基于区域定位与轮廓分割的红外目标检测
2015-03-18张宝华
张宝华,刘 鹤
(内蒙古科技大学信息学院,包头014010)
引 言
基于序列图像的运动目标检测是计算机视觉和图像处理领域的重要研究方向,被广泛应用于视频监控、模式识别、自动控制等诸多领域。可见光和红外图像是目标检测的主要研究对象,可见光图像在夜晚和暴雨、大雾等极端天气条件下,难以有效地检测运动目标;相比而言,红外图像即使在夜晚和光线不足的条件下,也能捕捉跟踪运动目标,因此,基于红外序列图像的运动目标检测受到学者重视。LI在提取感兴趣区域基础上,利用小波分析和支持向量机实现了热红外运动目标检测[1],提高了检测的方法的鲁棒性;ZIN将多特征融合后利用混合特征分析实现了近红外红外目标检测,扩展了检测方法的应用范围[2];GENIN采用基于高斯混合模型的匹配滤波器,实现在非平稳背景下的红外点目标检测[3];ELGUEBALY构造多维非对称广义高斯混合模型实现对红外行人目标进行检测[4]。LI和 WANG 等人[5-6]结合形态学及其改进方法检测红外运动目标,优化了原有方法,检测准确率进一步得到提高。
帧间差分法、光流法、背景差分法等方法是主要的红外序目标检测方法,其中以背景差分法应用最广泛[7-8],通过获取背景模型并比较当前帧与背景模型的差异,检测出序列图像中的运动目标。背景模型的精度决定背景差分法的有效性,若背景建模过程发生场景变动、成像设备颤动等情况,会严重降低图像的对比度和信噪比,影响对红外目标的识别。基于高斯混合模型的背景建模方法,采用多个高斯分量模拟背景信息,根据背景信息变化有效地检测出运动目标,但当高斯混合模型初始化,新模型建立以及学习率不匹配时都会产生虚影现象,为了克服这一缺陷,作者提出了一种基于脉冲耦合神经网络(pulse coupled neural network,PCNN)和高斯混合模型(Gaussian mixture model,GMM)的目标检测算法,通过分水岭算法结合表征目标区域离散像素点的空间信息得到闭合区域,再通过基于PCNN的分割算法消除虚影,最终检测出完整的红外运动目标。
1 高斯混合模型
STAUFFER等人提出了GMM的表达形式[9],能够检测复杂背景下的运动目标,其基本思想是:序列图像中各像素点在不同时刻的灰度值相互独立且具有相同分布,用3个~5个独立高斯分布表示像素点在一段时间内的取值x1,x2,…,xt,从而得到该点的概率分布函数,即P(xt):
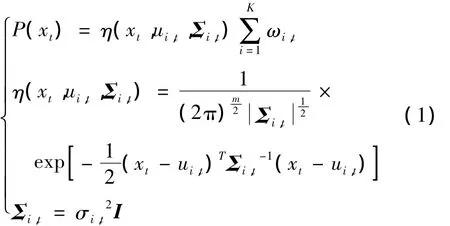
式中,ωi,t表示t时刻像素点属于第i个高斯分布的权重,ui,t为高斯模型均值,T 为经验常数,Σi,t为高斯模型的协方差,σi,t为标准差,I为单位矩阵,m 为当前时刻像素值xt的维数,η为高斯模型的概率密度函数。高斯混合模型在学习过程中根据新一帧的图像信息对权重、均值、协方差更新。将当前时刻像素值xt与K个高斯模型匹配,若xt与第i个高斯模型的差小于2.5倍标准差σi,t,则认为与当前模型匹配,并通过下式更新:
