海浪干扰对船舶航向影响规律研究*
2015-03-14陈永冰
叶 松 陈永冰 周 岗 钟 斌
(1.海军工程大学 武汉 430033)(2.海军工程大学电气工程学院 武汉 430033)
海浪干扰对船舶航向影响规律研究*
叶 松1陈永冰2周 岗2钟 斌2
(1.海军工程大学 武汉 430033)(2.海军工程大学电气工程学院 武汉 430033)
在现有海浪研究的基础上,以国际电工委员会制定的航迹控制系统性能标准(IEC)62065提供的舰船运动模型为基础,模拟分析不同等级海况,不同类型船舶,不同航行条件下的航向角变化情况,证明了航向角在海浪干扰下的变化存在周期性,并总结出吨位、速度等对航向角变化的影响规律。为研究海浪干扰条件下的船舶操纵规律,优化操舵控制打下基础。
海浪; 航向控制; 运动模型
Class Number U666
1 引言
据统计,海面大约70%的时间里有大小不同的海浪发生[1],海浪是影响船舶航行的外界条件中最大的因素。在海浪的作用下,船舶会产生艏向的摇摆,进而造成航向的偏差。为了抵消包括海浪在内的各种因素对航向造成的偏差,使船朝着固定航向运行,操作时只能通过频繁的打舵来补偿外界因素引起的航向角振荡。但海浪本身是具有周期性特点的,其对船舶航向的影响也应具有一定周期性,而频繁打舵就会造成大量的无效控制,加大了舵机的机械磨损,同时也会造成舰船实际航程的增加,并相对降低了船速,增加了燃料消耗,降低了舰船航行的经济性。因此,充分研究海浪对船舶航向影响的规律性,对于提高操舵效率,改进船舶操控效果有着重要的意义。本文通过对不同类型船舶在不同海况下的航向模拟,得出海浪干扰对航向控制的基本规律。
2 海浪干扰模型建立
2.1 海浪的基本理论
海浪是自然界的一种随机现象[2],影响海浪的因素很多,即使在同一条件下,其呈现的波浪也不是完全确定的,如波高和周期等波浪的特征值都是随意变化的。对于这种随机现象,欲寻找在某一定时刻、一定地点波浪的具体特征值是不可能的,也是无意义的。因此在进行海浪的研究时,要通过利用对海洋的大量观测分析得出的统计规律,进行近似的研究。
海况级是对海面不平程度的一种定量的描述,按波高的大小分为10级,0级最小,9级最大。波高级根据有义波高来划分,1/3有效波高的定义是[3]:在连续时间内,对每100个随机波浪按其瞬时波高从大别小排列,求出前1/3部分最大瞬时波高的平均值,此即称为有效波高。根据1/3有效波高在浪级表中所处的位置,查表可得到相应的海况级。
2.2 海浪干扰模型建立思路
