基于单目视觉的障碍物定位和测量
2015-03-14王振王化明
王振,王化明
(南京航空航天大学,江苏 南京 210016)
基于单目视觉的障碍物定位和测量
王振,王化明
(南京航空航天大学,江苏 南京 210016)
摘要:障碍物定位与测量是智能移动机器人自主运动的核心问题之一。研究了一种结合障碍物色彩属性和接触边缘属性的算法,通过单个视觉传感器实现平坦路面中障碍物的定位和测量。该算法以图像中已知路面范围的外观属性为基准对图像进行初步处理,依据障碍物和地面接触边缘属性对障碍物进行初步定位,在障碍物上选择区域,以该区域外观属性为基准对图像进行二次处理,得到障碍物在图像中占据范围,结合视觉传感器成像原理,对障碍物位置和尺寸进行标定和测量。以轮式移动机器人为实验平台,验证所提算法的可行性和精度,最终测得其定位误差为1.6%,测量误差为1.5%。
关键词:单目视觉;外观属性;高度测量
0引言
障碍物定位是实现移动机器人智能运动的关键问题。为了适应未知环境的要求,机器人必须能够对运动环境进行探测和识别,并能够自主、高效地选择合适运动路径。同时,对于弹跳式运动机器人而言,障碍物高度也是决定其运动路径的重要参数。依据障碍物实际高度,控制弹跳式移动机器人的输入能量和弹跳姿态,实现对机器人弹跳高度、弹跳轨迹等的有效控制,提高能源利用率。
大多数智能移动机器人都通过多种传感器配合,以实现障碍物探测,如激光扫描传感器、声纳传感器、视觉传感器等。这些传感器均能够提供障碍物与机器人的间距信息,因此可以用于智能移动机器人的障碍物探测和躲避,然而在对障碍物具体尺寸进行测量时都存在不足之处。文献[1-3] 中利用激光扫描传感器对机器人运动环境进行探测,但算法复杂且代价昂贵。双目视觉法是通过对两个视觉传感器所得图像的比较,并结合两视觉传感器相对位置参数,对障碍物进行定位和测量;但双目视觉法所需处理数据较多、算法复杂,且两视觉传感器共视角区域受距离影响,因此可探测范围受很大限制[4-7]。Iwan Ulrich等提出了基于HSI(hue、saturation、intensity,色调、饱和度、强度)图像中路面与障碍物色调和强度属性的不同对路面和障碍物进行区分的算法,而该算法所需运算量大,且并未完成对障碍物的定位和测量[8]。
针对上述问题,研究了一种基于单目视觉的障碍物定位与测量算法。以图像中已知地面范围内像素外观属性为基准,对图像中地面范围进行初步提取,并通过接触边缘属性对障碍物进行初步定位,进而以障碍物上中间区域外观属性为基准,对图像进行二次处理,实现对该障碍物的提取。根据视觉传感器成像原理,结合障碍物在像中所处位置,得到障碍物相对于视觉传感器的位置和障碍物高度,为弹跳式移动机器人的运动规划提供依据。
1障碍物定位和测量算法
本文所提出的障碍物定位与测量算法是依据单位像素点外观属性的不同判别障碍物的存在,该算法的实现基于下述假设条件的成立[8-11]。
