火星探测进入、下降、着陆过程通信方案
2015-03-13刘适黄晓峰乔旭君
刘适 黄晓峰 乔旭君
(北京空间飞行器总体设计部, 北京 100094)
火星探测进入、下降、着陆过程通信方案
刘适 黄晓峰 乔旭君
(北京空间飞行器总体设计部, 北京 100094)
基于火星探测任务进入、下降、着陆过程(Entry,Descent and Landing,EDL)的特点,从信号微弱、高多普勒动态和黑障通信等3方面提出了该过程中通信的主要技术难点;简述了国外成功完成火星表面软着陆探测任务——海盗号、“火星探路者”、“火星探测巡视器”、凤凰号、“火星科学实验室”EDL过程采用的通信方案,并在其基础上进行了归纳总结;详细介绍了EDL过程所采用的直接对地通信、中继通信方案组成、通信能力和关键单机等;论述了中继通信、信号调制、信道编码以及黑障分析、防护与减轻等通信关键技术及其工程现状。最后给出了对我国火星探测EDL过程通信技术方案设计的一些建议。
火星探测;软着陆;进入、下降、着陆;通信
1 引言
火星进入、下降、着陆(EDL)过程是火星软着陆探测任务中最为重要的环节之一,而EDL过程中的通信是地面了解探测器工作状态和健康情况的主要渠道,也是火星软着陆任务通信系统设计应关注的重点之一,愈发得到国际航天机构的重视。以1999年的NASA“火星极地着陆器”(Mars Polar Lander,MPL)任务为例,其在EDL过程中不具备通信能力,导致任务在EDL过程失败后,基本上没有数据用于诊断任务失败的原因。同样的情况还出现在欧洲航天局(ESA)2003年的火星着陆器猎兔犬2号(Beagle-2)任务中。在“火星极地着陆器”任务失败后, NASA要求其火星着陆任务均要具备EDL过程通信能力[1]。
本文旨在针对EDL过程通信难点,在总结国外成功火星软着陆任务EDL通信方案的基础上,对EDL过程通信关键技术发展现状进行介绍,为我国未来火星表面探测任务提供参考。
2 EDL过程通信技术难点
EDL过程作为整个软着陆任务的重要环节,其关键事件、关键遥测必须保证实时下传。但EDL过程信道较为恶劣,存在地面接收信号微弱、多普勒动态高和黑障现象等一系列问题,将直接影响信号的正常接收与解调。
1)信号微弱问题
火星软着陆探测器对地直接通信面临着巨大的空间损耗,导致地面接收到的信号十分微弱,约束了探测器下行信息传输能力。同时,由于EDL过程中严苛的气动环境和热环境,以及可能存在的探测器大角度姿态变化,探测器只能采用宽波束低增益天线,通过降低天线增益来提高波束宽度,保证对地覆盖性。这对EDL过程中通信实现提出了更高要求和新的技术难题。
