USBL定位系统目标模拟软件的设计与实现
2015-03-17郑翠娥
曹 为,郑翠娥,史 铭
(1.海洋石油工程股份有限公司,天津300451;2.哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001)
0 引 言
USBL定位系统发展于20世纪80年代,由于其具有成本低、便携性强、灵活性高和操作简单等优点,在海洋工程、海洋矿产资源、海洋国防建设等领域中迅速得到了广泛的应用[1-2]。USBL定位系统是由换能器基阵、罗经、GPS等多种传感器共同组合而成。其中,通过换能器基阵的测量数据可以解算出目标在基阵坐标系下的坐标,结合罗经和GPS的测量数据,通过坐标旋转和坐标平移,最终得到目标在大地坐标系下的坐标,当目标运动时,能够得到目标的运动轨迹[3-4],具体定位原理在下一节有详细介绍。
其中,换能器基阵得到的定位结果包含定位误差。在USBL定位系统进行坐标旋转与坐标平移的过程中,也会引入GPS定位误差和罗经的角度测量误差,系统的最终定位误差即由这三种误差共同组成[5-6]。因此,USBL定位系统在正式使用之前,需要进行误差性能预报。然而,由于外场检测代价高、花费大、耗费大量人力物力,因此,设计一款用于预报USBL定位系统误差性能的目标模拟软件势在必行。
本文主要介绍了一种用于USBL定位系统误差性能预报的目标模拟软件。首先,简单介绍了USBL定位系统的工作原理以及软件的开发平台。接着,详细描述了软件的设计思路与实现方法。最后,对软件进行了测试,测试结果表明该目标模拟软件能够实现数据的读取、发送,并将定位结果通过显控软件呈现出来,能够满足USBL定位系统误差性能预报和日常维护的需求。
1 USBL定位系统工作原理
USBL定位系统是通过声学定位系统对目标的距离与方位进行估计,得出目标相对于声学基阵的坐标,进而融合GPS与罗经传感器信息将此坐标转换成为大地坐标来达到定位目的[7]。
1.1 USBL声学换能器基阵定位原理
USBL声学定位系统是通过目标的应答信号测量目标在基阵坐标系下的方位角以及目标到基阵中心的斜距来完成定位目的。声学定位系统的工作原理图如图1所示,采用的定位解算方法如式(1)、式(2)

式中,λ为波长;d为阵元间距;φx为x轴相邻阵元接收信号相位差;φy为y轴相邻阵元接收信号相位差。
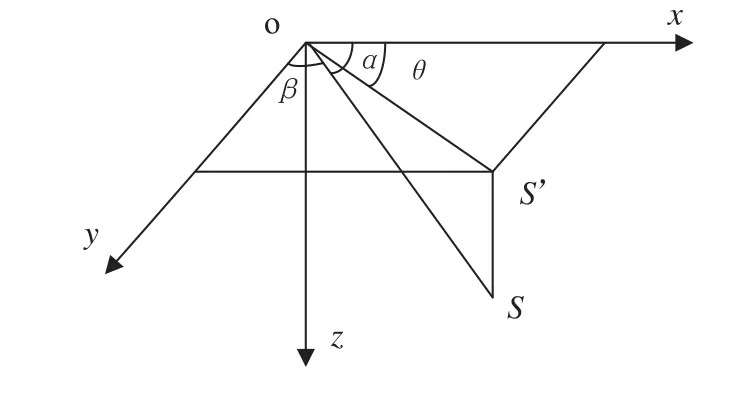
图1 定位原理几何图
根据几何关系得:

