单点系泊下船舶的运动数学模型
2015-03-14曾丽华
曾丽华
(重庆安全技术职业学院,重庆 404000)
单点系泊下船舶的运动数学模型
曾丽华
(重庆安全技术职业学院,重庆 404000)
摘要:随着海洋开发的深入,海上作业越来越多,研究单点系泊下船舶的运动模型并分析其运动规律,能有效控制环境干扰力对船舶运动的影响。本文通过建立单点系泊下船舶的运动数学模型,利用Maya建立船舶模型,以及利用Unity3D搭建虚拟环境来实现船舶的运动仿真。仿真结果验证了所设计控制器的有效性。
关键词:单点系泊;Maya建模;Unity3D;虚拟现实
0引言
随着海洋开发日益深入,船舶海上作业也越来越频繁,包括海洋考察、水产捕捞、油气开发等作业方式。采用经济可靠、结构简单、使用和维护方便的系泊系统,对于工程和特种作业的船舶来说很重要。系泊系统可分为悬链线系泊、悬链线锚腿系统、单锚腿系泊、张力腿系泊、系缆桩——缓冲系泊等方式。按照系泊系统系泊点的个数不同,可以分为单点系泊系统和多点系泊系统,本文主要研究单点系泊系统。
单点系泊系统指船舶通过1条系在船头或船尾的系泊缆或者刚性摇臂与海上的1个系泊点相连接。目前,单点系泊系统被广泛采用,主要是此系统有一定的抵抗海洋环境能力,可靠性高,经济性好。本文主要研究在单系点下建立船舶运动模型,及利用虚拟现实技术对船舶运行进行分析。
1概述
1.1 国内研究现状
目前,单点系泊系统研究已取得了一定成果。古文贤[1]研究了单点系泊船舶在海上产生偏荡运动的原因以及所受到的外载荷的特性,同时对船舶的运动状态进行了比较系统的分析,得到了偏荡运动的运动特点。卓永强[2]通过MMG模型建立船舶运动方程,对风浪流作用下的船舶进行了受力分析,利用蒙特卡罗理论模拟了单点系泊下船舶的运动走向,提出了一种比较实用的方法来对单点系泊下的船舶进行安全评估。杜度[3]等人利用三自由度微分方程,在Simulink中进行时域仿真模型,给出船舶随时间运动时系缆刚性对系泊运动的影响。季春群等人[4]以悬链线描腿系泊系统(CALM)为例,探讨了系缆索的长度对单系泊稳定性的影响,并利用时域分析的方法,对某一360 kDWT油船系泊在直径为12 m浮筒上的CALM进行分析计算。计算结果表明,随着系缆索长度的增加,油船的首摇运动明显增大。
1.2 国外研究现状
国外的单点船舶运动研究也有了长足的发展,如英国、美国、日本都已经建立了一整套完善的研究体系。日本的井上欣三将走锚的概率作为评价单点系泊下船舶的安全标准,在风浪等外力作用下,得到了单点系泊下船舶的概率密度系数,但是该方法需要在水池中进行试验才能得到具体的数据,所以实用性较差。Bernitsas和Papoulias以Abkowitz三阶数学模型为基础,研究了单点系泊系统的稳定性和分叉问题,研究了平衡点处的稳定性、静态和动态分叉问题。Gobat等采用一种新型的有限差分方法建立了缆索静力学和动力学方程,可广泛用于水下水上的单点系泊系统。
2单点系泊下船舶的数学模型
本文建立船舶运动模型需要把船舶放在固定坐标系和运动坐标系中,研究船舶运动所用的参数、符号采用国际水池会议推荐及造船和轮机工程学会术语公报推荐的体系。
2.1 船舶运动学模型
1)固定坐标系
