基于离散DBN的多UAV协同对海突击目标优先等级评估*
2015-03-15韩玉龙孙守福
韩玉龙 林 云 陈 榕 孙守福 高 武
(海军航空工程学院 烟台 264001)
基于离散DBN的多UAV协同对海突击目标优先等级评估*
韩玉龙 林 云 陈 榕 孙守福 高 武
(海军航空工程学院 烟台 264001)
针对UAV编队在遂行对海突击作战任务时面临的目标选择难题,从目标体系的角度出发,围绕目标价值性、目标威胁性和攻击可行性三个方面构建了基于离散DBN的目标优先等级评估模型的网络结构。设计了一个对海突击作战想定,利用Netica软件对模型进行了仿真,完成了对海上目标的优先等级排序。通过仿真算例验证了模型的有效性,仿真结果可以为UAV部队对海突击训练和作战提供参考。
无人机; 动态贝叶斯网络; 对海突击; 目标优先级; 评估
Class Number TP391
1 引言
海上作战环境日益复杂,多UAV编队遂行对海突击作战任务需要应对的目标种类和数量都越来越多,受UAV数量限制,不可能对敌方所有目标进行攻击。如何确定目标的优先等级,形成突击目标清单,成为对海突击作战任务规划的重要任务。
多UAV协同对海突击目标优先等级评估是指根据编队指挥所的作战企图和战场态势、我方所掌握的目标信息资料、UAV及其武器系统的性能,对敌海上目标进行全面分析、对比,从中选取最应该和最适合打击的目标并进行排序,即从整个敌海上目标体系中确定最需要并且最适合UAV打击对象的一种决策活动[1~2]。
2 离散DBN理论概述
很多随机现象,例如战场环境的变换、语音的产生以及连续变化的视觉图像等,都涉及一些随时间变化的随机变量。而标准的贝叶斯网络仅能对静态系统进行建模。为对此类动态过程进行表达和推理,引入了动态贝叶斯网络(Dynamic Bayesian Networks,DBN)的概念[3~4]。
DBN是以概率网络为基础,将静态贝叶斯网络结构与时间信息相结合,形成具有处理时序数据能力的随机模型,即DBN是一组随时间扩展的贝叶斯网络模型。2002年美国伯克利大学的Murphy在其博士论文”Dynamic Bayesian networks:Representation,inference and learning”中给出了离散DBN的完整定义以及相关的理论框架,目前,该论文也已经成为DBN在实际应用中的理论框架。
