基于外极斜率匹配的自行高炮身管指向测量方法*
2015-03-14陈扬
陈 扬
(陆军军官学院 合肥 238000)
基于外极斜率匹配的自行高炮身管指向测量方法*
陈 扬
(陆军军官学院 合肥 238000)
为解决基于多目视觉的自行高炮身管指向测量中立体图像匹配多义性问题,提出运用以外极斜率匹配为基础的快速去伪匹配法,实验表明,对多幅图像匹配时,与仍采用传统的两两匹配的方法相比,该方法不需要额外的匹配约束条件,可以更有效地避免误匹配。
多目立体视觉; 外极斜率; 身管指向
Class Number TJ430
1 引言
自行高炮火控系统精度测试内容中包括随动系统响应精度、火控系统解算射击诸元的解算精度以及最终的自行高炮身管指向精度,根据现有的测量技术和科技发展解决这一问题,其关键点和难点主要是自行高炮身管指向精度的测量[1]。对于目前比较流行的是基于立体视觉测量的方法,例如双目立体视觉测算空间物体的技术,是通过采取立体图像对中对应特征点的视差来对一个物体或一个点在景物中的深度信息进行了解和分析的。不过在摄像机取得的任意两幅有视差的图像上进行视觉视匹配时,有一个需要解决的问题,即图像匹配过程中的多义性[2]。
2 双目立体视觉匹配模型[3]
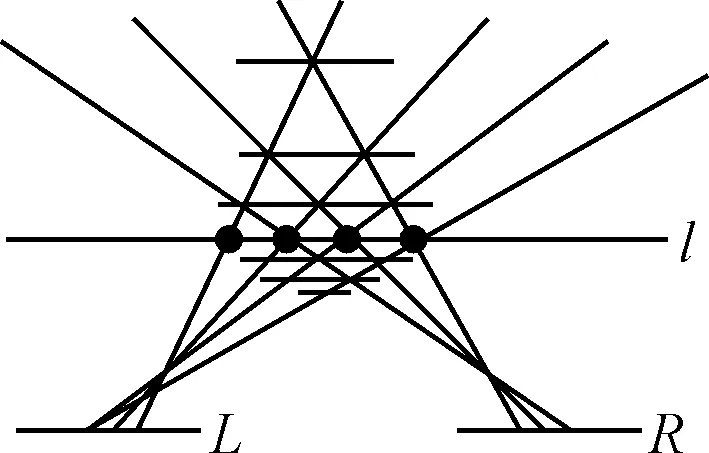
图1 双目立体视觉匹配模型
当在两视图相应的epipolar线上选取特征点时,如果产生了重复性的特征点(周期出现并具有相似的灰度变化),则用现在的匹配算法可能难以确定其正确位置,如图1的示意图。假设设置被测量景物为一个平行于两个摄像机镜头,在平行于两个摄像机镜头的中心连线的直线l上,出现了四个具有相同特征的点,那么在这种情况下,在摄像机拍摄取得的左、右视图中,它们产生的特征点就无法有效地区分,因此在匹配时就可能产生多义性。
在两台测试摄像机中,它们的位置放置所带来的对三维立体被测物的摄像视角有较小的交向角或者当直线l不平行于两摄像机镜头的中心连接线时,也会产生有类似的情况。
3 多目立体视觉匹配模型
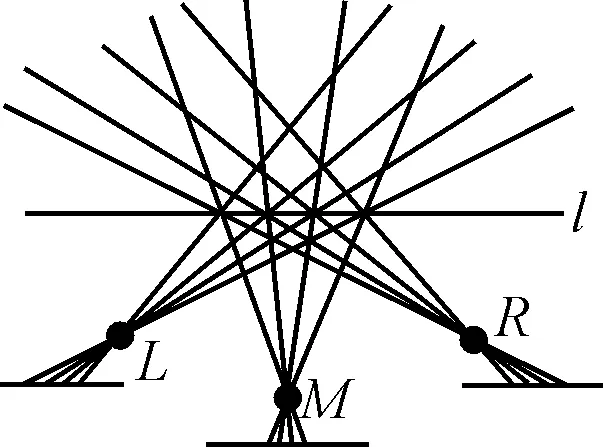
图2 多目立体视觉匹配模型
解决该种多义性问题,其中的一种方法就是利用在另一个角度上的视图进行校正,即用三幅视图来产生正确的体视匹配,和传统的两两匹配的形式相比,三幅视图进行匹配时,需要增加一台实验测试所用的摄像机来进行矫正。如图2所示,在左、右摄像机正中再放置一台摄像机。根据分析,若三台测试用摄像机平行放置,则仍然可能产生误匹配,但是如果将中间的测试用摄像机的放置位置做一点偏移,则在这样的情况下不会产生误匹配或者说产生误匹配的可能性很小,可以有效地避免测试摄像机摄取图片的多义性,提高双目立体视觉测算空间物体的技术的精确性。
图3给出三幅视图产生深度信息的一般抽象图像模型:oi(i=a,b,c)是三个摄像机的透视中心;πi(i=a,b,c)是空间点P在三个图像平面上的像点。则oiPoj(i,j=a,b,c且i≠j)构成的平面,又称epipolar plane,与像平面πi和πi的交线为epipolar line。例如epipolar lineCbaVba实际上是过Oa和P两点的空间直线在像平面πb上的光学投影,则空间点P在像平面πa上的像点Pa在平面πb上的对应像点,即Pb点在epipolar lineCbaVba上。
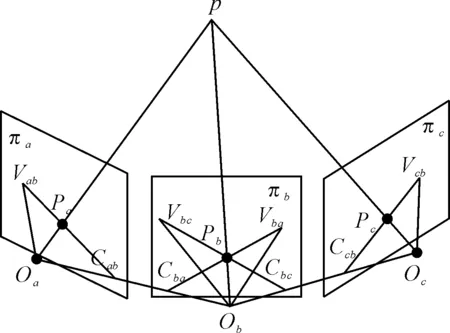
图3 多目立体视觉中的外极斜率匹配