由于受到外界力和力矩的作用船舶才能在海上航行,本文选取惯性参考系研究船舶的运动,由于在地球局部运动的船舶其经纬度近似固定,因此地球表面可以近似为惯性坐标系,即固定坐标系。固定坐标系Eεηζ选取海上的任意一点为原点E, Eε指向正北方向,Eη指向正东方向,Eζ指向地心方向。
2)运行坐标系
当船舶与海水等发生作用时,固定坐标系的使用就会受限,因此需要建立运动坐标系,运动坐标系固定在船体上,原点o选取在船的重心或者重心以外的点上,但是对于船舶来说,船体坐标系的坐标轴的方向与惯性主轴的方向一致。纵轴ox取在纵向剖面内,方向指向船首,平行于水线面;横轴oy取与纵向剖面垂直,指向右,平行于水线面;垂直轴oz通过右手定则,取在纵向剖面内,指向船底方向。
3)坐标系间的转换
在固定坐标系原点和运动坐标系原点重合的情况下,可以做3次初等旋转变换将固定坐标系转换到oxyz坐标系下。
通过3次绕轴旋转变换可以将固定坐标系和运动坐标系相互转换:
ξ
η
ζ=S×x
y
z或者x
y
z=S-1×ξ
η
ζ。
(1)
式中旋转变换矩阵为:
S=cosψcosθcosψsinφ-sinψcosφcosψsinθcosφ-sinψsinφ
sinψcosθsinψsinθsinφ-cosψcosφsinψsinθcosφ-cosψsinφ
-sinθsinφcosθcosφcosθ。
(2)
对于六自由度运动的船舶,需要6个独立坐标确定其位置和方向,前3个坐标为x,y,z对时间的导数,后3个坐标为,对时间的导数。对于船舶这6种不同的运动可以定义为:3个平动:前进、横移、升沉;3个转动:横摇、纵摇、首摇。

表1 美国造船与轮机工程协会规定的船舶运动变量符号
4)船舶运动学模型
船舶六自由度运行学方程可以表示为:
x=ucosψcosθ+v(cosψsinθsinφ-sinψcosφ)+
w(sin sinφ+cosψcosφsinθ),
y=usinψcosθ+v(cosψcosφ+sinφsinθsinψ)+
w(sinθsinψcosφ-cosψsinφ),
z=-usinθ+Vcosφsinφ+wcosθcosφ;
θ=p+qsinθtanθ+rcosφtanθ,
φ=qcosφ-rsinφ,
ψ=qsinφcosθ+rcosφcosθ,θ≠±90°。
(3)
上式改写成矢量形式为:
η=J(η)v,
式中J(η)等价于p·
Θ·=R(Θ)03×3
03×3T(Θ)U
Ω。
其中,
η∈R3×S3,v∈R6,
R(Θ)=cosψcosθ-sinψcos+cosψsinθsinφ
sinψsinφ+cosψcosφsinθ
sinψcosθcosψcos+sin sinθsinψ
-cosψsin+sinθsinψcosφ
-sinθcosθsinφ
cosφcosθ,
T(Θ)=1sinφtanθcosφtanθ
0cosφ-sinφ
0sinφ/cosθcosφ/cosθ。
2.2 船舶动力学模型
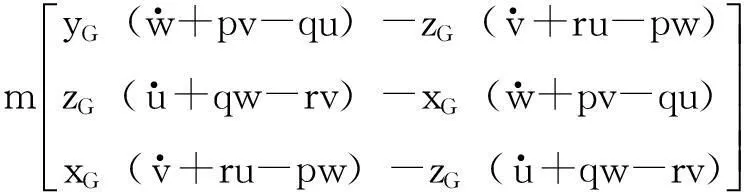
由刚体的动量定理,得到船体的平移运动方程:

(4)
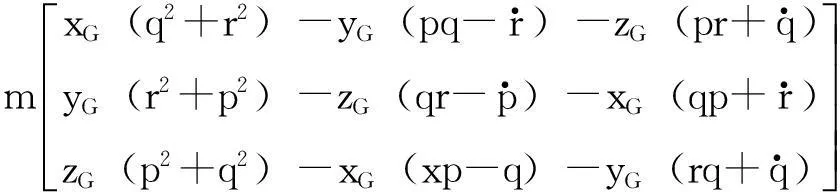