式中,R=ct/2,c为水中声速;t为从目标到换能器的信号传播时间。
实际的测量值为φx、φy、c和t。这些量测定之后,目标相对基阵中心坐标系的坐标及斜距就唯一确定了,这样就得到了目标在基阵坐标系上的位置[8]。
1.2 USBL声学系统与罗经传感器数据的融合
如图2所示,USBL定位系统定位过程中共涉及三个坐标系:大地坐标系[G]、载体坐标系[C]、声学基阵坐标系[A]。其中:大地坐标系[G]的N轴指向北方向,E轴指向东方向;载体坐标系[C]原点位于声学基阵中心,X轴指向载体艏向,Y轴指向载体右舷向;基阵坐标系[A]原点位于声学基阵中心,X轴指向十字阵1、4阵元所在直线方向,Y轴指向十字阵2、3阵元所在直线方向;三个坐标系均成左手系[9]。

图2 USBL定位系统坐标定义
其中载体坐标系[C]转换到大地坐标系[G]与基阵坐标系[A]转换到载体坐标系[C]的过程如式(6)、式(7)所示[10]:

罗经传感器能够测得船(艇)的姿态角A、κ、φ。其中,方位角A为水平面内船舷方向与正北方向夹角;纵摇角κ为船舷方向与水平面的夹角;横摇角φ为船的右舷方向与水平面的夹角。
USBL定位系统通过声学定位基阵对应答器目标进行测向、测距,获知应答器在基阵坐标系下的坐标A→XResp。将此坐标通过基阵安装角偏差α、β、γ的修正之后可转化得到应答器在USBL载体坐标系的坐标[8]:

其中C→XResp为应答器在USBL载体坐标系的坐标。再经(6)式转化就可以得到应答器的大地坐标为

1.3 USBL系统与GPS传感器数据的融合
声学传感器与罗经数据融合可以得到目标应答器在USBL载体坐标系下的坐标。进一步修正GPS天线中心与声学基阵中心位置偏差Δ→X,即大地坐标系与载体坐标系的原点偏差,结合GPS测得的载体大地坐标G→Xcarieer,就可以得到应答器的大地绝对坐标为[10]:

2 USBL定位系统的误差性能分析
USBL的声学定位系统测量接收信号的时延与时延差实现对目标的定位。以x轴的定位误差为例,对声学定位公式(4)求偏导[11]得:

从而有位置相对定位精度为:
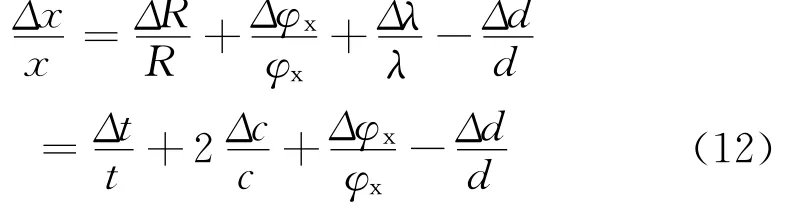
不难看出,声学定位系统的定位误差主要来源于时间测量误差、声速测量误差、阵元间距测量误差和相位测量误差。由于声速误差不大,阵元间距误差主要由安装精度决定,相对误差也可以达到千分之一量级[11],相位差的测量也可以转化到时延差的测量。所以,声学定位系统主要误差源于时延估计误差。这种误差主要来自测距系统自噪声、环境噪声及应答器的收发转换时间差等。
USBL定位系统除了声学定位部分外,在转换到大地坐标系时还需要联合GPS信息、船体姿态信息和系统的安装误差校准的结果,它们都各自会引入误差。
USBL定位系统在大地坐标系下的绝对位置误差与工作的距离无关,在同样的GPS误差条件下,作用距离较小时其对整个定位系统的相对误差影响较大,作用距离较大时其对整个定位系统的相对误差影响较小,在一定的作用距离和定位精度要求下时此误差可以忽略不计[8]。实际上,GPS测量精度则与目标运动情况、数据处理手段、测量基线等情况有关,实际定位精度几厘米至几米不等[12]。
与系统安装的基阵偏角误差给系统定位精度带来的影响类似,船体姿态误差也会影响系统的相对定位精度。当工作距离较大时,在近似条件约束下系统定位精度近似与船体姿态测量误差成线性关系[8]。目前,罗经的测量精度可达0.1°,而纵摇角、横摇角测量精度为0.01°[12]。
GPS的定位误差和安装误差所导致的基阵偏心误差给整个USBL定位系统所带来的系统误差属于绝对定位误差,与应答器到基阵的距离无关。当工作距离较大时,在一定的相对定位精度要求下此两种误差可以忽略不计;在相对较小的工作距离下,同样的误差会给整个定位系统的相对定位精度带来极大的恶化。
斜距较小时,GPS误差与偏心误差对整个定位系统的误差起主导作用,而在斜距较大时,则是声学定位误差、姿态误差与安装偏角误差起主要的作用[8]。
对于USBL定位系统来说,任何一个声学系统安装完成后,都需要对设备进行测试,预报系统性能、分析误差情况和系统可靠性。测试方法为仿真出目标反射的不同时延、不同幅度、不同多普勒的信号,用目标模拟器软件读取仿真数据,通过DA设备转换成模拟信号供USBL声学定位设备采集,解算结果联合GPS数据和罗经传感器数据,解算出目标的位置,通过与真实位置进行比较,给出USBL定位系统的性能。
3 软件开发平台与仪器介绍
USBL目标模拟器软件的开发采用NI公司的LabWindows/CVI平台,该平台久经验证,为工程师和科学家提供了用于创建测试和控制应用的全套编程工具[13]。
NI PCI-6733 DA采集卡是由美国国家仪器公司(NI)开发的采集卡,它具有8条数字I/O线及16位高速模拟输出,每条通道速度达1MS/s,性能优越可靠,可满足大多数的应用需求。目标模拟器选择NI PCI-6733 DA采集卡作为软件与系统信息传输的工具。
4 软件结构和功能设计
4.1 软件的结构设计
软件结构主要包括四部分,如图3所示。读模块实现对满足协议的仿真数据文件的读取;写模块用于发送系统读取的文件数据;显示模块能够同步显示正在发送的数据;自触发模块能够满足设备自触发的需要。