如果CbaVba上只有一个像点,则其为像点Pa在像平面上πb的对应点。但在多数情况下epipolar lineCbaVba上拥有多个像点,即拥有伪目标。使用第三个摄像机在三目立体视觉中有着合理去除伪目标的效果。我们知道,像点Pa和Pc为一真实匹配对,则它们决定的空间点P在第二个摄像机的像平面πb上的像点一定在epipolar lineCbaVba和CbcVbc上,即为CbaVba和CbcVbc的交点,这就是三目立体视觉的epipolar约束。因为满足epipolar约束的伪目标只在极个别情况下发生,故在绝大多数情况下,在三目立体视觉系统中使用epipolar约束,在这种情况下即可以找到唯一匹配[3]。
4 外极斜率匹配原理[3]
如图3,定义1、2实验测试用摄像机的三维立体空间坐标系。oa-xayaza和ob-xbybzb分别都是实验测试用摄像机的三维立体空间坐标系。其中1、2摄像机的透视中心分别是oa、ob;1、2摄像机像面坐标系分别为Oa-XaYaZa、Ob-XbYbZb;Oa、Ob分别为1、2摄像机面中心。两实验测试用摄像机的三维立体空间坐标系变换关系分别为
(1)
(2)
式(1)和式(2)中Rba(Rab)为旋转矩阵,且为单位正交矩阵;Tba(Tab)为平移矩阵。
设1、2摄像机的有效焦距分别为fa、fb。oaPa在摄像机1的坐标系下的表达式为
(3)
转换到摄像机2坐标系中,由式(2)和式(3)可得
(4)
则可得出式(5)
(5)
当s=0时,外极中心Cba的像面的坐标为
高校的开放性管理使校园安全隐患增加了很多社会因素,尤其是复杂的周边环境,很多周边消费场所安全性差,诱导性消费因素较多,加之学生在校外受到的约束较少,很可能出现恶劣事件。与此同时,校园周边社会人士较多,进出校园不受限制,很可能威胁到学生的人身和财产安全;并且很多高校交通不够便利,很难确保乘坐周边出租车的安全;这些社会人员又存在流动性,给管制工作带来了难度。
当s=∞时,消失点Vba的像面的坐标为
又设像面πa上直线CabVab的像面方程为
(6)
其在摄像机2坐标系下向量表达式为
(7)
摄像机1的透视中心oa在摄像机2坐标系下的向量表达式为
(8)
两向量所构成的平面经过摄像机2坐标系的坐标原点,设平面方程为
Axb+Byb+Czb=0
(9)
则该平面方向向量为
+(c1·a2-a1·c2)·j+(a1·b2-b1·a2)·k
(10)
(11)
而像面πb在摄像机2坐标系下的方程为
zb=fb
(12)
(13)
该斜率即为像面πa,上斜率ka,在像面πb上的匹配斜率。
同理可得像面πc上斜率kc在像面上的匹配斜率为
(14)
5 在自行高炮身管指向测量中的运用
在立体视觉测量系统中通常以直线段作为匹配特征[4~5],这里提出的多目测量系统中,三幅视图由三个摄像机根据具体的标定过程和测量对像来得到,当测量自行高炮身管指向时,具体的匹配算法步骤如下。
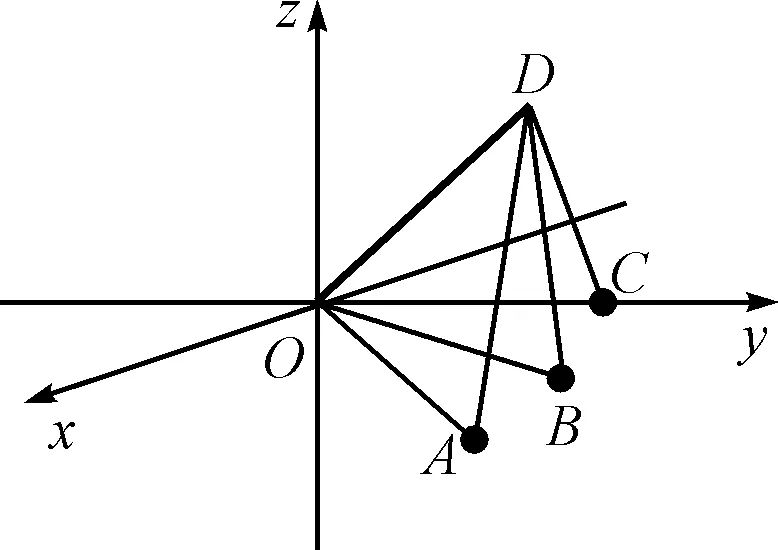
图4 测自行高炮管两点之间的夹角
在图4中测自行高炮管两点之间的夹角,O、D均为根据自行高炮身管上的标志点;A、B、C为摄像机。以O点为原点建立空间坐标系。实际上摄像机方位根据具体的标定过程和自行高炮身管上标志点的选取而定,下面可以通过假设它们的数值进行模拟计算来验证是否得到优化。
1) 采用直线拟合得到OA、OD的直线方程,并求其交点O。由于已经将点O设为原点,所以这一步在这里可省略。根据图4,OA=la1,OB=la2,OC=la3;OD=lb1,2,3;
2) 算出左摄像机A像面上点Pa1,与外极中心Cab,所得外极斜率ka1;


5) 求出直线Lba1,和Lba1的交点Pb1即为中间摄像机B像面上点Pa1的匹配点;同理,在直线OA上取不同于Pa1的任一点Pa2,依照步骤2)、5),可得中间摄像机B像面上点的匹配点Pa1;
6) 在当中摄像机B成像图像上根据点Pb2和点Pb1可得直线OD即为与直线OA相适应的目标直线;
7) 同理可求得直线lb2和lb3。
