基于复杂网络的舰艇编队防空作战模型研究*
2015-03-15卞泓斐张千宇
卞泓斐 张千宇
(海军航空工程学院 烟台 264001)
基于复杂网络的舰艇编队防空作战模型研究*
卞泓斐 张千宇
(海军航空工程学院 烟台 264001)
借鉴复杂网络对作战的描述模型,对舰艇编队防空作战过程进行网络化抽象,构建了一个基于复杂网络的舰艇编队防空动态网络模型,应用复杂网络的若干特征参数对网络模型进行分析,揭示了作战网络主要参数与作战体系真实特性之间的关系。
复杂网络; 舰艇编队; 防空作战
Class Number TP393.1
1 引言
近年来兴起的复杂网络理论是一门在综合大量社会网络、信息网络、技术网络和生物网络等科学事实基础上,综合管理系统论、数学、计算机等方法发现和研究网络共性规律的新兴科学,网络科学已经成为探索复杂性的一种新的途径[1~2]。
舰艇编队网络化防空作战是一个典型的复杂系统,它由许多具有自主特性的装备以及各类装备间的复杂关系组成。在舰艇编队防空作战中,战场的每一方都是一个内部单元以特定方式耦合的动态网络,作战行动不再是基于集合的,而是基于网络的,所以从网络科学的角度入手进行作战行为建模,能更合理地描述作战对抗行动[4]。
2 网络拓扑模型的抽象
图论中,网络G=(V,E)是由节点集V=(v1,v2,…,vn)和边集E=(e1,e2,…,en)所组成。边集E中每条边都有V中一对点与之相对应。一条连接点vi和vj的边ek可以记为ek=(vi,vj);顶点vi和vj称为ek的端点。由此可见网络模型的构建最终就可以归纳为节点和边的生成和演化规则。在基于复杂网络的作战建模中,把各个作战单元看成是节点,把作战单元之间的相互作用看成是边,这样就可以形成一个描述作战的网络[5]。
2.1 网络节点的抽象
根据对舰艇防空作战关键节点的梳理,将其在防空对抗中分为四类节点,分别为传感器节点、决策器节点、影响器节点和目标节点。
· 传感器节点S(Sensor):包括探测节点与跟踪节点。该类节点具备战场空间感知能力,其主要功能是获取作战空间内的目标信息,完成对目标的侦查、搜索、跟踪任务,并接收其他节点传送过来的信息,同时把这些信息发送给决策者。
· 决策节点D(Decider):包括指挥节点与控制节点。该类节点具备指挥、控制、判断以及情报融合能力,能够及时分析战场态势,判断敌方意图,做出相应决策。其接收来自传感节点的信息,并指挥影响器节点对目标实施攻击。
· 影响器节点I(Influence):包括火力节点与制导节点。该类节点具备软硬杀伤能力,接收来自决策节点的指令并对目标节点进行攻击。
· 目标节点T(Target):是指在我方攻击范围内的敌方有军事价值的目标。
这样,舰艇编队的作战系统就可以抽象成由S,D,I,T四类节点连接组成的作战网络[6]。
2.2 网络边的抽象