假设条件:图像中障碍物与路面外观属性存在显著差异,用来区别障碍物与地面的外观属性有多种选择,如密度、亮度、色彩等,但该外观属性必须满足以下两点要求:1) 该属性能够提供足够多的信息,以区分障碍物与地面;2) 通过该属性实现地面和障碍物区分的过程不能耗时过长,以实现实时探测。本文以灰度值属性作为算法处理的依据,依据地面和障碍物灰度值属性差异,实现地面范围和障碍物范围的提取。
1.1 算法基本原理
当视觉传感器聚焦到障碍物上时,障碍物在其视觉传感器像屏上成像,其成像大小与障碍物和视觉传感器的间距成反比,具体成像原理如图1所示。
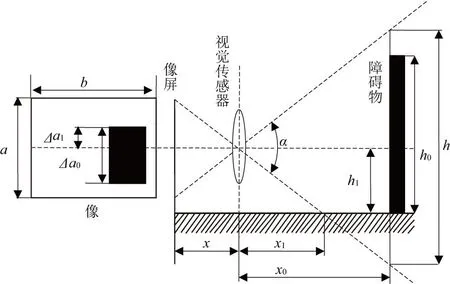
图1 视觉传感器成像原理
图中,a、b分别为视觉传感器所成像的行、列像素值,h1为视觉传感器中心距离地面高度,x为像屏与视觉传感器距离,x1为h1高度下能够在视觉传感器中成像的最近地面点与视觉传感器间距,h0为障碍物实际高度,x0为障碍物与视觉传感器间距,Δa0为障碍物高度方向在像中占据像素范围,Δa1为h1高度在像中对应占据像素范围,α为视觉传感器的垂直视场角,h为x0距离下视觉传感器能够探测的垂直高度范围。由图1可知:
tan(α/2)=h1/x1=(h/2)/x0
(1)
同时,基于视觉传感器成像过程中三角形相似原理,可得障碍物上高度Δh与其在像中所占据范围Δa2关系如式(2)所示[12]:
Δh/x0=Δa2/x
(2)
由此可知,像中障碍物所占据范围内单位像素差值所代表实际长度(即单像素高度)Δl相等,并可由下式表示:
Δl=h1/Δa1=h0/Δa0=h/a
(3)
由此,即可求得障碍物高度h0为:
h0=Δl·Δa0=h1·Δa0/Δa1
(4)
同时,将式(3)代入式(1)中可以求得障碍物与视觉传感器之间的距离x0为:
x0=a·x1/(2Δa1)
(5)
因此,由式(4)和式(5)可知,在该算法中,障碍物相对于视觉传感器的距离及自身高度的计算和a、h1、x1、Δa0、Δa1有关,其中a、h1、x1与系统运动环境有关,当视觉传感器安放固定后将不再变化。因此,如何准确、快速地得到Δa0、Δa1的大小是成功实现算法的关键。
1.2 图像处理基准
视觉传感器所成图像为彩色图像,单位像素色彩属性均可通过红色(R)、绿色(G)和蓝色(B)组成,若分别对每个像素点的R、G、B三个参数进行判断则所耗时间较长、运算量大,不能满足进行实时图像处理的需求。而灰度值图像是将每个像素点的R、G、B参数数值经运算化为灰度值参数。由此即能够提供足够的信息判别障碍物,又能够减少计算消耗时间,因此以灰度值属性作为区分障碍物与地面的外观属性参数(图2)。
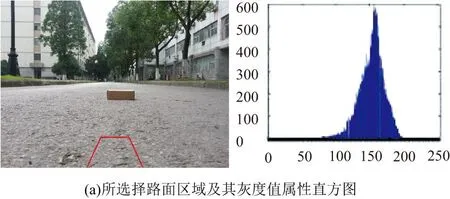
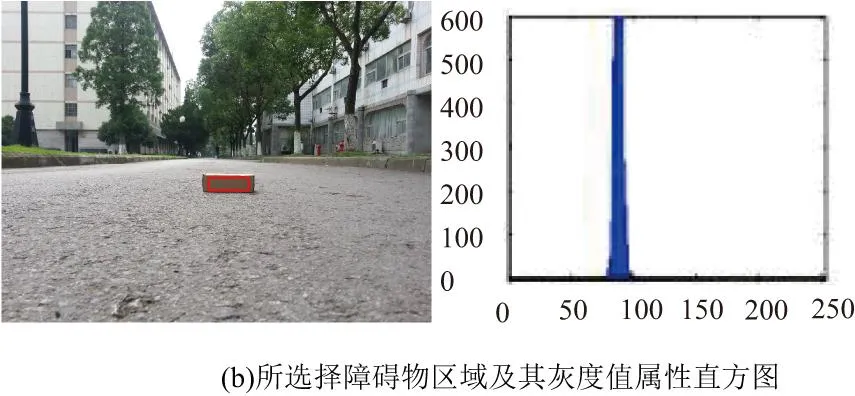
图2 选择区域灰度直方图