图3 软件结构示意图
4.2 软件功能设计与实现
4.2.1 读写模块及显示模块的设计
用户选择文件成功后,软件依照用户设定的模式读取目标仿真数据,通过DA卡发送给声学定位设备,同时在界面上显示正在发送的信号波形。具体实现方式为:运行软件,选择文件成功后,读取并检查文件名和文件头,如果符合设定的格式,将文件头中的参数信息分别赋给读结构体、显示结构体、写结构体(READ_MODULE、SHOW_MODULE、WRITE_MODULE)。接下来,将文件数据读取到读缓存后,再分别写进写缓存和显示缓存。利用写结构体中的参数设置DA任务将数据分8路发送;利用显示结构体中的参数设置显示模块,在显示控件上显示用户选择的任意4路信号。读模块、显示模块和写模块之间的同步由多线程技术(靠事件进行同步)实现。
4.2.2 自触发模块的设计
目标模拟器软件能够实现DA设备的自触发和外部触发。自触发模块能够创建自触发线程,将用户设定的自触发参数读到自触发结构体中,根据自触发结构体中的参数控制DA设备,实现设备自触发。系统开始自触发任务后进入循环等待,直到用户终止数据回放或改变触发方式为止。
4.2.3 文件读取的顺序/循环读取功能的设计
软件能够实现文件的顺序读取和循环读取功能。实现方式为:对用户选择的数据文件的文件名(如图4)进行分解,提取主文件名和文件索引值。文件索引值赋给初始文件索引变量(StartFileIndex)和当前文件索引变量(CurrentFileIndex)。在按初始文件名读取文件后,对文件当前索引值(CurrentFileIndex)自加1,再与主文件名组成下一个要读取文件的文件名,实现文件顺序读取。在文件的循环读取模式下,依照文件顺序读取模式在所有文件读取完毕后,将文件的初始索引变量(StartFileIndex)值赋给文件的当前索引变量(CurrentFileIndex)值,与主文件名重新组成初始选中文件的文件名实现文件的循环读取。
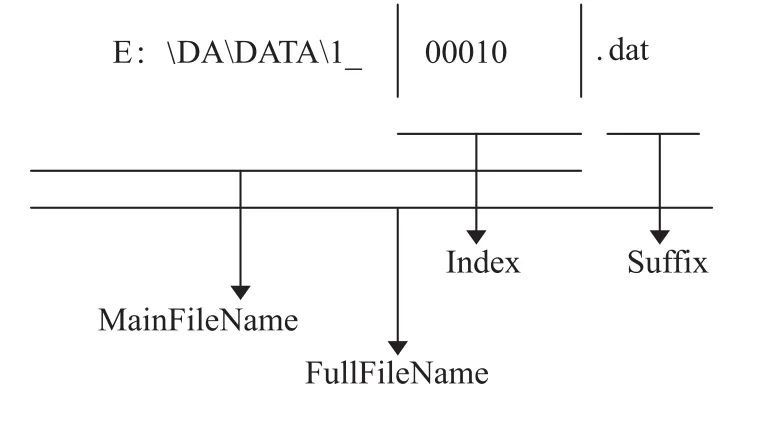
图4 文件名分解图
5 软件的测试结果
在实验室环境下对软件进行了测试。用Matlab仿真出8路不同时延的原始信号波形数据,利用软件读取仿真数据并控制DA设备将读取的数据发送到USBL声学换能器基阵的AD采集部分供系统进行采集和定位解算。
图5、图6为Matlab仿真出的目标反射到声学换能器基阵的原始波形。