网络中的边表示了节点之间的关系,作战体系网络中连接不同节点之间的边不仅包括节点之间那些基于信息技术建立起来的连接,还应能够描述更多的相互关联。例如,传感器通过侦察探测发现目标,这种信息可能是无线电频谱能量、红外信号等,都可以表示成网络中的一条边。基于舰艇防空作战的实际过程,对作战体系网络内部各节点可能存在的边抽象作如下规定:
1) 每个决策节点可以与若干个传感节点或影响器节点连边,表示了每个决策器控制的传感器和影响器数量。
2) 一个传感节点可以与多个决策节点互连,意即一个传感单元可以为多个决策节点提供战场态势信息。
3) 一个影响器节点只能与一个决策节点互连,意即一个攻击单元只能执行一个也是唯一一个指控单元的发出指令,否则会造成命令冲突。
4) 不同的决策节点之间可以连边(双向),表示不同决策节点的组织协同。
5) 不同的传感节点之间可以连边(双向),表示不同传感节点之间可以信息共享与信息融合。
6) 决策节点可与友邻影响器节点连边,表示超视距攻击或接力制导时为友邻影响器提供信息支援。
7) 传感节点只与目标节点连边,与己方节点之间没有连边,即表示传感节点只感知目标的信息,不感知己方节点。
8) 影响器节点与目标节点连边,即表示影响器节点对目标节点进行攻击。
2.3 作战过程的抽象
根据以上定义的节点和链路的涵义,结合现代作战循环理论的观察、定位、决策、行动(OODA)的循环作战过程,可以构建一个描述最基本作战过程的网络如图1所示。
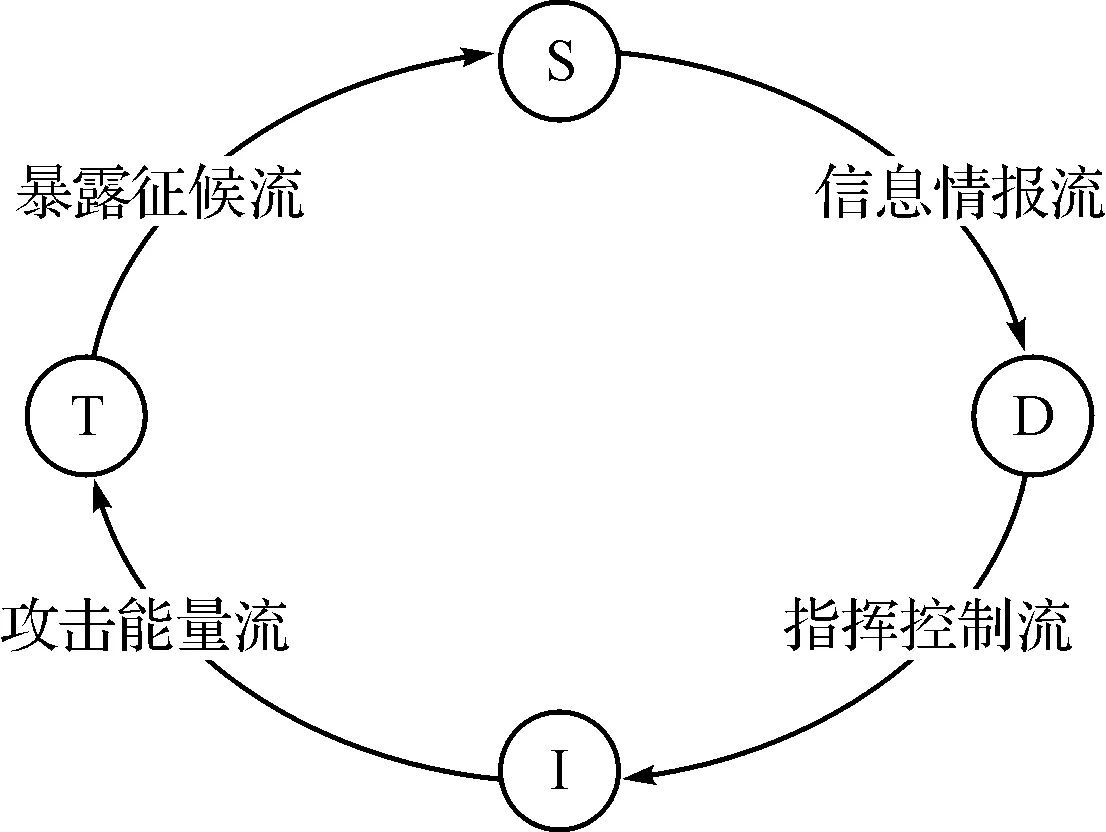
图1 标准作战环
图1中将作战过程简化为传感器发现目标,而后将目标信息传给决策器,决策器对形势进行分析后指挥影响器对目标实施攻击的环路。这是一个循环作战的过程,在完成一次行动之后,传感器重新感知敌方目标的损伤情况,并将结果传递给决策器,由决策器决定是否继续采取行动[7]。作战环代表了作战体系的最简单、基本环节,作战环数量的多少在一定程度上反映了作战体系可选择最短路径方案的多少,代表了作战体系的作战能力。
以上所描述的作战环网络也可以用矩阵表示,其中矩阵元素的定义如下:
根据以上定义,图1所示战斗网络的邻接矩阵可表示为
图1所描述的标准作战环是一个最简单的体系作战网络。但舰艇编队网络化防空作战中,一次完整作战活动一般都会经历多个侦查实体和多个决策实体,作战单元之间的联系更加紧密。因此考虑包括多个传感器节点和和决策节点的作战环称之为广义作战环(Generalized Operation Loop)如图2所示。在广义作战环中传感器之间可以互相通信,体现了信息的共享性;决策器之间也可以互相联系,体现了指挥的协同性[11]。广义作战环的数量体现了攻击方的作战潜力,数量越大意味着可供选择的攻击途径越多,网络的抗毁性能一般来说就越强。
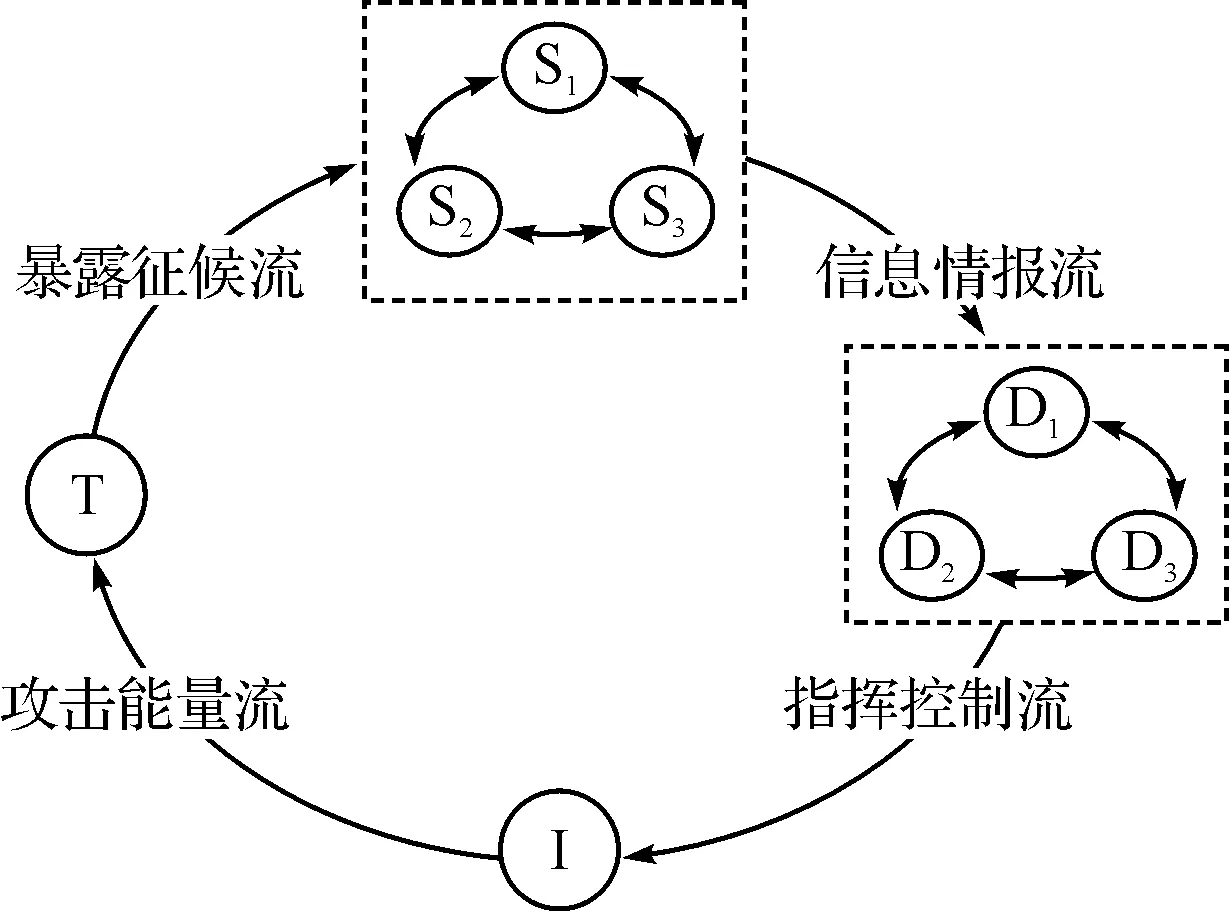