图2表明图像中路面范围和障碍物范围的灰度值属性差异。由图可知,图像中路面区域和障碍物区域内像素点灰度值属性范围存在较为明显差异,因此可依据该属性差异将图像中路面范围和障碍物范围进行区分。
1.3 算法流程
以地面范围和障碍物范围灰度值属性差异为基础,通过对图像中单位像素点灰度值属性的分析,提取障碍物范围,并求得该障碍物在图像中所对应Δa0、Δa1数值,进而实现障碍物定位和测量。
用于障碍物定位和测量的图像处理过程包括以下步骤:
1) 图像转换
对输入图像进行平滑滤波并转换为灰度图像。
2) 路面基准区域选择
基于机器人安全运动的要求,可确定当前机器人前方一定范围内(10~30 cm)内不存在障碍物,因此可将视觉传感器所成图像最底部中间范围视为路面范围,进而以此范围作为路面基准区域A。
3) 图像初步处理
对基准区域A中像素点灰度值属性进行处理,得到其灰度值属性范围,进而对图像中每一像素点灰度值属性进行处理,将属性处于该范围外区域视为障碍区域(设为白色),而将其余区域视为路面区域(设为黑色),由此初步将路面从图像中提取。
4) 障碍物初步提取
从图像底部中间列向上逐行扫描,求得灰度值属性变化区域,进而依据障碍物和地面的线接触属性以及障碍物轮廓属性,将机器人前方直线区域上障碍物提取。
5) 障碍物基准区域选择
为避免障碍物轮廓处因光线影响引起其灰度值属性变化,需以障碍物属性基准,对图像进行二次处理。由此选择上一步所得障碍物区域的中间区域作为障碍物基准区域B。
6) 图像二次处理
对基准区域B中像素点灰度值属性进行处理,得到其灰度值属性范围,并以此属性范围为标准,对图像中每一像素点灰度值属性进行处理,将属性处于该范围外区域视为路面区域(设为白色),而将属性处于该范围内区域视为障碍物区域(设为黑色),由此初步将路面从图像中提取。
7) 障碍物定位和测量
由基准区域B分别向四周扫描得到障碍物四边边界,由此得到障碍物在图像中所处位置及其占据范围大小,通过运算即可对障碍物进行定位和测量。
图3所示为算法中所对应图像处理结果,其中(a)为传感器采集原图像,(b)为区域A选择图像,(c)为以区域A为基准进行初步处理后图像,(d)为区域B选择图像,(e)为经二次处理后所得图像,(f)为最终障碍物选择图像。

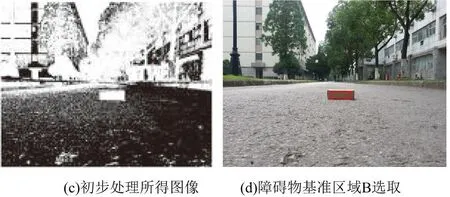
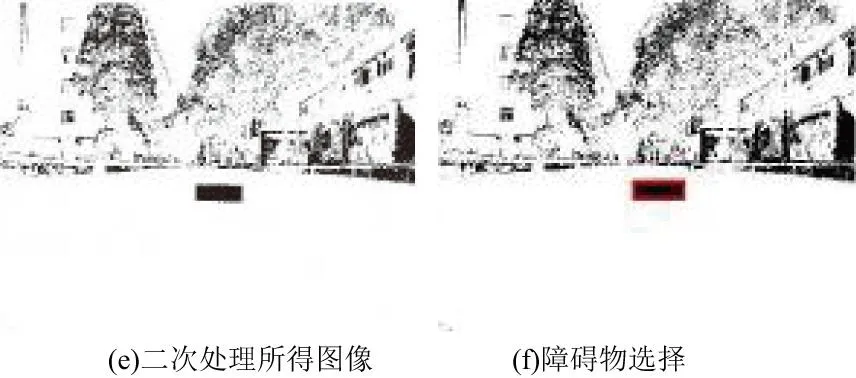
图3 图像处理流程
2实验结果
为检验本文所提算法的准确性,共进行了5次实验:分别将障碍物一、二、三放置于距离视觉传感器一定距离处,依据本文所提算法对障碍物进行定位和测量,并将算法所得数值与实际测量数值相比较,以验证所提算法的可行性与精度。
实验所用视觉传感器像素为2 400×3 200,其垂直视场角为37°、水平视场角为50°,传感器中心距离地面高度为53 mm。