离散DBN中每段时间间隔下的贝叶斯网络称为时间片。其中,每个时间片可包含多个时刻,也可为一个时刻,相邻时间片的间隔由实际任务情况决定。要使用贝叶斯网络来表述这一随时间扩展的过程,需得到随机变量X[1],X[2],…,X[n]的概率分布,但这样一个分布是十分复杂的[5]。因此,为了能够对复杂系统进行研究并建立相应的模型,需要做一些假设和简化条件处理。假设条件如下:
1) 动态概率过程具备马尔科夫性,满足P(X[t+1]|X[1],X[2],…,X[t])=P(X[t+1]|X[t]),即未来时刻的概率与过去时刻无关,只与当前时刻有关;
2) 每个时间片内网络结构平稳一致;
3) 相邻时间的条件概率过程平稳,也就是说P(X[t+1]|X[t])与时间t无关,能够方便地得到不同时间的转移概率。
在上述假设条件下,DBN由以下两部分组成:
1) 先验网络B1,是一个定义在初始状态X[1]上的联合概率分布。
2) 转移网络B→,是一个定义在变量X[t]与X[t+1]上的转移概率P(X[t+1]|X[t])(对所有t都成立)[5~6]。
(B1,B→)组成的DBN是对应于变量X[1],X[2],…,X[∞]上的半无限网络结构。在实际计算中,只考察一个有限的时间段1,2,…,T,并将离散DBN展开到X[1],X[2],…,X[T]上的一个网络结构。在时刻1,X[1]的父结点是那些在先验网络B1中的结点,在时刻t+1,X[t+1]的父结点是那些在时刻t和时刻t+1中的都相关的在B→中的结点。

(1)
同样可以计算出DBN中任一结点的联合概率分布律为
(2)
3 离散DBN推理算法
离散静态贝叶斯网络可以根据多个时刻的观测值来对系统的状态进行定性推理,能够将各个时刻的观测值相互补充和修正,来处理观测值的不确定性,进而增强推理结果的准确性。
首先,贝叶斯网络以及DBN推理的依据是贝叶斯公式:
(3)
一个具有n个隐藏结点、m个观测结点的静态BN,根据BN的条件独立特性,得到其推理公式:
p(x1,x2,…,xn|y1,y2,…,ym)=
(i=1,2,…,n;j=1,2,…,m)
(4)
xi表示观测变量Xi的一个取值状态,而yj表示观测变量Yj的取值。pa(Yj)表示yj的双亲结点集合。在式(4)中,分母求和符号∑下x1,x2,…,xn表示隐藏变量的一种组合状态。分母的是对观测变量组合状态以及隐藏变量组合状态的联合分布求和,实际是计算确定的观测变量组合状态的分布。