在航向控制过程中[4],操舵系统通过电罗经不断地把传来的实际航向与设定航向相比较,以获得相应的控制信号来控制舵机适时的转舵,通过对舵角的控制来实现对船舶的控制。因此航向的变化角度及速度主要决定于自动舵舵角的变化。而海浪的干扰作用[5],主要体现在海浪作用于船舶舵叶,产生附加的转舵力矩,使得力矩发生变化,进而影响船舶转舵。因此,在建立海浪的干扰模型时,基本的思路就是将海浪的扰动结果等效到自动舵舵角上,通过附加舵角的形式研究船舶航向的变化规律。
2.3 海浪干扰模型的建立方法
船舶运动数学模型[6]是以船舶运动仿真与控制为核心,在研究航向变化时,采用国际电工委员会制定的航迹控制系统性能标准[7](IEC)62065提供的运动模型,其航向模型的表达式为
(1)
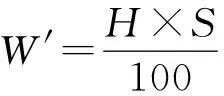
H=H0(ss)*(1+Hr*Randb)*AH0(ss)
(2)
代表海浪的1/3波高。Randb代表一个随即产生的,范围在[0,1]之间的数。A代表随周期产生的-1或1,用来体现海浪的方向。
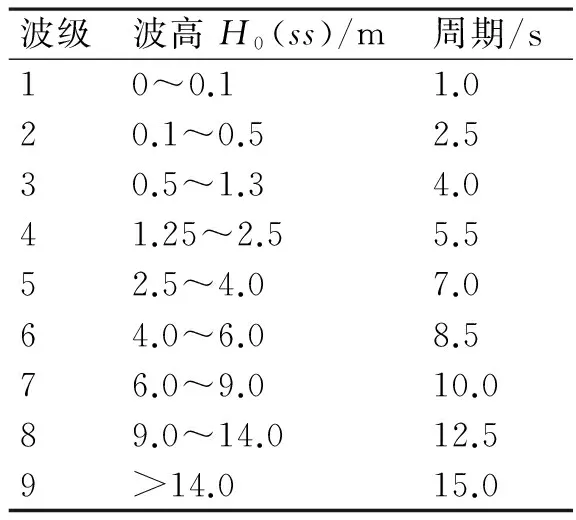
表1 道氏波级表[8]
海浪的方向变化快慢体现在海浪的周期上[8],每周期海浪的方向变化两次,其半周期即为方向改变的周期T。
相应的H0(ss)及周期T与海浪等级的对照表可在表1查到。
3 仿真对比
选取两种典型船进行航向的仿真,典型船的相关参数如表2所示。

表2 两种典型船型的主要参数[10]
分别对两种船型在10个等级的海浪下的航向角与舵角的关系进行模拟,选取典型图对比如下文如示。
3.1 低等级海浪条件,不同吨位船的航向角干扰比较
第一组,选取A类船和B类船,设置2级海浪,舵角为0°,航向模拟图如图1所示。
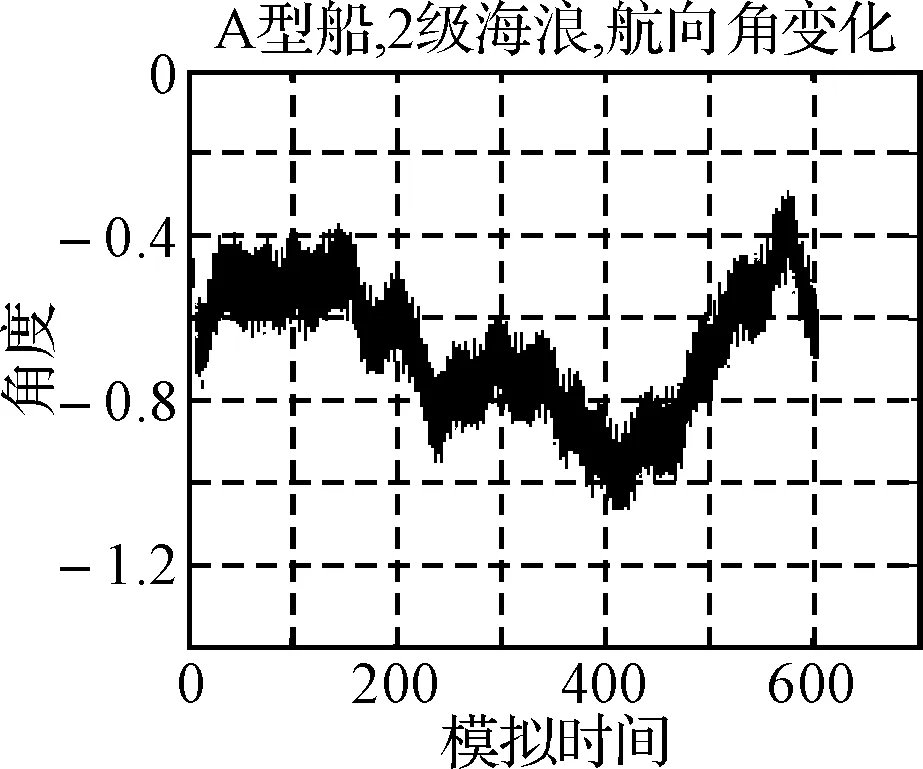
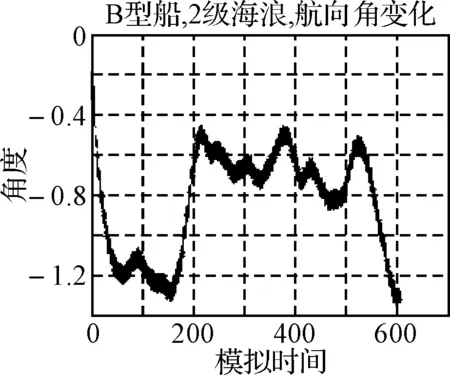
图1 2级海浪条件下,A、B两种船型航向角变化
分析:从图1可以看出,在海浪等级较低时,船在航行过程中,受到海浪的干扰,体现出了航向变化的周期性,但海浪干扰下航向变化的幅值较小,船基本能够按照既定航向航行。
3.2 高等级海浪条件,不同吨位船的航向角干扰比较
第二组:选取A类船和B类船,设置分别设置4级,7级,9级海浪,舵角为0°,航向模拟图如如图2~图4所示。
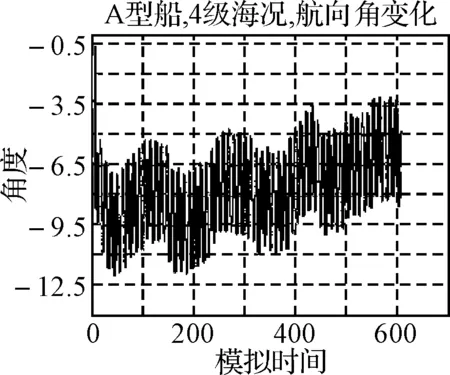
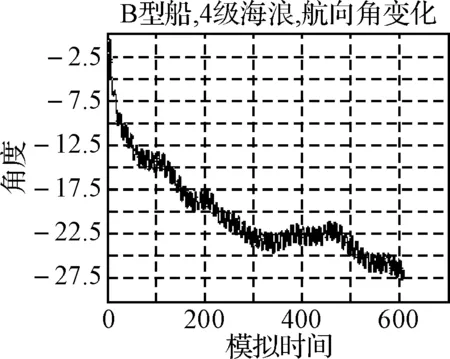
图2 4级海浪条件下,A、B两种船型航向角变化


图3 7级海浪条件下,A、B两种船型航向角变化


图4 9级海浪条件下,A、B两种船型航向角变化

海浪等级对比参数A型船B型船4级海况频率(Hz)0.1830.177幅值(°)2.461.247级海况频率(Hz)0.1030.103幅值(°)25.0012.509级海况频率(Hz)0.0670.067幅值(°)84.5050.00