图2 广义作战环
3 网络模型的建构
根据上述规则,可以采用网络的方式描述舰艇编队防空作战网络的逻辑结构,值得注意的是随着体系对抗过程的推进,作战体系复杂网络拓扑形态也在不断发生变化,因而应当获取每个仿真步长内的作战体系复杂网络拓扑,从而形成描述对抗过程的动态演化网络。

表1 不同时间序列的网络拓扑图
现在做如下作战想定:我舰艇编队在某一海域执行任务,遭到敌飞机编队的攻击,因而实施对空防御。具体想定如表1所示。根据表1的作战想定,可以产生每一个时间序列的网络拓扑图,从而得到舰艇编队作战系统网络的动态运行过程。考虑到图形的简明直观及分析简化,现选取两艘舰艇,各参数如下:ND=2,NS=5,NI=4,NT=3,网络拓扑图中☆代表决策节点、○代表传感节点、◇代表影响器节点、□代表目标节点。
4 舰艇编队防空作战网络测度分析
网络测度是网络的统计特征,包括节点度、平均路径长度、聚集系数以及节点介数等。舰艇编队网络化防空体系网络模型的网络测度,可用来分析其静态网络特征。以下选取T3时刻的网络拓扑作为分析对象。
1) 节点平均度和度分布
节点vi的度是指与节点vi直接联系的节点数量。假定与节点vi相连接的节点集合Si为
Si={vj|vi∈N,aij=1}
则节点vi的度k(i)为
(1)
度分布p(k)是网络中任选一个节点,它的度为k的概率。上节中T3时刻网络的度分布如图3所示。
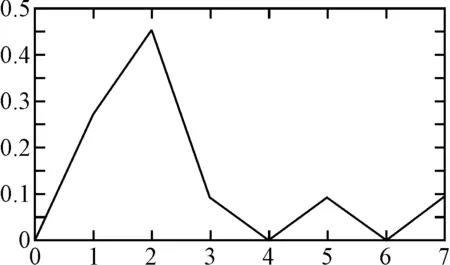
图3 T3时刻网络模型中各节点的度分布
由图可见T3时刻各节点的度分布不具有幂律分布和指数分布特征,由此体现了舰艇编队防空体系的受控性。
2) 网络的平均路径长度
网络的平均路径长度又称网络的平均距离。网络中两个节点vi和vj之间的距离dij定义为连接这两个节点的最短路径上边的数目。网络的平均路径长度L定义为任意两个节点之间的距离的平均值,即
(2)
式中,N为网络中节点总数。
在舰艇编队防空作战网络中,可以用网络平均路径长度表示各作战节点间进行信息传递所需要的连接边数。平均路径长度越长,说明网络层次越多,网络中信息的流动共享与同步将会越困难。本例中,由式(2)算出该网络的平均路径长度为2.1,因而该网络具有小的平均路径长度及时效性强的优点,能为各作战平台提供迅速、准确、有效地共享态势感知,从而实现防空作战的协同与同步[5]。
3) 网络的聚类系数特性
聚集系数是从全局刻画网络抱团特性的度量指标,用来描述邻居节点间的亲疏程度。节点vi的degree(i)个邻居节点构成一个子网络,子网络中边的数量为e(i),则节点vi的聚集系数为
(3)