上述静态贝叶斯网络随时间发展就得到T个时间片的DBN,由于观测值只有一种组合状态,因此在此观测值下隐藏变量的分布为
p(x11,x12,…,x1n,…,xT1,xT2,…,xTn|y11,y12,…,y1m,…,yT1,yT2,…,yTm)
(5)
式中:i=1,2,…,T,j=1,2,…,m,k=1,2,…,n。xij表示Xij的一个取值状态。第一个下标表示第i时间片,第二个下标表示该时间片内的第j个隐藏结点。yij表示观测变量Yij的取值。pa(Yij)表示Yij的双亲结点集合。分母求和符号∑下x11…x21…xT1…xTn为隐藏变量的一种组合状态。这是一切离散DBN推理算法的本质[8]。
4 基于离散DBN的目标优先等级评估模型网络结构
贝叶斯网络的网络结构式表示条件独立性信息的一种自然方式,网络中的每个结点都表示特定域中的一个变量,结点间的连接(有向弧)表示相互间因果关系,体现了领域知识性方面的特征。建立目标优先等级评估的离散DBN模型需要首先确定其网络结构,据此,本文从目标价值性、目标威胁性和攻击可行性三个方面建立网络结构[3]。
4.1 目标价值分析模型
对于多UAV编队来说,目标价值体现在固有价值(Int)和体系价值(Sys)两个方面。其中,目标的固有价值,又可以从经济价值(Eco)、政治价值(Pol)和心理价值(Psy)三个方面进行刻画。而目标的体系价值,需要充分考虑目标在整个目标体系中的地位和作用,可分为关键结点(Key),重要结点(Imp)以及普通结点(Gen)。通过上述分析,建立基于离散DBN的目标价值分析模型。
目标价值分析模型中,各结点变量的状态集合可表示为:目标价值(Val)={高(H),中(M),低(L)};目标经济价值(Eco)={高(H),中(M),低(L)},目标的政治价值(Pol)={高(H),中(M),低(L)},目标心理价值(Psy)={高(H),中(M),低(L)};目标的体系价值(Sys)={关键结点(key),重要结点(Imp),普通结点(Gen)}。
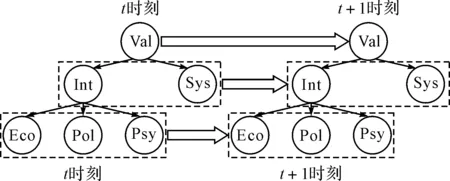
图1 目标价值分析模型
4.2 目标威胁性分析模型