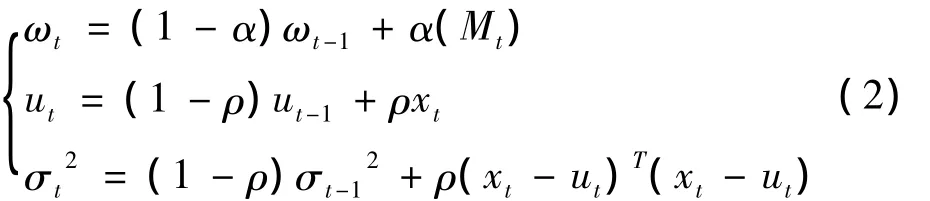
式中,α为学习率,表示运动目标融入背景的速度;ρ为权值;Mt=1时表示匹配,Mt=0表示不匹配。不匹配时,减小权重,且不对均值,方差进行更新。将K个高斯模型按照 ωi,t/σi,t的比值降序排列,若 xt与 K 个高斯模型都不匹配,则把排在最后的高斯模型使用新的模型代替,新模型的均值为xt,标准差和权值分别为初始值。每次更新后,对权值进行归一化处理,使各权重的和始终为1。
由于与xt最为匹配的高斯模型具有最大权值和最小标准差,可以根据与xt的匹配度对K个高斯模型排序,以确定背景区域和运动目标;处于排序靠前的高斯模型对应稳定背景,而靠后的高斯模型对应运动目标。将K个高斯模型排序中的前b个作为像素背景模型B,Q表示背景高斯模型在像素点的概率分布中所占的最小比例,如下式所示:

2 基于GMM的红外目标检测算法
2.1 提取目标区域
红外序列图像(见图1a)受随机噪声干扰严重,由高斯混合模型检测得到代表运动目标的像素点集夹杂部分离散点,因而构成的目标区域不连续,如图1b所示。为了获得轮廓清晰、结构完整的目标区域,需要获取像素点所在区域的外围轮廓信息,外围轮廓对应于序列图像中运动目标边缘灰度值变化剧烈的区域,而图像的空间频率能表示图像中灰度值变化的剧烈程度。所以计算图像的空间频率(spatial frequency,SF)可以准确定位红外目标边缘。首先将原矩阵AM×N围绕边界进行镜像反射扩展为A1,A1=A(M+2)×(N+2)×A(M+2)×(N+2),然后根据下式求出图像的空间频率矩阵C(x,y):
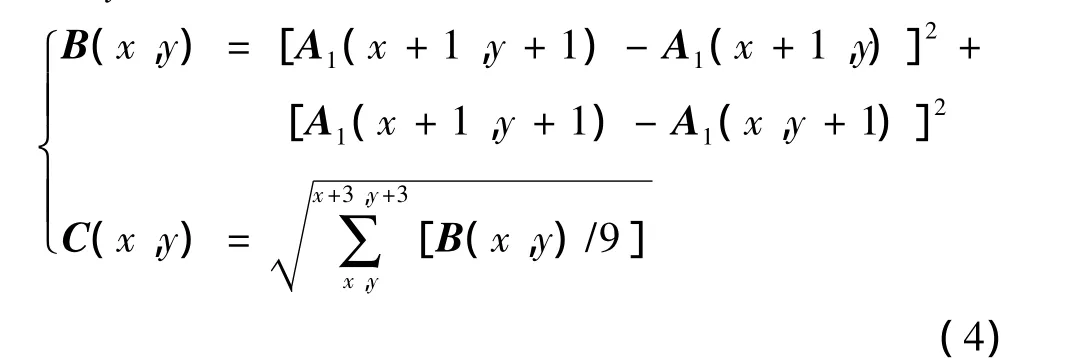

Fig.1 Extraction of infrared closed areaa—original image b—discrete target c—target edge d—closed target
根据图像的空间频率信息可以快速获取图像的边缘,如图1c所示。再通过沉浸法分水岭变换[10],将得到的若干个闭合区域合并为同一区域,实现将离散的像素点合并为闭合联通的目标区域,如图1d所示。分水岭算法运算速度快,因此适合处理序列图像。
2.2 消除虚影现象
虚影现象的产生主要由于以下原因:首先,高斯混合模型的初始化参量大多源于经验值,不同图像取值相同;其次,图像内容剧烈变化时,需建立新的初始模型代替原有模型中排序最低的模型,当前模型就不再可靠;最后,高斯混合模型的学习率过大时,速度缓慢的目标融入背景时,背景更新相对加快,需不断建立新模型代替旧模型。上述现象都会产生虚影现象,无法获取完整的运动目标。