2)高多普勒动态问题
EDL过程动作将导致在探测器发射信号上叠加较高的多普勒动态,包括较大的多普勒变化范围、较高多普勒变化率和多普勒加速度。由于在信号解调过程中需要保持跟踪状态,EDL过程中的高多普勒动态极易导致环路失锁,造成接收端数据丢失。尤其在低信噪比时,高动态与高灵敏度是无法在单机层面同时实现的,所以需要在通信方案设计过程中,从系统级层面寻找解决措施,确保EDL过程中正常通信。
3)黑障现象
火星探测器以高超声速进入火星大气层后,要在短时间内急剧减速,由于大气阻力的作用,使得高速飞行探测器的动能大量转换为热能,当探测器周围的温度达到或超过火星大气电离的阀值温度时,大气分子和部分烧蚀材料便发生电离,在探测器周围形成等离子鞘套。等离子鞘套会严重吸收和散射电磁波,从而产生通信“黑障”现象。黑障现象的产生与探测器的形状、速度、飞行攻角、放热材料和大气密度等因素有关[2]。鉴于黑障现象对火星EDL过程通信的影响,需要在通信方案设计过程中充分考虑、量化分析黑障现象的影响,并开展黑障现象防护和减轻等技术研究。
针对上述通信难点,国外航天机构开展了一系列理论研究与工程实践工作,并积累了丰富的成功经验。后文将对国外成功火星表面软着陆探测任务EDL过程通信方案进行归纳与总结。
3 EDL过程典型通信方案
3.1 概述
目前,人类共进行过15次火星表面软着陆探测,完全成功7次,均由美国完成,分别为海盗-1(Viking-1)、海盗-2(Viking-2)、“火星探路者”(Mars Pathfinder,MPF)、勇气号(Spirit)、机遇号(Opportunity)、凤凰号(Phoenix,PHX)、“火星科学实验室”(Mars Science Laboratory,MSL)。其中,勇气号(Spirit)、机遇号(Opportunity)同属于火星探测巡视器(Mars Exploration Rover,MER)任务。
1976年的海盗-1和海盗-2都由1个轨道器和1个着陆器组成,轨道器与着陆器组合体抵近火星后进入环火轨道。两器分离后,着陆器经历EDL过程着陆火星表面。EDL过程中,着陆器通过轨道器中继转发探测器状态信息。器间通信链路为着陆器至轨道器的单向UHF频段链路,码速率为4 kbit/s。轨道器将接收到的返向信号通过自身S频段下行链路转发地面[3]。
1997年的MPF任务携带1个着陆器和1个巡视器降落火星表面。MPF未进入环火轨道,而是采用直接火星大气进入方式。EDL过程中,探测器持续向地面站发送X频段载波信号,通过 “旗语”信号在EDL序列中关键时刻,表明主要事件的执行情况。在着陆前“旗语”信号是在载波信号上叠加副载波,并且副载波在两个不同频率之间切换。一旦着陆,“旗语”信号仅是简单的开关下行载波[4]。