在海战场,目标的威胁可以从三个方面体现。 1) 目标速度。不同的目标通常具有不同的作战速度,即使同一海上目标,速度不同,威胁度也不同。一般来讲,在一定的海域内,目标的速度越快,对我威胁越大。 2) 目标航向。由目标航向可大致判断敌海上目标之意图:若驶向我方编队,则进攻意图明显,若敌驶离我方编队,则逃跑意图明显。 3) 目标距离。通常情况下认为,目标距我越近威胁越大。
该模型中各结点变量的状态集为:目标威胁(Thr)={高(H),中(M),低(L)};目标速度(Rate)={高(H),中(M),低(L)};目标航向(Cou)={驶向(Tow),并行(Par),驶离(Lea)};目标距离(Dis)={远(Far),中(M),近(Clo)}。
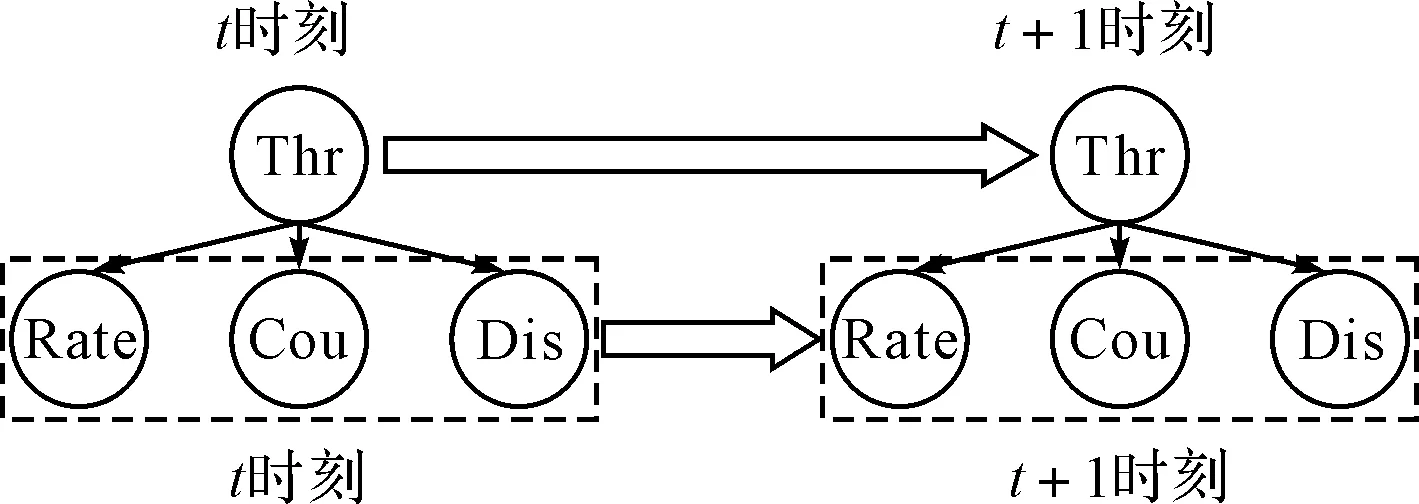
图2 目标威胁性分析模型
4.3 目标打击可行性模型
UAV是对选择目标进行突击的执行者,因此,UAV的作战能力是对海突击目标选择的落脚点,所以要充分考虑我UAV对目标进行打击的可行性。
目标打击可行性可以从目标易损性、机动性和反击能力三个方面来描述。目标易损性是指目标在敌对环境杀伤下丧失全部或部分作战功能的可行性。目标易损性又分为战术易损性和结构易损性。战术易损性是指目标被对方红外、雷达或其他探测器探测到的可能性。结构易损性是指目标在被探测到的条件下,受弹药的毁伤作用时被击毁的可能性。从分析可以看出,目标易损性表示了发现目标和对目标实施毁伤难易程度。目标的机动性越强,稳定跟踪目标并且达成射击条件的难度越大;目标的反击能力反映了其在遭受攻击时对对方进行防御和反击的强度。目标的机动性和反击能力越强,对其实施毁伤的难度越大,打击的效费比越低,目标打击的可行性越低。
因此,从目标易损性(Vul)、目标机动性(Man)和目标反击能力(Con)三点出发建立目标打击可行性模型。

图3 目标打击可行性分析模型
定义模型中结点变量的状态集为:目标攻击可行性(Fea)={高(H),中(M),低(L)};目标易损性(Vul)={高(H),中(M),低(L)};目标机动性(Man)={高(H),中(M),低(L)};目标反击能力(Con)={高(H),中(M),低(L)}。
4.4 目标打击选择模型
在建立价值分析模型、目标威胁分析和目标打击可行性分析模型的基础上,依据各网络结点的因果影响关系,最终构建出目标打击选择模型。其中,根结点目标选择优先等级(Pri)={高(H),中(M),低(L)}。