为了消除虚影现象,首先需要选定虚影区域位置,作者利用PCNN能够通过同步脉发放行为获取图像空间特征分布信息的特点,通过计算图像的局部能量,将其作为PCNN的外部刺激,通过脉冲获取图像的点火映射图,点火映射图中不同的点火次数对应不同的灰度范围,灰度值越大,点火往往次数越高,记录像素点的点火次数可以得到灰度值较高的目标区域[11],但由于PCNN有时会过度分割出同样具有较高灰度值的背景区域。将2.1节中得到的运动目标区域与PCNN算法得到的分割目标进行与操作,可以检测出准确的运动目标。
PCNN模型的数学描述可以分为以下步骤。
(1)神经网中各神经元都处于熄火状态:
(2)将分解系数输入网络,通过接收域、调制域和脉冲产生域,逐点计算Uxy(n)和Txy(n-1),并比较两者大小以决定是否产生点火事件。
PCNN在迭代操作过程中的神经元由接收域、调制域和脉冲产生域组成:
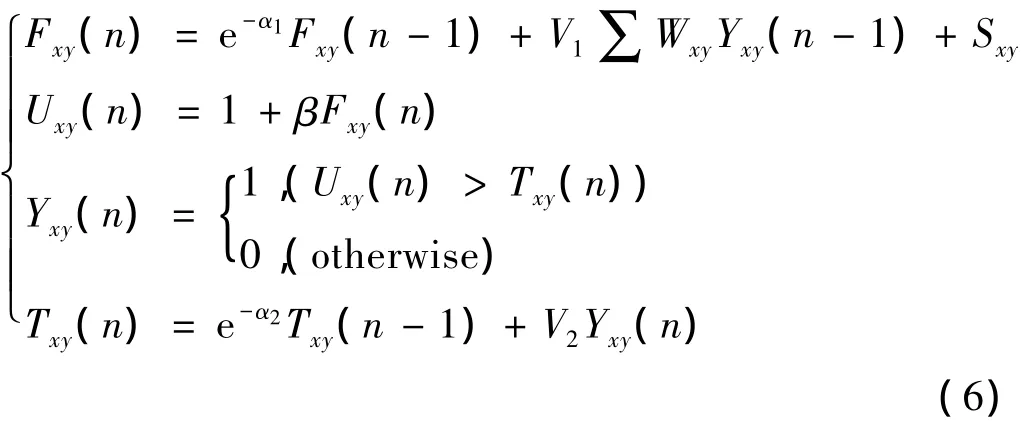
式中,x和y表示图像各像素点横纵坐标值,n代表迭代次数,Sxy代表输入激励,Fxy表示反馈通道输入,Wxy为突触联接权,Uxy表示神经元的内部活动项,Yxy表示神经元的脉冲输出,它的值为0或者1,Txy是动态阈值,V1和V2为归一化常数,α1和α2为调节对应式子的常量,β表示链接强度。如果Uxy(n)>Txy(n),则神经元激发产生脉冲,否则神经元不激发,不产生脉冲输出。
2.3 算法步骤
本算法具体步骤如下:(1)通过高斯混合模型获得代表运动目标的像素点,并将其二值化;(2)计算二值化图像的空间频率,得到目标边缘信息;(3)根据边缘信息,通过分水岭算法,得到闭合的运动目标区域;(4)计算每一帧图像的局部能量,通过PCNN进行分割,获得潜在的目标区域;(5)将高斯混合检测出目标区域同PCNN分割目标区域进行与运算得到当前帧的最终运动目标。图2为本算法的流程图。
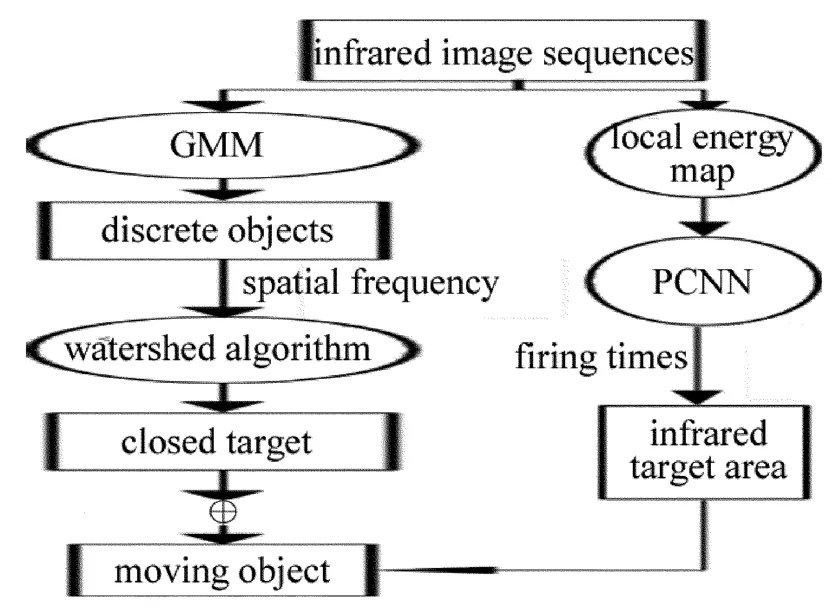
Fig.2 Algorithm flowchart
首先,计算当前帧图像(infrared image sequences)的局部能量图(local energy map),并将局部能量图作为PCNN的激发源获取的每个像素点的点火次数(firing times),根据点火次数可以分割出红外目标区域。同时,再将当前帧图像经过GMM后获取离散的运动运动目标(discrete objects)。然后根据离散目标的空间频率(spatial frequency),获取目标边缘,采用对于边缘信息敏感的分水岭算法(watershed algorithm)实现离散目标的填补,得到闭合目标(closed target)。最后,将PCNN获取的红外目标区域和GMM获取的运动目标进行与计算获取当前帧图像完整的运动目标(mov