由刚体的动量矩定理,得到船体的旋转运动方程:
(5)
式中:Jx, Jy, Jz分别为刚体绕坐标轴xb, yb, zb的转动惯量;Jxy=Jyx, Jxz=Jzx, Jyz=Jzy分别为刚体对xb, yb轴,yb, zb轴和xb, zb轴的惯量积;第1项为刚体加速旋转产生的惯性力矩;第2项为陀螺效应产生的惯性力矩;第3项为附件力矩。
由式(4)和式(5)得到刚体动力学方程矢量形式:
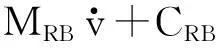
(6)
式中:v=[u,v,p,q,r]为速度矢量;τRB=[X,Y,Z,K,M,N]T=τH+w+wm+τ为外力和力矩的矢量。
3基于虚拟现实的单点系泊下船舶运动分析
虚拟现实技术是近年来出现的高新技术,也称灵境技术或人工环境。虚拟现实是利用电脑模拟产生一个三维空间的虚拟世界,提供使用者关于视觉、听觉、触觉等感官的模拟,让使用者如同身历其境一般,可以及时、没有限制地观察三度空间内的事物。[7]
为了突出虚拟现实的沉浸感、真实感,本文利用Maya建模和Unity3D进行虚拟环境的搭建。
3.1 Maya建模
Autodesk Maya是美国Autodesk公司出品的世界顶级的三维动画软件,应用对象是专业的影视广告,角色动画,电影特技等。Maya功能完善,工作灵活,制作效率极高,渲染真实感极强,是电影级别的高端制作软件。

图1 三维建模流程图Fig.1 Three-dimensional modeling of the flow chart
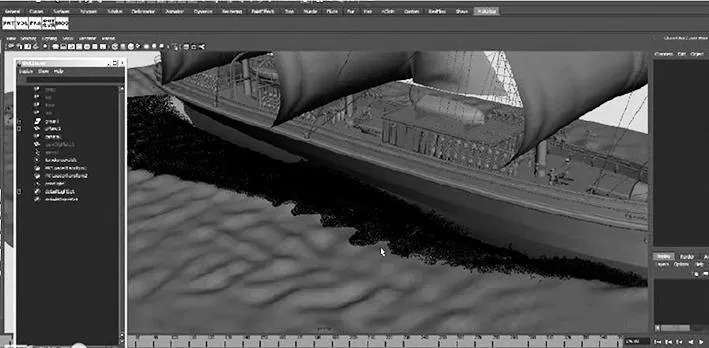
图2 maya制作的船舶模型Fig.2 Ship models
图2为本文用maya制作的船舶模型。
3.2 Unity3D虚拟现实技术
Unity3D是一个能够轻松实现创作的多平台虚拟现实开发工具,能实现三维场景仿真、实时三维动画等类型互动内容,其特点是引擎构架好,各功能接口丰富,支持多平台发布。
Unity3D的视觉编辑特点是能够很好地与实际环境相匹配。其优势包括Unity3D带有用户便利的物理引擎来帮助实现现实世界中的重力等物理现象和场景中所需的逼真绚丽特技,所以它较适合快速开发虚拟环境下的仿真系统。在本文涉及的虚拟船舶运动场景编辑中,需要编辑大量的prefab封装对象以便于其他场景直接调用来提高系统的效率,在所有的gameobject对象中都有属于它的特定属性,同时把Unity3D的脚本绑定在对象物体上来控制它的运动。
3.3 基于虚拟现实的单点系泊下船舶运动分析
单点系泊下船舶运动模型施加以船舶运行中简化后的激励等以得到其驱动响应的方法可用来对船舶进行动力学仿真,分析现实中船舶运行的稳定性、平稳性等,通过使用Unity3D脚本程序进行相关的参数绑定,从而实现船舶的动力驱动等仿真。
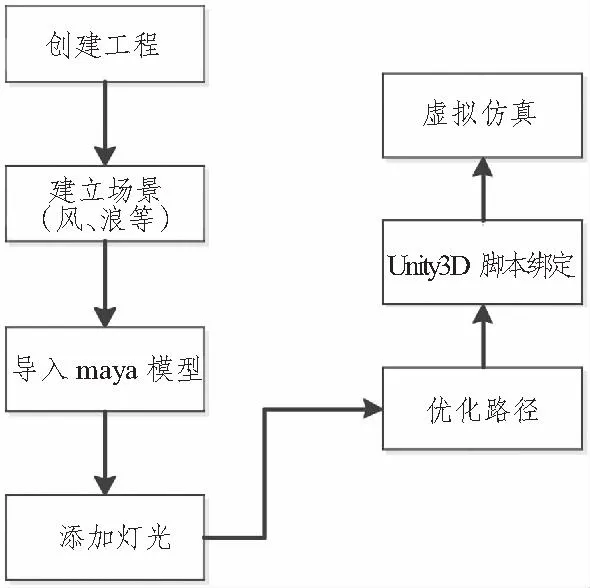
图3 虚拟仿真流程图Fig.3 Virtual simulation flow chart
利用以上流程图验证单点系泊下船舶的平衡位置。
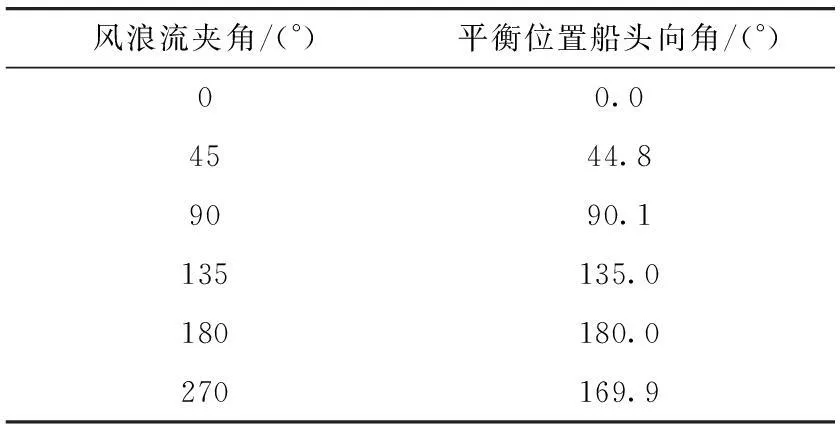