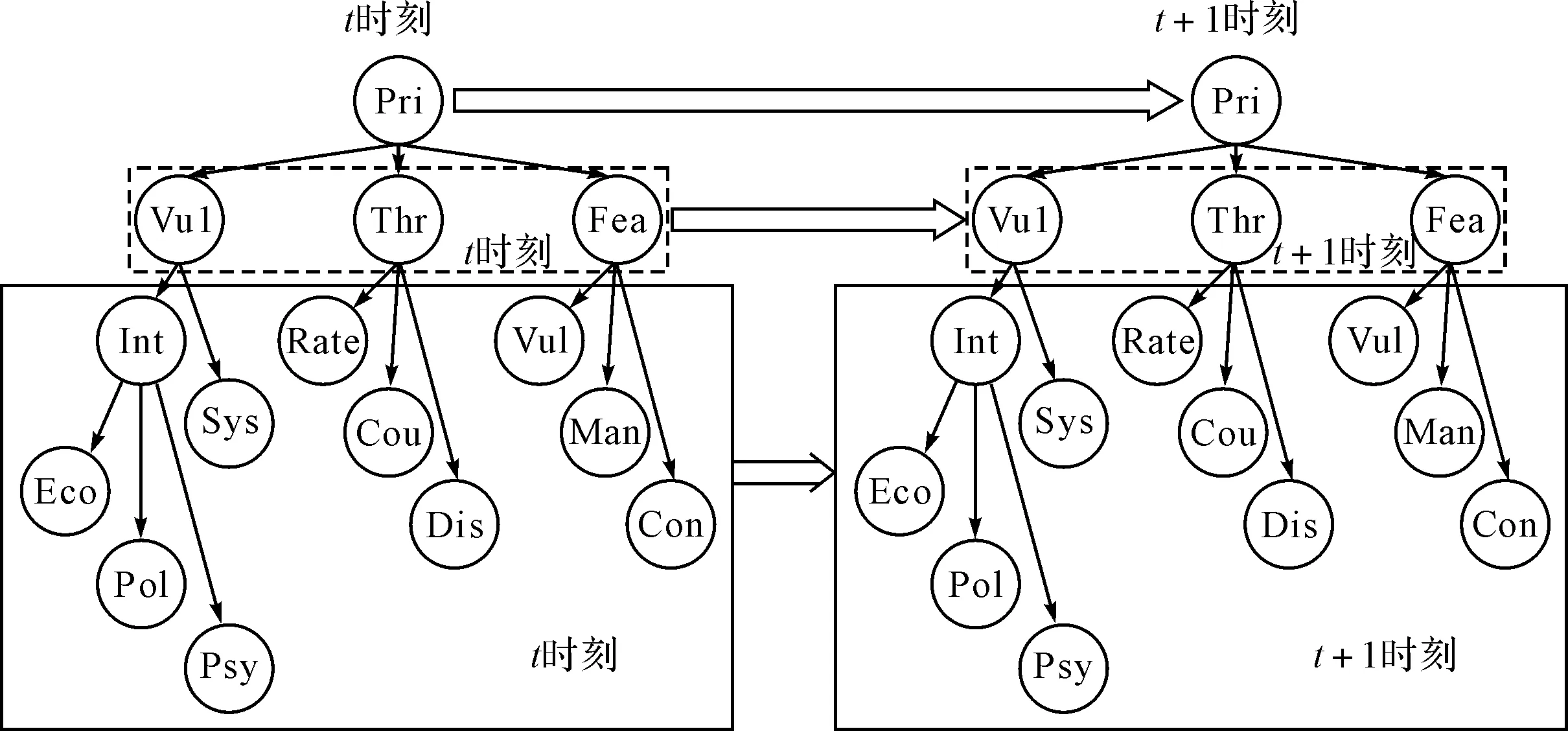
图4 基于DBN的目标选择网络结构模型
5 构造条件概率表
建立了基于DBN的目标选择模型以后,需要构造条件概率表。条件概率表的建立要综合多方面的海战场信息,同时还要考虑军事专家的建议,也可以对经验数据进行统计学习来获得。
对于没有父结点的结点,需要对其赋予一个初始状态的概率。如果一个结点中的变量赋值相同,则表明对于这个结点没有得到任何可供参考的信息。父结点的多少直接影响着条件概率表的复杂度,为了降低其复杂度,可通过减少父结点的数量或增加中间结点来减少一个变量的父结点的数量。对于复杂的网络构造,通常采用增加中间结点的办法降低条件概率表获取的复杂度[9]。
对于图4建立的离散DBN目标优先等级评估模型,给出以下条件概率表,表1~表5,以及状态转移概率表6。

表1 条件概率表(一)
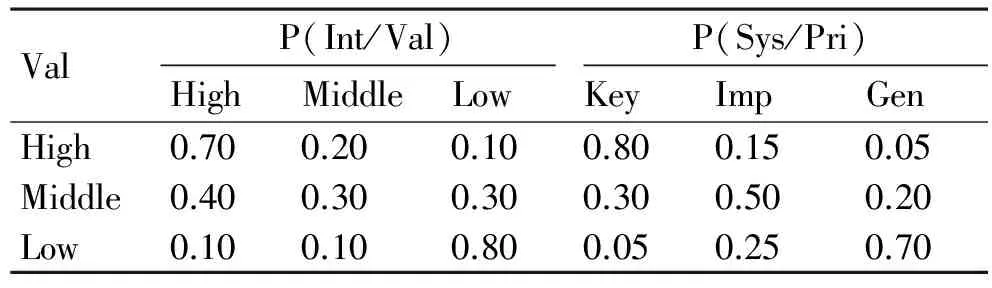
表2 条件概率表(二)
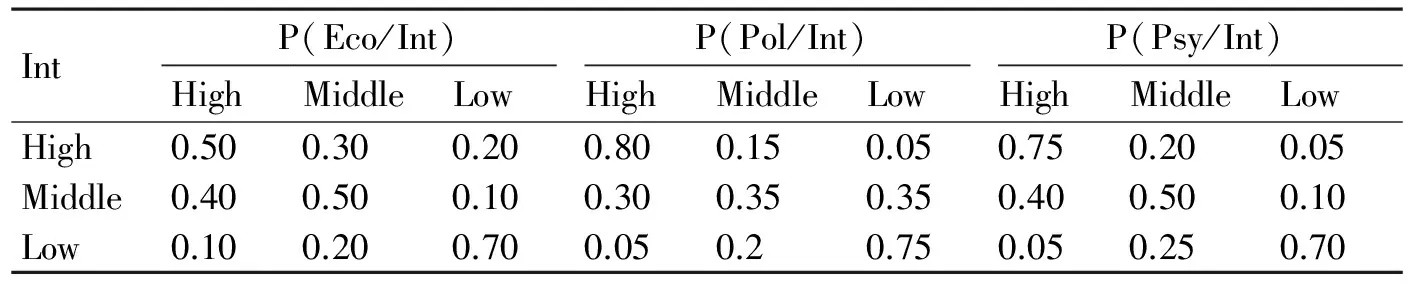
表3 条件概率表(三)
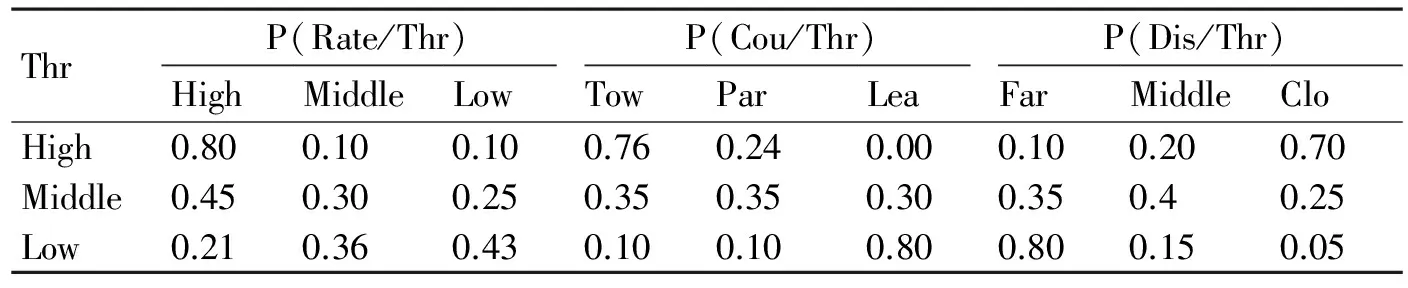
表4 条件概率表(四)
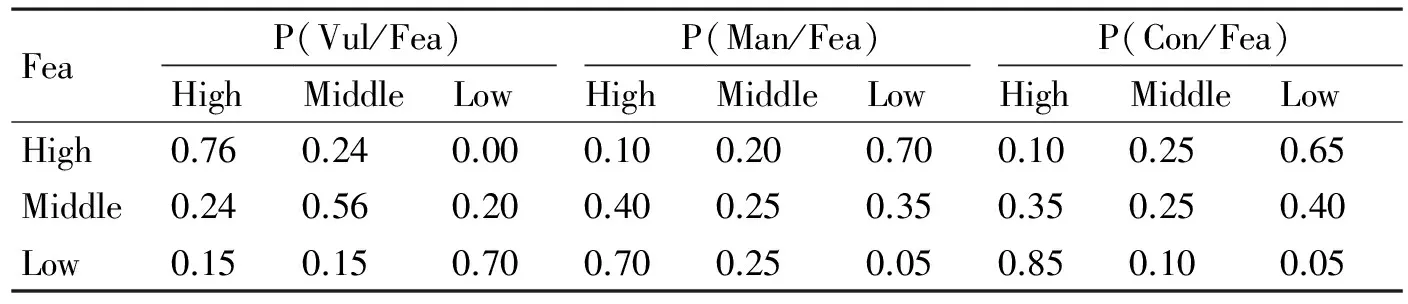
表5 条件概率表(五)

表6 状态转移概率表
6 仿真算例
假设某编队在海上巡逻发现八个海上目标,拟派出UAV执行对海突击任务。经过先期侦察探测,得到如下海战场态势:敌可能出现方位为150°,同时识别分析出目标为1艘驱逐舰,2艘护卫舰,1艘两栖登陆舰,2艘导弹艇,2艘补给船[10],对其分别编号如表9所示。
通过对当前海战场态势信息和历史案例库的定性匹配推理,初步确定了主要作战区域和初步目标清单。编队指挥员对实时得到的目标信息进行分析,采用基于离散DBN的目标选择优先等级评估模型对目标进行选择,制定最终的目标清单。
Netica是加拿大Norsys软件公司开发的一款BN工具平台,是目前应用比成熟的分析软件,在医疗、故障诊断等民用领域有着广泛的应用,在军事上也逐渐得到了应用。为验证模型的可行性和有效性,采用Netica进行仿真验证。