在网络中,聚类系数有两个方面的含义: 1) 它表示编队内各个节点之间的相互协调能力; 2) 它在网络的重建中有着重要意义,例如作战系统在遭受敌方的打击时一些节点被删除,一些边被去除,而聚类系数较高的节点可以通过其他的路径与网络的重要节点取得联系从而有效完成网络重建。本文中,由式(3)计算出网络的聚类系数=0.49,远大于BA网络的聚类系数0.072,所以舰艇编队防空作战网络的聚类系数较强,遭受打击损失节点后的网络重建能力较强[8]。
4) 节点介数
节点介数为网络中所有最短路径通过该节点的路径数量之和。节点介数反映了节点在网络中的枢纽性。表2为T3时刻网络中各节点的介数。
由表2可看出,决策节点5与节点6的介数值具有明显优势,说明该节点的枢纽性较强,在网络中的作用明显。
通过以上对T3时刻网络测度的分析并与文献中的各种网络拓扑相应参数进行对比可以发现,该网络与小世界网络特征基本近似,均具有较短的平均路径长度与较大的聚类系数。小世界网络的时效性及鲁棒性都较强,由于网络的平均路径长度较短并且网络的聚类系数较大使得网络的连接性比随机网络要好很多,这样有利于信息在网络中的传播,使得在很短时间内经过很少的跳数,就能够从一个节点到达另一个节点,并且网络的重构性也较强。但同时也带来一个问题:小世界网络的病毒传播性也较强,由于集散节点连接很多其他节点,所有任何一个遭受病毒入侵的节点,都可能感染到网络中的集散节点,而一旦集散节点被感染,它就会把病毒传播给众多的其他节点,这就导致了病毒迅速在整个网络里的传播。因此该网络应着重预防敌方的网络病毒攻击,在预防敌方网络攻击时,应通过对关键节点进行免疫,充分利用网络本身的特点,顺应网络的进化趋势,可达到事半功倍的效果。
5 结语
文本根据复杂网络的思想,把舰艇编队防空作战的各单元抽象成节点,把各单元之间的相互作用抽象成有向边,将战场描述为一个由传感器、决策器、影响器、目标四类节点组成的有向网络图,并根据作战想定构建了一个基于时间序列的动态网络图,然后通过将网络特征参数与作战实际相结合对T3时刻的网络拓扑图进行了分析。分析表明该网络具有较强的受控性、时效性以及鲁棒性,并且具有小世界网络特征,结合小世界网络的特性提出该网络的弱点。本文的研究是一个初步的理论和方法探索,在此基础上,需要展开的具体研究和解决的问题还有许多。下一步工作可以从以下几个方面展开:
1) 研究对称情况下的网络对抗行动,即把双方都考虑成由传感器、决策器、影响器组成的系统,每个单元都有可能成为对方攻击的目标;
2) 研究节点不同连接方式下的作战行动,可以按照不同的网络拓扑结构对传感器网和决策器网进行连接;
3) 研究动态网络的统计特征,对每一仿真步长的网络测度进行比较,分析各参数的变化情况。
[1] 王斌,谭东风.基于复杂网络的作战描述模型研究[J].指挥控制与仿真,2007,29(4):12-16.
[2] 田宝国,李武.基于复杂网络的舰艇作战模型研究[J].系统仿真技术,2011,7(2):120-125.
[3] 徐圣良,姜青山.舰机协同防空作战信息网络的复杂性分析与实证[J].电光与控制,2011,18(8):1-5.