2003年的MER任务为火星表面巡视探测任务,其EDL采用X频段链路实现全过程对地通信,并在EDL末期增加UHF频段通信[5]。MER向地面站发送X频段载波和“旗语”信号,但不同于MPF任务的少量“旗语”,MER采用了256个“旗语”,该方法被称为多进制频移键控(MFSK)。后壳分离后,MER通过UHF频段器间通信链路向“火星全球勘测者”(Mars Global Surveyor,MGS)发送8 kbit/s返向数据,并通过MGS对地信道转发地面。
2007年的凤凰号是一次火星表面原位探测任务。凤凰号EDL过程中无直接对地通信链路,其利用奥德赛(Odyssey,ODY)、“火星勘测轨道器”(Mars Reconnaissance Orbiter,MRO)和“火星快车”(Mars Express,MEX)提供UHF频段器间通信返向数据的转发支持。凤凰号从进入前2分钟开始发送8 kbit/s返向数据。降落伞打开后,返向码速率提高到32 kbit/s[6]。
2011年的MSL任务借鉴了MER和凤凰号EDL过程通信的成功经验,在EDL过程中采用X频段直接对地通信和UHF频段中继通信相结合的方案。其中,对地通信链路采用了与MER相同的MFSK方案。中继通信链路利用UHF频段器间通信链路,在巡航级分离后开始向ODY、MRO和MEX轨道器发送8 kbit/s返向数据,并转发地面[1]。
综上所述,火星软着陆器EDL过程通信实现的技术途径有两种,分别为直接对地通信和轨道器中继转发通信。其中,中继转发通信链路是由轨道器与软着陆探测器间的器间通信链路和轨道器对地通信链路组成的。两方案各有优劣,前者系统实现简单,后者通信速率相对较高。直接对地通信典型工程案例包括MER、MSL任务,中继转发通信典型工程案例包括PHX和MSL任务。
3.2 直接对地通信方案
1)MER直接对地通信方案
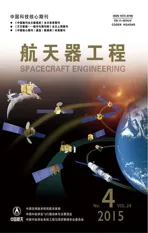
MER任务包括勇气号和机遇号,其通信系统组成相同,由X频段和UHF频段子系统构成,其中,X频段子系统用于支持与NASA的深空网之间通信,UHF频段子系统用于支持后壳分离后与火星轨道器之间通信。EDL全过程中无上行或前向链路[5,7-8]。MER的X频段子系统组成见图1[5]。