首先构建网络结构。如图5所示,在0时刻,由于模型还未进行时间扩展,没有得到关于目标的任何信息,为保证其后的评估不带有任何倾向性,默认所有结点的状态概率均匀分布。

图5 0时刻目标1优先等级评估模型(未进行时间扩展)
通过侦察兵力的实时侦察,表9给出了目标1三个时刻的影响因子值。
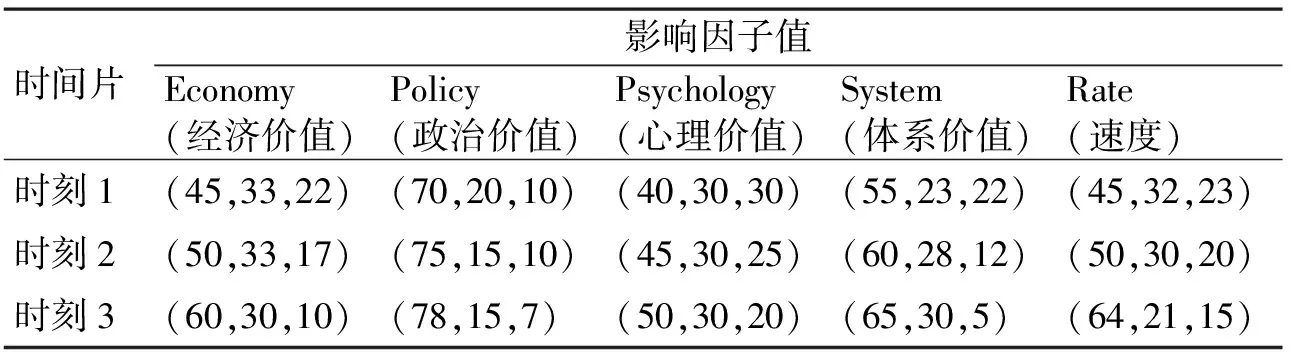
表7 目标1三个时刻的影响因子值(一)
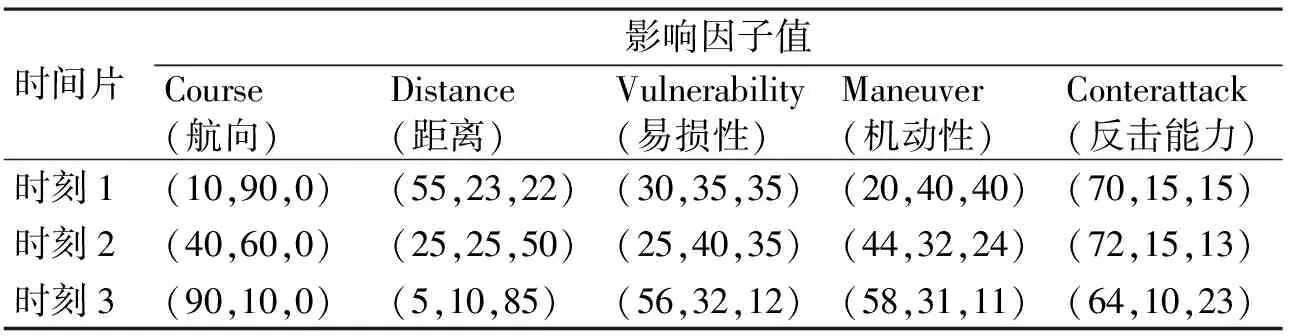
表8 目标1三个时刻的影响因子值(二)
将目标1的相关参数输入模型中,得到的推理结果如图3~图7所示。
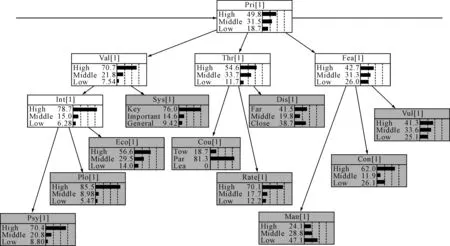
图6 1时刻目标1优先等级评估模型
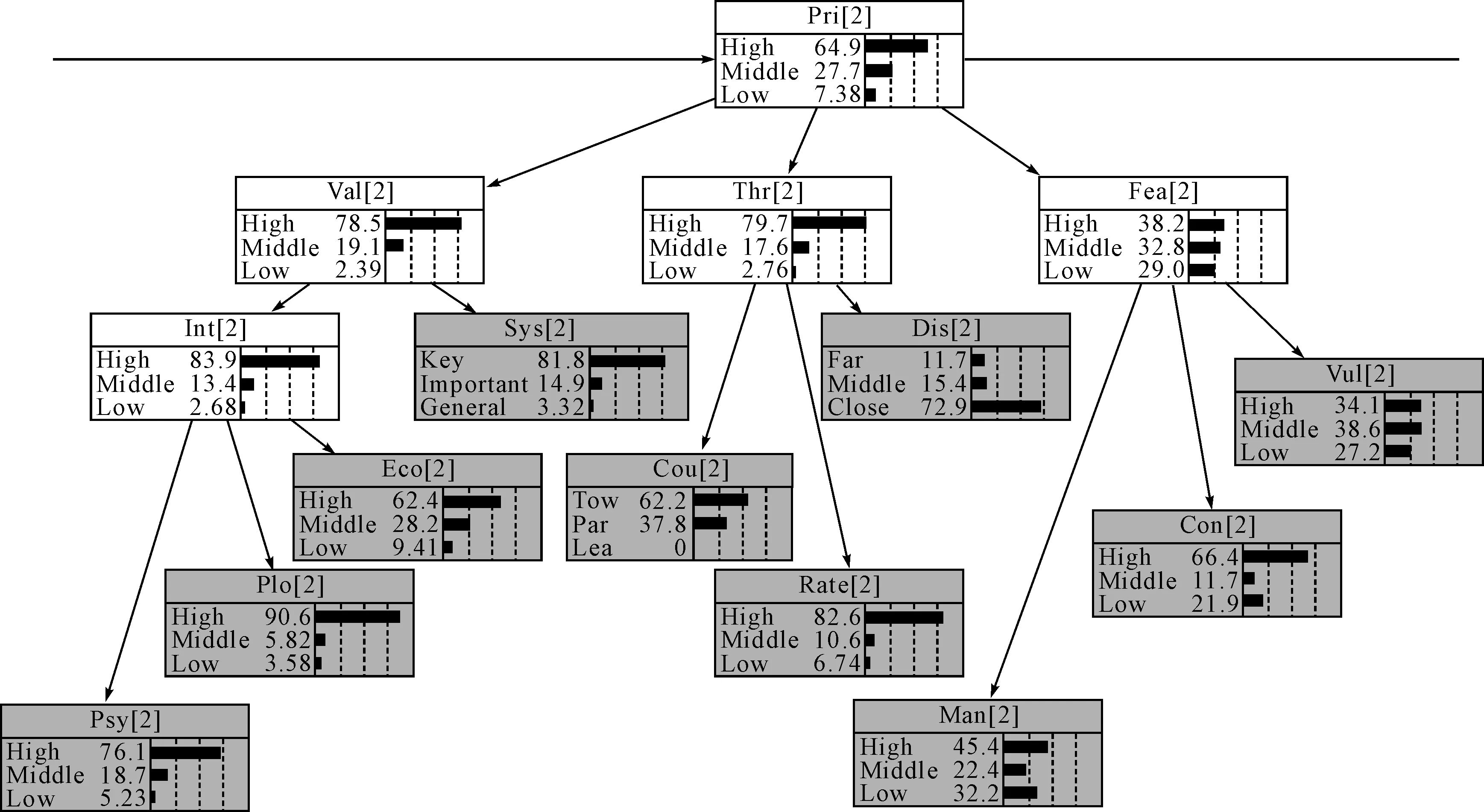
图7 2时刻目标1优先等级评估模型
将实验参数代入到建立的动态贝叶斯态势评估模型中进行仿真,仿真结果如图5~图8所示可以得目标1的优先级为高的概率分别为33.3%,49.8%,64.9%,83.8%,可以认为目标1打击的优先级非常高。以此类推,计算出所有目标的优先级排序结果如表所示。指挥员可参考表进行最终的目标选择。相较于专家打分法、排队遴选法、淘汰法、综合计算法、模糊综合评价以及模拟法等,基于DBN的目标选择方法,在整个目标选择过程中,下一时刻的推理结果不仅取决于该时刻的实时数据,而且与前一时刻的结果相关,计算结果实时性更强,可靠性更高,而且便于编程实现。
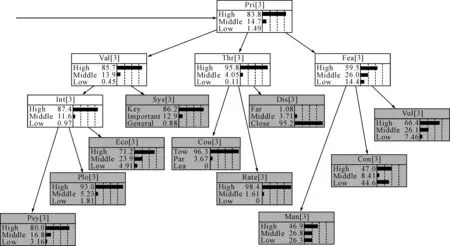
图8 3时刻目标1优先等级评估模型
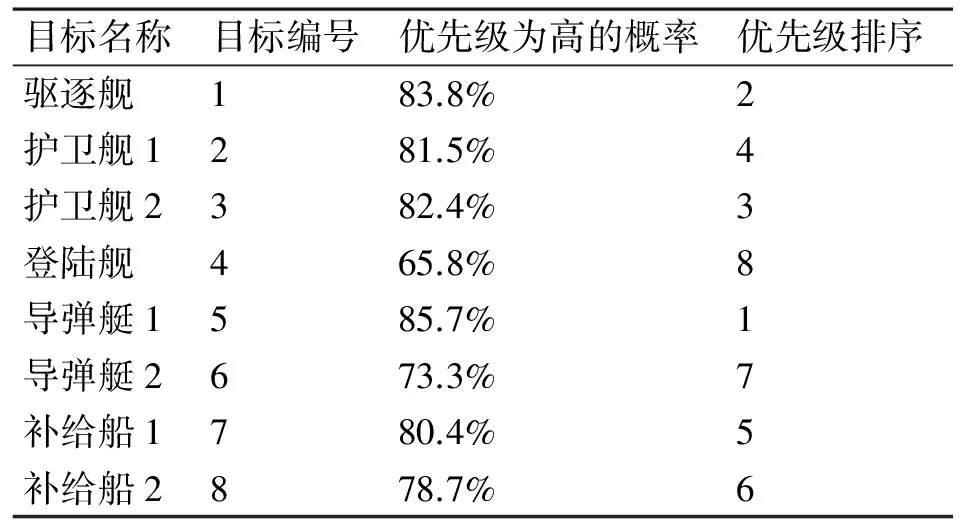
目标名称目标编号优先级为高的概率优先级排序驱逐舰183.8%2护卫舰1281.5%4护卫舰2382.4%3登陆舰465.8%8导弹艇1585.7%1导弹艇2673.3%7补给船1780.4%5补给船2878.7%6
7 结语
针对多UAV协同对海突击目标优先等级评估问题,从目标体系的角度出发,从目标价值性、目标威胁性和目标打击可行性三个方面重点分析了影响多UAV协同对海突击目标优先等级评估的主要因素,在此基础上建立了离散DBN。利用Netica软件根据作战想定对所建立的模型进行了仿真验证。仿真结果表明,利用基于离散DBN的多UAV协同对海突击目标优先等级评估模型可以有效地对目标进行选择和排序,且具有良好的优化效果和实效性,满足一般战场的实时性需求。