ing object)。
3 实验结果及分析
为了验证算法的有效性,通过2组对比实验来证明本算法的效果,实验数据来源于Oklahoma大学Visual Computing and Image Processing实验室。第1组实验如图3所示,序列图像共有300帧,每帧图像大小320pixel×240pixel,图3a为序列图像的第12帧、第17帧、第23帧;图中人物处于运动状态,高斯模型的初始化过程产生了虚影,如图3b所示;通过PCNN对3a进行分割,得到二值化的运动目标区域,如图3c所示,由于背景中部分区域的灰度值和目标灰度值接近,出现欠分割现象。将高斯混合模型获取的运动目标与PCNN分割得到的目标区域进行与运算,得到的二值化图像映射到原始图像图3a中,获得完整的运动目标,如图3d所示,图3f和图3g分别为采用背景差分法和帧间差分法检测到的运动目标,比较图3d~图3f,可看到图3d与原图目标最接近。
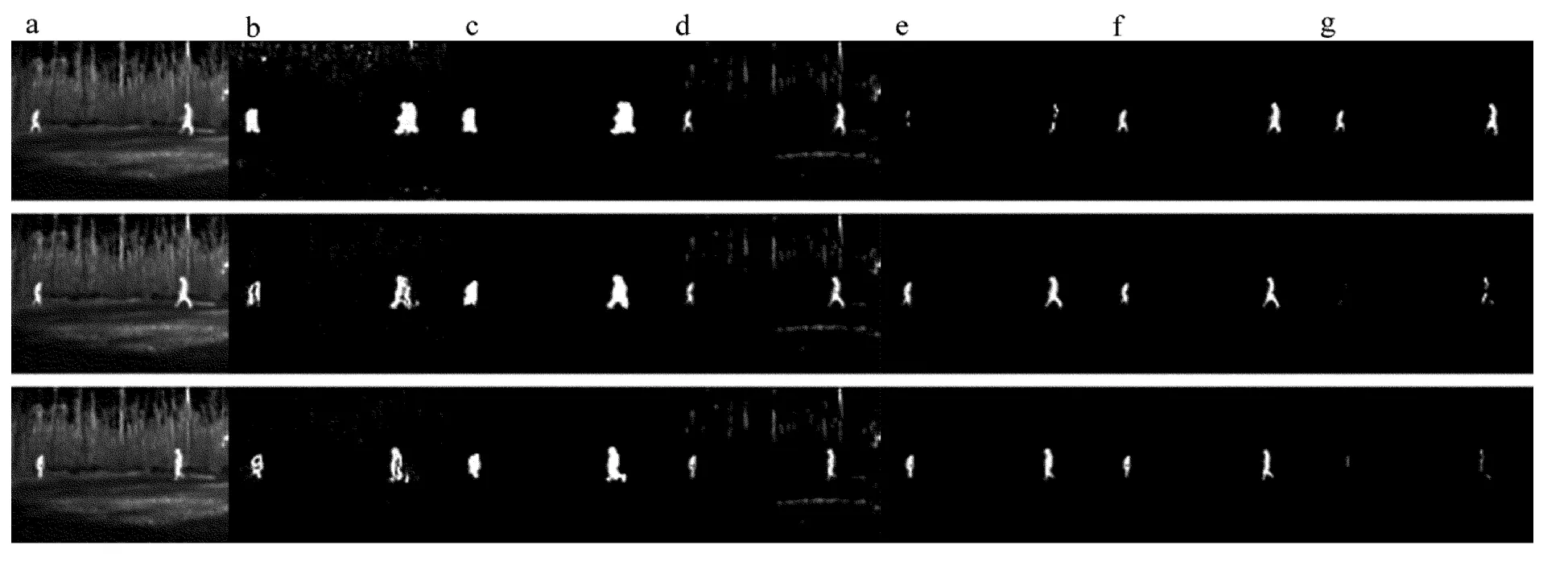
Fig.3 The first set of experimental resultsa—original image b—ghosting target c—closed target d—PCNN segmentation target e—the method in this paper f—background subtraction g—fame difference method
第2组实验如图4所示,序列图像共有258帧,每帧图像大小320pixel×240pixel。图4a为序列图像中的第43帧、第78帧和第112帧,人物从交汇到离开。通过高斯混合模型得到的运动目标如图4b所示,运动目标不是闭合的,伴随着虚影现象。通过分水岭变换,填补目标内部的孔洞如图4c所示,再经过PCNN获取目标区域,如图4d所示,通过与计算得到完整的运动目标,如图4e所示,图4f和图4g分别为采用背景差分法和帧间差分法检测到的运动目标。上述实验中,背景差分法通过比较序列图像与背景图像的灰度差判断运动目标,但是由于背景图像无法实时更新,会产生较大误差。帧间差分法根据相邻两帧图像的灰度差来判断运动目标,对于红外图像而言,由于目标的灰度值近似相等,所以不能准确判断运动目标。通过比较,本文中的方法检测到的运动目标比上述两种方法更加精确。

Fig.4 The second set of experimental resultsa—original image b—ghosting target c—closed target d—PCNN segmentation target e—the method in this paper f—background subtraction g—fame difference method