X频段子系统的核心单机是小型深空应答机(SDST),见图2。1998年发射的深空-1(Deep Space-1)首次搭载了SDST。之后,SDST成为NASA无人深空探测任务主要选用的应答机产品。在EDL过程中,SDST处于多进制频移键控(MFSK)工作模式。该工作模式中,应答机发送载波和未调制数据的副载波,其信息速率由不同频率副载波的数目和副载波频率变化的速率决定。MER任务中采用了256个不同频率的副载波信号,在同一时刻,仅将其中一个调制在载波信号上。在超音速进入期间,副载波频率每10 s切换一次。开伞后,延长至每20 s切换一次,以便在信噪比快速变化期间信号更易被检测到[8]。
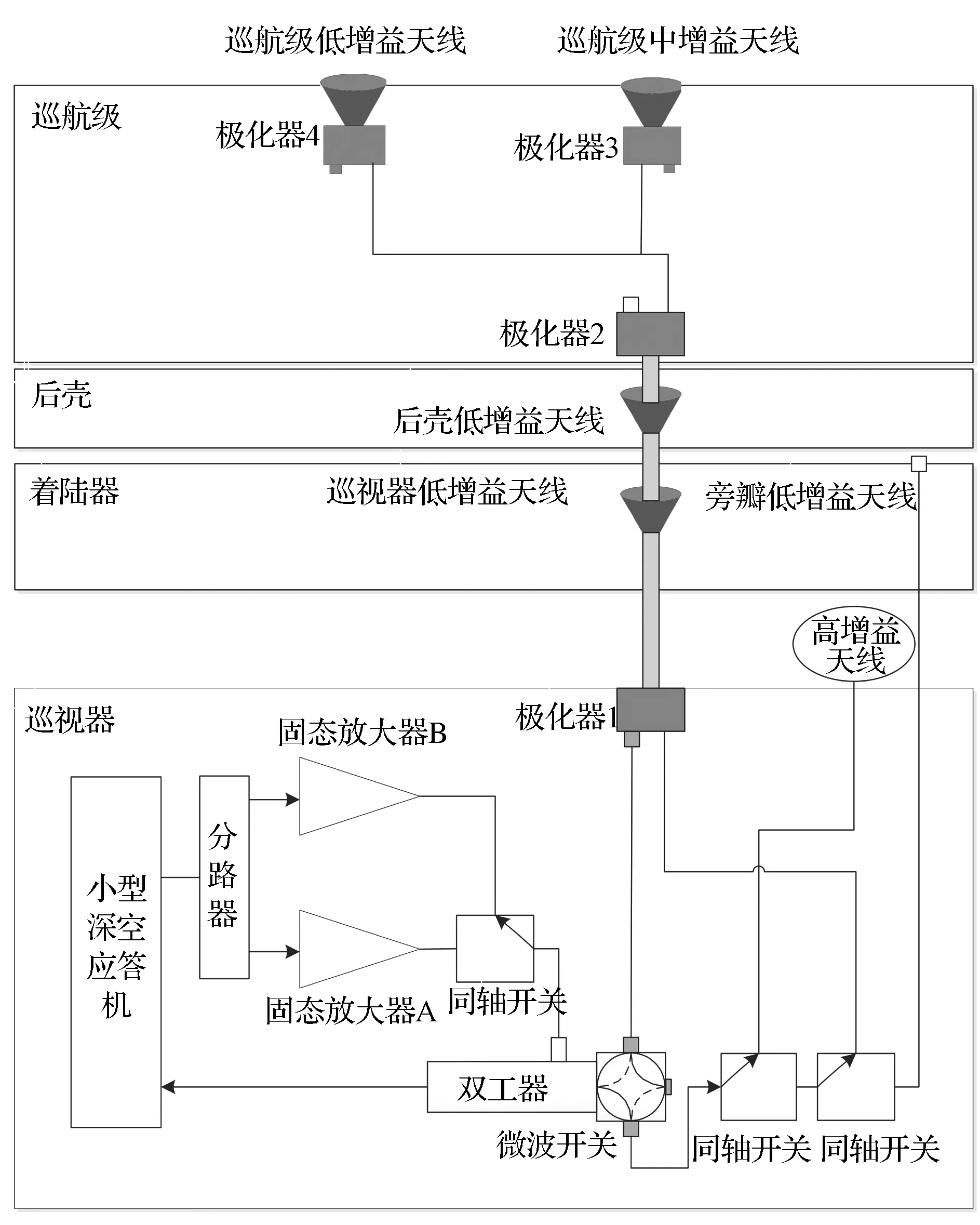
图1 MER任务X频段通信子系统框图Fig.1 Block diagram of MER X band telecommunication subsystem[5]

图2 MER搭载小型深空应答机Fig.2 MER small deep space transponder
X频段子系统由6副天线组成,在EDL过程中使用到其中2副天线,分别为后壳低增益天线和巡视器低增益天线。后壳低增益天线和巡视器低增益天线采用共用波导的设计思路,继承自“火星探路者”任务,后壳分离前采用后壳低增益天线对地通信,后壳分离后使用巡视器低增益天线[5]。
2)MSL直接对地通信方案
“火星科学实验室”通信系统由X频段子系统和UHF频段子系统组成。与MER与凤凰号EDL过程通信系统方案基本一致,“火星科学实验室”通过X频段子系统实现与地面站之间通信,通过UHF频段子系统实现与火星轨道器间通信[1]。“火星科学实验室”X频段通信子系统组成如图3所示[1]。
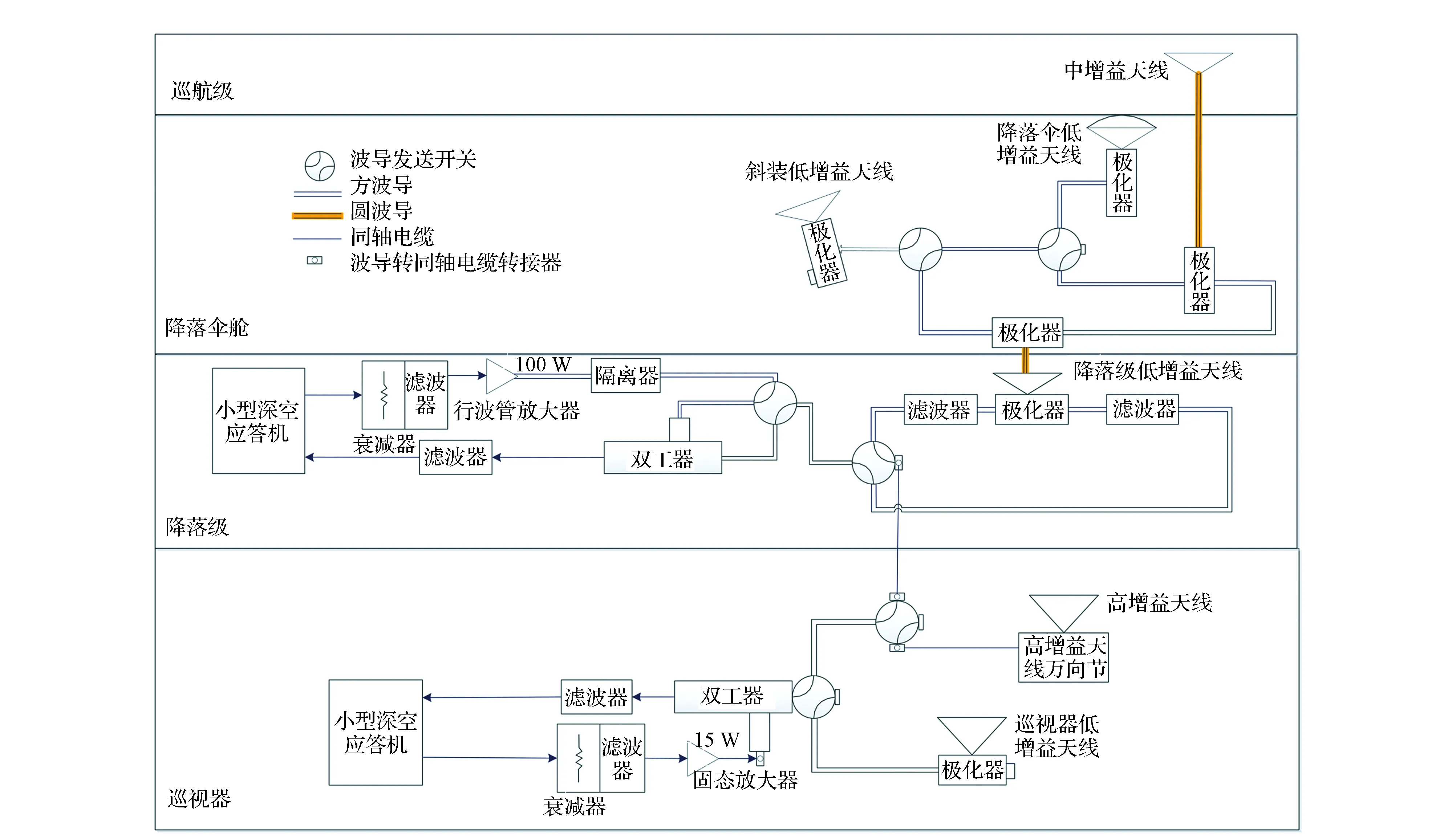
图3 MSL X频段通信系统框图Fig.3 Block diagram of MSL X band telecommunication system
在EDL过程中,X频段子系统主要通过降落级上的小型深空应答机和输出功率100 W的行波管放大器发送MFSK,以实现对地通信功能,MSL采用256个不同频率副载波,副载波切换时间为10 s。X频段子系统先后使用了降落伞低增益天线、斜装低增益天线和降落级低增益天线[1]。降落伞低增益天线和斜装低增益天线采用相同设计,均安装在降落伞舱上,两者安装方向不同,以满足EDL过程中不同阶段天线增益方向图对地面站的覆盖性。降落伞舱分离后,MSL通过降落级低增益天线实现对地通信功能。
3.3 中继通信方案
1)PHX中继通信方案
凤凰号通信系统由X频段测控子系统和UHF频段子系统组成,其中X频段测控子系统安装在巡航级上,当巡航级与着陆器分离后,凤凰号通过UHF频段子系统完成与ODY、MRO和MEX轨道器间的中继通信,满足EDL过程通信需求[6,9]。凤凰号UHF频段通信子系统组成见图4[9]。