在真实的战场环境下,对海突击目标优先等级评估的影响因素非常多,要更加准确的实现目标选择还需在模型构建和参数学习方面进一步研究。
[1] 贺小亮,毕义明.基于贝叶斯网络的目标选择方案设计[J].现代防御技术.2014,42(3):6-11.
[2] 李冯敬,姚佩阳,田晓飞,王欣.动态贝叶斯网络在通信对抗目标选择中的应用[J].电光与控制,2012,19(8):63-69.
[3] WANG Zhaowen, YANG Xiaokang, YI Xu. Time varying dynamic Bayesian network for nonstationary events modeling and online inference[J]. IEEE Transactions on Singnal Processing,2011,59(4):1553-1566.
[4] 李京,刘卫东,杨根源.基于贝叶斯分类器的目标价值等级分析[J].现代防御技术,2012,40(5):46-49.
[5] 任佳,高晓光.贝叶斯网络参数学习及对无人机的决策支持[M].北京:国防工业出版社,2012:25-27.
[6] Kevin Patrick Murphy. Dynamic Bayesian networks: representation, inference and learning[D]. Berkeley: The University the university of California,2002.
[7] 李博宇.早期胃癌生物标记物识别及调控网络预测[D].成都:电子科技大学,2014.43-47.
[8] 史建国,高晓光,李相民.基于离散模糊动态贝叶斯网络的空战态势评估及仿真[J].系统仿真学报.2006,18(5):1093-1096.
[9] 肖兵,沈薇薇,金宏斌.基于动态贝叶斯网络的威胁估计研究[J].自动化与信息工程.2010,31(4):4-7.
[10] 隋振庚,李天伟,竺燕根,等.模糊多属性决策在舰艇打击海上目标的应用[J].舰船电子工程,2006,26(6):49-51.