图4所示为实验所得图像对比,其中(a)、(b)、(c)分别为障碍物1在1000 mm、1500 mm和2000 mm距离情况下图像对比,(d)、(e)为障碍物2和障碍物3在1000 mm距离情况下图像对比,上侧图像为不同位置处视觉传感器所得彩色图像,下侧图像为算法处理后所得障碍物提取图像。

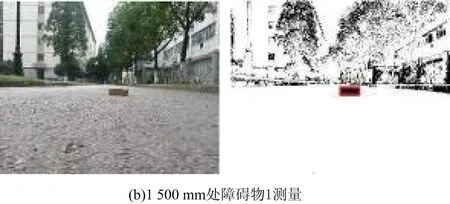
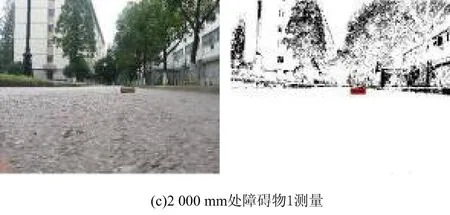


图4 障碍物定位与测量处理结果
对障碍物在像中位置进行测量,得到其在像中所占据像素范围参,数如表1所示。

表1 障碍物占据像素位置参数
经计算后所求得测量值与实际测量值如表2所示。

表2 障碍物定位与测量实验结果
3分析和讨论
由实验所得图表分析可得:
1) 随着障碍物距离的增加,障碍物在像中所占据的像素范围不断减小。因此,当障碍物距离达到一定数值后,障碍物在像中所占据的像素范围已小至无法分辨,由此所提算法的实际可测距离有限制。
2) 本文以地面和障碍物的灰度值属性作为两者区别的主要属性,因此可将具有较大灰度值属性差别的物体进行区分。然而,对于室外环境而言,该算法将不同于路面灰度值属性的区域均设为障碍物区域,但如图3(c)所示,算法将图像中草地也设为障碍物区域,减小了机器人可行区域范围。
3) 本文所提算法中图像处理的主要依据是障碍物与地面之间灰度属性,故对于两者色彩属性相似时算法可行性较低。然而并非只有灰度值可体现图像色彩属性,RGB、HIS、HSV等图像也可表达障碍物与地面之间色彩属性的不同,故通过对于其他彩色空间的研究也可实现基于单目视觉的障碍物定位与测量。
4结论
研究了一种基于单目视觉的算法对机器人运动环境中的障碍物进行定位及测量,以实现机器人自主、智能运动的目的。该算法以地面和障碍物色彩属性以及障碍物底部与地面接触处的边缘属性作为参考依据。当假设一成立时,在图像中已知地面范围上选择区域A,进而以所选区域A的直方图作为基准,对图像进行初步处理,并根据障碍物底部与地面接触处的边缘属性将障碍物从图像中分割出来,进而在每个障碍物上选择区域B,以所选区域B的直方图作为基准,对图像进行二次处理,以便将其他干扰因素去除,由此即可得到每个障碍物在图像中的具体位置,进而根据视觉传感器成像原理求得障碍物相对于视觉传感器的位置和其自身尺寸参数。经实验验证,所提算法能够较为快速、精确地对障碍物进行定位和测量,且所得数据与实际数据的误差较小,最终测得其定位误差为1.6%,测量误差为1.5%。
参考文献:
[1] Koichi N, Joel C, Satoshi K Autonomous Navigation of a Humanoid Robot over Unknown Rough Terrain using a Laser Range Sensor[J]. The International Journal of Robotics Research, 2012, 0(0):1-12.