将得到的左、中摄像机A、B像面上的直线la1,2,3和lb1,2,3分别进行逆透视变换,可以计算得到空间直线OA、OB、OC与OD的夹角。实际上摄像机方位根据具体的标定过程和自行高炮身管上标志点的选取而定,假设它们的数值进行模拟计算来验证是否得到优化。取角∠AOB和角∠BOC均为10°,取摄像机ABC和高炮身管标志物与O点的距离为10,取∠AOD=10°,∠BOD=20°,∠COD=30°。如表1所示。

表1 优化匹配法求得直线夹角
多目视觉测量中三幅图像若仍采用传统的两两相互匹配的算法,这样的方式需要将每两个图像都进行匹配,然后计算结果。根据这种方法,匹配过程相当烦琐。现在采用两两匹配法进行测量,其测量结果如表2所示(位置A、B和C分别对应摄像机左、中和右拍摄的图像)。

表2 两两匹配法求得直线夹角
对以上结果进行分析,可知:
1) 优化匹配法可以有效地防止误匹配,且计算更简单,结果更稳定更精确。
2) 上文举例出的多目立体视觉系统中虽然只采用了三幅图像,但通过增加摄像机的台数,便可以增加图像的数目,且保持摄像机的内方位元素不变,对每三幅图像都可以照样使用快速去伪匹配法,一次性得到多个结果,减少匹配时间,从而提高了工作效率。
6 结语
这一方法是针对多目立体视觉测量系统的特点而提出的,对于多幅图像可扩展采用。另外,与对多幅图像对仍采用传统的两两匹配的方法相比,它不需要额外的匹配约束条件。因此这种方法可以更有效地避免误匹配,因而使基于多目视觉测量的自行高炮身管指向测量的精确度得以提高。
[1] 朱耀轩,段修生,张岐龙,等.火炮身管指向的视觉测量方法[J].光电子·激光,2012,23(11):2163-2167.
[2] 侯紫峰.计算机立体视觉匹配研究[D].北京:中科院计算技术研究所,1988.
[3] 赵梅芳,沈邦兴,吴晓明,等.多目立体视觉测量系统中的快速去伪匹配法[J].中国计量学报,2003,14(2):0089-0093.
[4] 胡宝洁,曾峦,熊伟.基于立体视觉的目标姿态测量技术[J].计算机测量与控制,2007,15(1):27-28.
[5] 赵汝进,张启衡,左颢睿.一种基于直线特征的单目视觉位姿测量方法[J].光电子·激光,2010,21(6):894-897.
Method of Testing Anti-aircraft Barrel Pose Based on the Theory of Epipolar Slope Matching
CHEN Yang
(Army Officer Academy, Hefei 238000)
This paper proposes a method of rapid ambiguity-avoiding feature matching based on the theory of epipolar slope matching to solve the problem of ambiguity in the test of anti-aircraft barrel pose. Experiments show that this method is free from extra matching restriction while more effectively avoiding unnecessary wrong matching in the situation of more images, compared with the traditional pairwise method.
muti-view strereo vision, epipolar slope, barrel pose
2015年3月11日,
2015年4月30日
陈扬,男,硕士研究生,研究方向:武器系统检测。
TJ430
10.3969/j.issn.1672-9730.2015.09.036