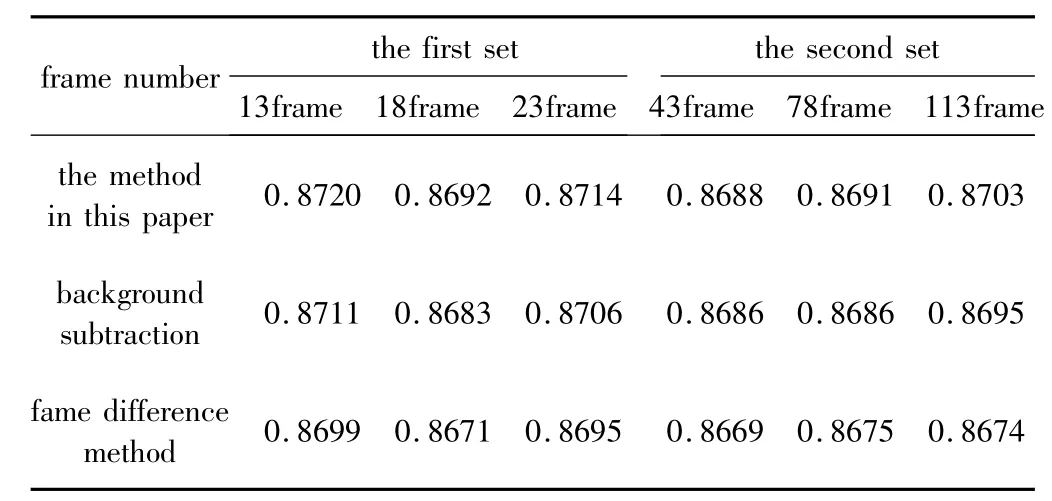
Table 1 SSIM of target region
作者根据客观评价指标对算法进一步做了定量分析。结构相似度(structural similarity,SSIM)表示两幅图像的结构相似度,越大说明越相似。通过将传同方法检测出的红外运动目标和原始图像中红外运动目标分别求取结构相似度,如表1所示,可以看到用作者的方法得到的SSIM高于其它方法,说明了本文中算法的有效性。
4 结论
红外图像受噪声干扰严重,传统的基于高斯混合模型的检测方法效果不理想,作者提出了改进算法,将分水岭算法引入区域检测中,实现对红外目标的定位;再利用PCNN的脉冲激发点火特性消除虚影,实现对红外运动目标的精确检测。实验结果表明,算法能够克服模型初始化参量设置、模型转换等对目标检测产生的不利影响,效果好于传统方法。
[1] LI J F,GONG W G,LI W H,et al.Robust pedestrian detection in thermal infrared imagery using the wavelet transform [J].Infrared Physics& Technology,2010,53(4):267-273.
[2] ZIN T T,TIN P,HIROMITSU H.Pedestrian detection based on hybrid features using near infrared images[J].International Journal of Innovative Computing Information and Control,2011,7(8):5015-5025.
[3] GENIN L,CHAMPAGNAT F,BESNERAIS G L.Single frame IR point target detection based on a Gaussian mixture model classification[C]//Electro-Optical and Infrared Systems:Technology and ApplicationsⅨ.Edinburgh,United Kingdom:SPIE,2012:854111.
[4] ELGUEBALY T, BOUGUILA N.Finiteasymmetricgeneralized Gaussian mixture models learning for infrared object detection[J].Computer Vision and Image Understanding,2013,117(12):1659-1671.