由表3中数据可以分析得,在海浪等级较高时,船在航行过程中,海浪对航向的影响较大,航向变化体现出明显的周期性振荡。相比较可以看出,在相同海浪等级的情况下,吨位越大的船,其航向角在海浪的影响下,振动幅值越小。而吨位较小的船则出现相对较大的振动幅值。在同级别海浪下,两种船型航向角的振动频率是近似相同的。
3.3 不同船速下A类船的航向角干扰比较
第三组:选取A类船,设置5级海浪,船速取15kn与30kn,航向模拟图分别如图5~图6所示。

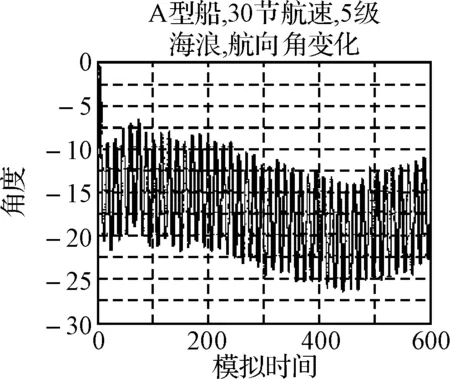
图5 5级海浪条件下,A船不同速度下航向角变化
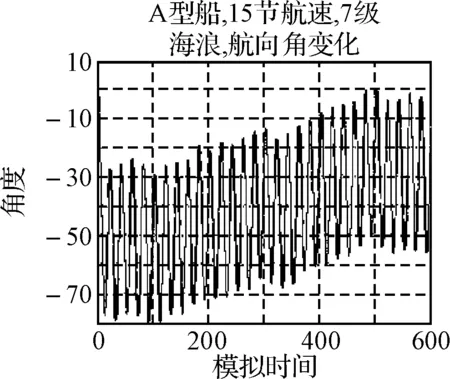

图6 7级海浪条件下,A船不同速度下航向角变化
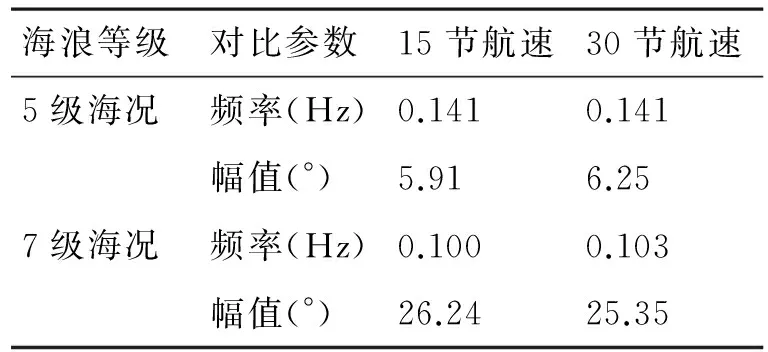
海浪等级对比参数15节航速30节航速5级海况频率(Hz)0.1410.141幅值(°)5.916.257级海况频率(Hz)0.1000.103幅值(°)26.2425.35
通过表4可以看出,在船型,外界海浪干扰相同的情况下,在IEC62062标准下,航向角受海浪的干扰幅度及频率与船速的大小没有明显的关系。受扰频率只与海浪自身的频率有关。
4 结语
针对海浪对船舶航向影响问题,文中讨论了等效到舵角上的海浪扰动数学模型,并选取两类典型船,确定相应的参数数值,用Matlab仿真了不同海浪等级下航向的变化曲线。讨论了在舰船吨位、航速不同的情况下,航向对海浪干扰的变化特点。对比仿真图可得出,一定海浪等级条件下,海浪对于航向的干扰确实存在周期性的特点。通过进一步研究海浪干扰的周期性以及其与航向操纵变化的关系,可以实现对操舵控制的优化,减少无效舵的产生,提高控制的精度,减少机械损耗。
[1] 许景波,边信黔,付明玉.随机海浪的数值仿真与频谱分析[J].计算机工程与应用,2010,46(36):226-229.
[2] 刘维亭,张冰,王建华.海浪的模拟仿真[J].华东船舶工业学院学报,1999,13(6):6-9.
[3] 朱洪华,蔡建立.不规则海浪的仿真[J].人工智能及识别技术,2007:202-203.
[4] 刘勇,李文魁,陈永冰,等.基于航向自动舵实船环境模拟的海浪扰动模型研究[J].海军工程大学学报,2002,12(5):60-66.
[5] 李殿璞.船舶运动与建模[M].北京:国防工业出版社,2008,292-293.
[6] 贾欣乐,杨盐生.舰船运动数学模型[M].大连:大连海事大学出版社,1999:1-2.