表2 船舶在风浪影响下平衡位置验证
结果表明,单点系泊下建立的船舶运动模型在外界力的干扰下会在平衡位置做小幅度摆动,对于船舶的定位可靠。
4结语
本文研究了单点系泊下船舶的运动数学模型,利用maya建立船舶模型,以及利用Unity3D搭建虚拟环境来实现船舶的运动仿真,通过仿真结果验证了所设计的控制器有效性。
参考文献:
[1]古文贤.单锚泊船的偏荡运动(一)[J].世界海运,1996(4):51-54.
[2]卓永强,杨盐生.船舶锚泊的安全评价[J].中国航海,1999(1):9-15.
[3]杜度,张纬康.单点系泊船舶运动的仿真研究[J].计算机仿真,2003(6):96-99,103.
[4]季春群,王磊,彭涛.单点系泊的系泊稳定性分析[J].中国海洋平台,1998(Z1):12-14,69-70.
[5]井上欣三.关于提高风浪中锚泊安全性的研究[J].航海题本航海学会志,1985(84):28-37.
Ship motion mathematical model and analysis of single point mooring ship
ZENG Li-hua
(Chongqing Vocational Institute of Safty and Technology,Chongqing 404000,China)
Abstract:In recent years, with the development of deep ocean, marine operations become more and more. Research mooring motion model and analyze the movement of single point mooring ship,which can affect the effective control of environmental disturbance forces on the ship movements. The paper establishes a mathematical model of single point mooring ship, use maya to model and utilize Unity3D to build virtual environments to achieve the ship motion simulation. The experimental results show that the effectiveness of the designed model.
Key words:single point mooring ship;Maya modeling;Unity3D;virtual reality
作者简介:曾丽华( 1980 - ) ,女,讲师,研究方向为数学教育。
收稿日期:2014-09-26; 修回日期: 2014-11-07
文章编号:1672-7649(2015)02-0116-04
doi:10.3404/j.issn.1672-7649.2015.02.024
中图分类号:U661.73
文献标识码:A