[5] LI Y,WANG J B,LU J J,et al.Single frame infrared image targets detection based on multi-mixture filters model[J].Advanced Materials Research,2012,486(3):1389-1392(in Chinese).
[6] WANG Y Y,ZHANG Y Sh,HE P.Research on IR target-detecting method based on morphology and entropy[J].Laser & Infrared,2012,42(5):513-517(in Chinese).
[7] WANG Y Zh,LIANG Y,PAN Q,et al.Spatiotemporal background modeling based on adaptive mixture of Gaussians[J].Acta Automatica Sinica,2009,35(4):371-378(in Chinese).
[8] WEI Zh Q,JI Y P,FENG Y W.A moving object detection method based on self-adaptive updating of background [J].Acta Electronica Sinica,2005,33(12):2261-2264(in Chinese).
[9] STAUFFER C,GRIMSON W E L.Adaptive background mixture models for real-time tracking[C]//Computer Society Conference on Computer Vision and Pattern Recognition.New York,USA:IEEE,1999:252.
[10] VINCENT L,SOILLE P.Watersheds in digital spaces:an efficient algorithm based on immersion simulations[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1991,3(6):583-598.
[11] ZHANG B H,LIU H,ZHANG Ch T.Medical image fusion algorithm based on texture extraction by means of bidimensional empirical mode decomposition[J].Laser Technology,2014,38(4):463-468(in Chinese).