凤凰号UHF频段通信系统核心单机是UHF频段收发信机,型号为C/TT-505,MER搭载的也是这一型号的产品[10],见图5。在EDL过程中,ODY、MRO和MEX被用于凤凰号UHF频段返向数据的转发支持。凤凰号在巡航级分离后通过后壳天线发送返向信号载波,进入前2 min在返向载波上调制8 kbit/s数据。降落伞打开后,返向码速率提高到32 kbit/s,直至降着陆1分钟后停止。凤凰号器间通信基于CCSDS组织的邻近空间链路协议(Proximity-1 Space Link Protocol),但由于EDL过程中使用单向传输模式,通信双方无需根据协议进行“握手”[6]。
图4 凤凰号UHF频段通信系统框图Fig.4 Block diagram of Phoenix UHF band telecommunication system
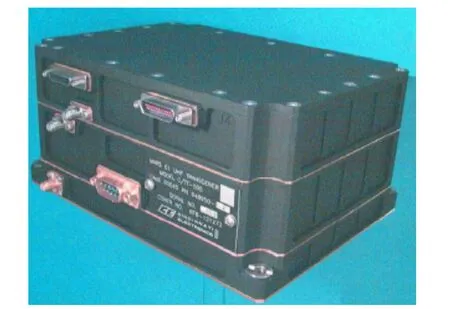
图5 凤凰号搭载UHF频段收发信机Fig.5 PHX UHF transceiver
不同于MER任务,凤凰号为保证巡航级分离后全过程器间通信,在后壳上安装了一副后壳天线,后壳天线采用贴片组阵形式,安装在后壳上,形成近全空间覆盖增益方向图,见图6。当后壳与着陆器分离后,凤凰号使用UHF螺旋天线[6]。
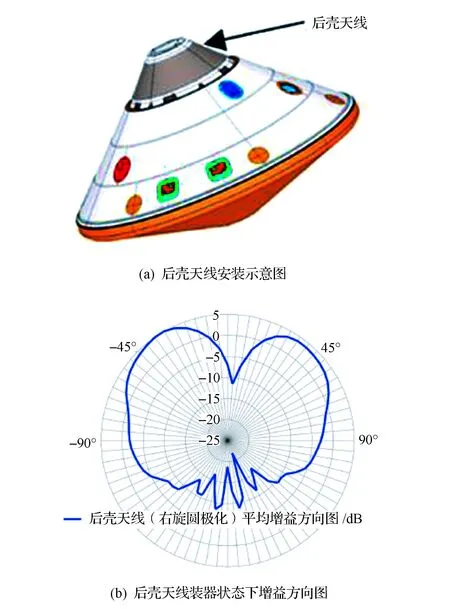
图6 凤凰号后壳天线Fig.6 PHX wrapaound antenna
2)MSL中继通信方案
MSL通过UHF频段通信子系统实现与火星轨道器间通信,其UHF频段通信子系统组成框图分别见图7[1]。
在巡航级分离后直至触地后几分钟,MSL的UHF频段子系统向ODY、MRO和MEX轨道器发送8 kbit/s返向数据,包括健康和状态遥测。UHF频段子系统由两台UHF频段收发信机和3副低增益天线组成。在EDL过程中先后使用了3副UHF频段低增益天线,包括降落伞UHF天线、降落级UHF天线和巡视器UHF天线。其中,降落伞UHF天线采用与PHX任务后壳天线相同的设计思路,满足EDL初期中继通信需求[1]。
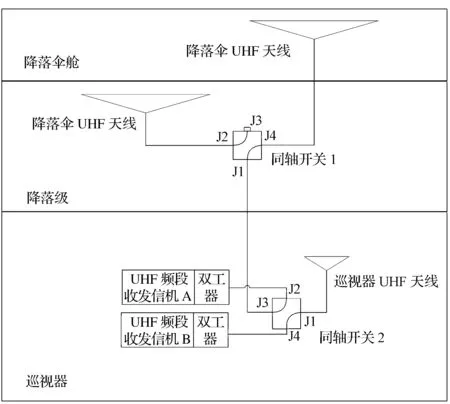
图7 MSL UHF频段通信系统框图Fig.7 Block diagram of MSL UHF band telecommunication system