图5 原始仿真波形数据(1-4路)
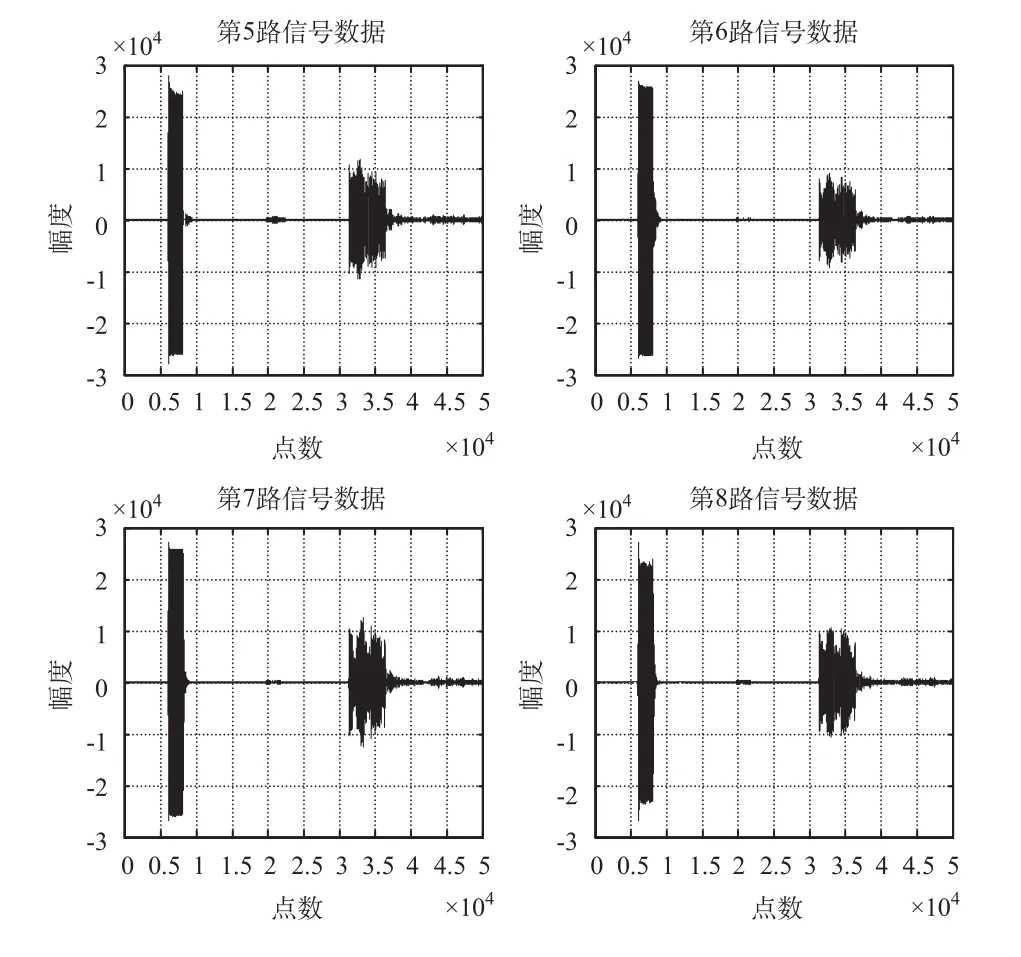
图6 原始仿真波形数据(5-8路)