[7] 国际电工委员会62065标准—航迹控制系统,操作和性能要求,测试方法和要求的测试结果[S].2002.
[8] 李瑞丽.海浪周期关系的研究[J].海洋湖沼通报,2007:13-18.
[9] 梁宵,李巍.舰船操纵性与耐波性[M].大连:大连海事大学出版社,2012:118-119.
[10] 国际电工委员会11674标准,船舶和海上技术艏向控制装置[S].
Effect of Waves Interference on Ship Course
YE Song1CHEN Yongbing2ZHOU Gang2ZHONG Bin2
(1. Naval University of Engineering, Wuhan 430033) (2. Department of Electrical Engineering, Naval University of Engineering, Wuhan 430033)
On the basis of the existing research on the waves, the ship motion model provided by International Electrotechnical Commission (IEC) 62065 is used to simulate and analyze the heading angle changes under different levels of sea conditions, different types of ships, different sailing conditions. It proves the existence of a periodic change in the heading angle of wave interference, and sums up the tonnage, speed and other effects of heading angle changes in the law. It lays foundation for the study of law of ship maneuvering under the waves interfere, optimization of steering control.
waves, heading control, motion model
2014年7月5日,
2014年8月23日
叶松,男,硕士研究生,研究方向:舰船组合导航与操舵控制。陈永冰,男,博士,教授,研究方向:舰船组合导航与操舵控制。
U666
10.3969/j.issn1672-9730.2015.01.016