[2] Jaehyun H, Dongchul K, Minchae L, el al. Enhanced Road Boundary and Obstacle Detection Using a Downward-Looking LIDAR Sensor[J]. IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, 2012, 61(3):971-985.
[3] MANDUCHI R, el al. Obstacle Detection and Terrain Classification for Autonomous Off-Road Navigation[J]. Autonomous Robots, 2005, 18:81-102.
[4] Pedro S, Magno G, Luis C, el al. Stereo-Based All-Terrain Obstacle Detection Using Visual Saliency[J]. Journal of Field Robotics, 2011, 28(2):241-263.
[5] Zhongfei Z, Richard W, Allen H. Obstacle Detection Based on Qualitative and Quantitative 3D Reconstruction[J]. IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENG, 1997, 19(1):15-26.
[6] Kurt K, Motilal A, Morten R B, el al. Mapping, Navigation, and Learning for Off-Road Traversal[J]. Journal of Field Robotics, 2009, 26(1):88-113.
[7] Alberto B, Massimo B, Alessandra F, el al. Visual Perception of Obstacle and Vehicles for Platoon[J]. IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEM, 2000, 1(3):164-176.
[8] Iwan U, Illah N. Appearance-Based Obstacle Detection with Monocular Color Vision[C]. Proceeding of the AAAI National Conference on Artificial Intelligence. Austin, TX, July/August 2000.
[9] Roth P M, Winter M. SURVEY OF APPEARANCE-BASED METHODS FOR OBJECT RECOGNITION[J]. Inse for Computer Graphics and Vision,Graz, Tech/Rep. ICG-TR-01/08.
[10] Ohnishi N, Imiya A. Appearance-based navigation and homing for autonomous mobile robot[J]. Image and Vision Computing, 2013, 31:511-532.
[11] Cherubini A, Chaumette F. Visual Navigation of a Mobile Robot with Laser-based Collision Avoidance[J]. The International Journal of Robotics Research, 2012, 0(0):1-17.
[12] 沈常宇,金尚忠. 光学原理[M]. 北京:清华大学出版社, 2013.
Obstacle Detection and Measurement Based on Monocular Vision
WANG Zhen, WANG Hua-ming
(Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
Abstract:Obstacle detection and measurement is one of the key problems for the autonomous movement of intelligent mobile robot. This paper presents an algorithm based on the combination of the appearance and the contact edge which is used to detect and measure the obstacle on the flat surface using single visual sensor. In the algorithm the image is primary handled according to the appearance property of known ground surface and the obstacle position defected according to the edge property of the contact area between obstacle and ground, then the reference area on the obstacle is seleted and the image is handled again according to the appearance property of the obstacle to get the position of the obstacle in the image, finally the obstacle detection and measurement are finished according to the principle of visual sensor. The effectiveness and accuracy of the algorithm is tested and verified on a wheeled mobile robot, the error of detection algorithm is about 5 %, while the error of measurement algorithm is about 1.89 %.
Keywords:monocular vision; appearance property; height measurement
收稿日期:2013-10-14
中图分类号:TP242.6
文献标志码:B
文章编号:1671-5276(2015)01-0198-04
作者简介:王振(1989-),男,江苏准安人,硕士研究生,研究领域:弹跳机器人,机器人智能控制。