[4] 王斌.基于复杂网络的作战同步建模研究[D].长沙:国防科学技术大学,2007:46.
[5] 现代海战网络的复杂性分析与实证研究[J].舰船科学技术,2010,37(7):106-109.
[6] 张春华,张小可.一种基于作战环的作战体系效能评估方法[J].电子设计工程,2012,20(8):62-64.
[7] 胡斌,黎放.基于复杂网络的舰艇编队网络中心战模型研究[J].系统仿真学报,2010,22(8):1960-1964.
[8] 邹杰,王磊,等.超视距协同空战网络化结构研究[J].舰船科学技术,2013,35(9):123-129.
[9] 舰艇编队防空作战复杂网络建模[J].舰船科学技术,2010,32(11):101-104.
[10] 超视距协同空战协同网络结构模型静态特性研究[J].海军航空工程学院学报,2013,28(1):77-84.
[11] 基于复杂网络的作战网络模型抗毁性研究[J].系统仿真学报,2011,22(1):56-60.
Warship Formation Air Defense Model Based on Complex Network
BIAN Hongfei ZHANG Qianyu
(Naval Aeronautical Engineering Academy, Yantai 264001)
Reference to description model for combat in the complex network, the combat process for warship formation air defense is abstracted.A dynamic network model of warship formation air defense is constructed based on complex network. Network model is analyzed by applying several characteristic parameters of complex network. The relationship is revealed between the main parameters of combat network and the real characteristics of combat system.
complex network, warship formation, air defense
2014年10月7日,
2014年11月27日
卞泓斐,男,博士研究生,研究方向:海军兵种信息作战。张千宇,男,硕士,讲师,研究方向:海军兵种信息作战。
TP393.1
10.3969/j.issn1672-9730.2015.04.007
