.Airspeed corrections for optical array probe sample volumes[J].Journal of Atmospheric and Oceanic Technology,1997,14(5):1224-1229.
[5] REUTER A,BAKAN A.Improvements of cloud particle sizing with a 2-D-grey probe[J].Journal of Atmospheric and Oceanic Technology,1998,15(5):1196-1202.
[6] KOROLEV A V,STRAPP J W,ISAAC G A.Evaluation of accuracy of PMS optical array probes[J].Journal of Atmospheric and Oceanic Technology,1998,15(3):708-720.
[7] JENSEN J B,GRANEK H.Optoelectronic simulation of the PMS 260X optical array probe and application to drizzle in a marine stratocumulus[J].Journal of Atmospheric and Oceanic Technology,2002,19(5):568-585.
[8] SMEDLEY A R D,SAUNDERS C P R,WEBB A R.Small-particle size determination by optical array probe oversampling[J].Journal of Atmospheric and Oceanic Technology,2003,20(11):1568-1575.
[9] FIELD P R,HEYMSFIELD A J,BANSEMER A.Shattering and particle interarrival times measured by optical array probes in ice clouds[J].Journal of Atmospheric and Oceanic Technology,2006,23(10):1357-1371.
[10] LIU W G,SU Z J,WANG G H.A new PMS particle detection system and its application[J].Journal of Applied Meteorological Science,2003,14(s1):11-18(in Chinese).
[11] BU L B,SHAN K L,HUANG X Y.Studies on probe of cloud droplet[J].Chinese Journal of Lasers,2009,36(1):216-218(in Chinese).
[12] BU L B,WANG M ,HUANG X Y,et al.Study of cloud droplet probe and its calibration[J].Chinese Journal of Lasers,2011,38(8):0808005(in Chinese).
[13] BO G Y,LIU D ,WANG B X,et al.Two-wavelength polarization airborne lidar for observation of aerosol and cloud[J].Chinese Journal of Lasers,2012,39(10):1014002(in Chinese)
[14] HUANG X Y,CHANG Y N,BU L B.Development on one-dimensional probe of cloud droplet and its data analysis[J].High Power Laser and Particle Beams,2013,25(8):2101-2105(in Chinese).
[15] BU L B,GAO A Z,YUAN J,et al.New cloud droplet probe and its first observation results[J].Journal of Acta Photonica Sinica,2014,43(1):0101005(in Chinese).