图7 读取文件数据效果图(1-4通道)

图8 读取文件数据效果图(5-8通道)
图7 和图8为目标模拟器在外部触发、顺序读取模式时读取仿真数据到显控平台的测试效果。
大量实测结果显示,USBL目标模拟器软件能够完全、较快地读取仿真信号文件数据,在界面上显示任意4路信号数据,控制DA设备发送8路信号数据,供USBL声学定位设备对原始波形进行采集、解算。解算结果再与GPS传感器数据和罗经传感器数据融合,解算出目标的绝对位置,能够很好地完成USBL系统的定位性能的测试。
[1] Morgado M,Oliveira P,Silvestre C.Tightly coupled ultrashort baseline and inertial navigation system for underwater vehicles:An experimental validation[J].J.Field Robotics,2013,30:142-170.
[2] Vesin Anne,Hel′ene,Tonchia A.Rigging of a USBL Transceiver for Use on a Seismic Vessel[C].Oceans-San Diego,2013:1-3.
[3] Kim Kihun,Choi Hyun-Taek,Lee Chong-Moo.Underwater precise navigation using multiple sensor fusion[C].Underwater Technology Symposium (UT),2013 IEEE International.2013:1-4.
[4] Miranda M,Beaujean P,Dhanak M.Homing an unmanned underwater vehicle equipped with a DUSBL to an unmanned surface platform:A feasibility study[C].O-ceans-San Diego,2013:1-10.
[5] Chen Hsin-Hung,Wang Chau-Chang,Jang Jia-Pu,et ɑl.On the estimation of roll alignment error of an ultra short baseline navigation system[C].10.1109/UT.5774133,2011:1-8.
[6] Willemenot E,Morvan P-Y,Pelletier H,Hoof.A,etɑl.Subsea Positioning by Merging Inertial and Acoustic Technologies[C].OCEANS 2009-EUROPE.2009:1-8.
[7] Liu Kaizhou,Li Jing,Guo Wei,etɑl.Research on the navigation system of a class of underwater vehicle based on USBL[C].OCEANS 2011,2011:1-6.
[8] 郑翠娥,孙大军.USBL定位系统安装误差校准技术研究[J].计算机工程与应用,2007,43(8):71-173.
[9] 郑翠娥.USBL定位技术在水下潜器对接中的应用[D].哈尔滨:哈尔滨工程大学,2008.
[10] Zheng Cuie,Li Zhao,Sun Dajun.Study on the Calibration Method of USBL System Based on Ray Tracing[C].OCEANS'13 San Diego.2013:1-4.
[11] 田 坦.水下定位与导航技术[M].北京:国防工业出版社,2007:30-31.
[12] Sun Dajun,Zheng Cuie,yong Jun,et al.Initial study on the precision evalution for ultra short baseline positioning system[C].Oceans-St.John's,2014:1-7.
[13] 马少泽.水下航行器测控系统控制软件的设计和实现[D].哈尔滨:哈尔滨工程大学,2010:7-8.