Target Priority Evaluation about Multi-UAV Coordinated Air-to-Sea Attacking Based on Discrete DBN
HAN Yulong LIN Yun CHEN Rong SUN Shoufu GAO Wu
(Naval Aeronautical and Astronautical University, Yantai 264001)
To solve the target selecting problem of multi-Uninhabited Aerial Vehicle coordinated air-to-sea attacking, from the perspective of target system, a target priority evaluation model based on discrete Dynamic Bayesian networks was proposed from target value, target threat and target attacked feasibility. This model was simulated with Netica, which successfully accomplished the target priority evaluation. The simulation result proved the validity of the model, which can provide proposal for UAV troops.
UAV, DBN, air-to-sea attack, target priority, evaluation
2015年4月5日,
2015年5月29日
军事学博士研究生基金项目:舰载无人机突击岛礁作战任务规划研究(编号:2014JY473)资助。
韩玉龙,男,博士研究生,研究方向:海军武器装备攻防体系对抗和信息化。林云,男,博士,讲师,研究方向:海军兵种战术。陈榕,男,博士,讲师,研究方向:海军兵种战术。孙守福,男,博士研究生,讲师,研究方向:海军兵种战术。高武,男,硕士研究生,研究方向:海军兵种战术。
TP391
10.3969/j.issn.1672-9730.2015.10.006