MSL搭载的UHF频段收发信机型号为Electra-Lite,与MRO上搭载的UHF频段收发信机Electra相比,进行了功能上裁剪,以降低对质量、功耗方面的需求。Electra-Lite支持邻近空间链路协议。相对于C/TT-505等早期UHF频段收发信机型号,Electra和Electra-Lite主要有3方面的改进[12]:
(1)Electra和Electra-Lite收发信机支持最高2048 kbit/s编码后码速率,而MER搭载的C/TT-505收发信机最高支持256 kbit/s,MEX搭载的Melacom收发信机最高支持128 kbit/s。
(2)Electra和Electra-Lite的前向载波频率在435~450 MHz范围内可调,返向载波频率在390~405 MHz范围内可调。C/TT-505和Melacom仅能在固定频率上工作。
(3)Electra和Electra-Lite支持码速率自适应模式(adaptive data rate mode,ADR),即收发信机可以根据实时信噪比特性,自发调整返向链路码速率。而C/TT-505和Melacom在某一弧段内只能采用固定码速率进行传输。但MSL在EDL过程中未采用ADR模式。
4 EDL过程通信关键技术及工程现状
4.1 中继通信技术
受限于器地通信距离较远等因素,EDL过程中探测器直接对地传输的信息速率较低,不足以支撑EDL过程产生的全部数据实时传输。以MER和MSL任务所采用的MFSK方案为例,若采用10 s时间完成1个状态遥测的传送,信息量为8 bit,信息速率为0.8 bit/s。而中继通信具备软着陆与轨道器通信距离近,轨道器直接对地通信能力强的特点,以NASA以往火星软着陆探测器为例,其EDL过程返向器间通信码速率为4~32 kbit/s,远高于软着陆探测器对地通信码速率。在码速率方面,中继通信占有明显优势。
即使在着陆后,探测器具备高增益天线对地通信能力,受限于体积、质量、功耗等方面限制,其对地数据传输能力也极为有限,需要依靠中继通信完成主要传输任务。截至2004年2月17日,机遇号返向数据的79%是通过中继通信链路传输,直接对地通信链路仅完成21%,机遇号中继通信链路返回数据量占比达到了85%[5]。为充分挖掘中继通信链路潜力,MSL任务中器间通信返向链路采用ADR技术,将码速率峰值从MER任务的256 kbit/s提高到2 Mbit/s[12]。
火星探测任务中继通信大致可分为三个发展阶段。第一个阶段以海盗号任务为代表,轨道器仅接收特定着陆器发送的返向信号,并转发地面。第二阶段以MPL任务为代表,其采用火星气球转发协议(Mars Balloon Relay Protocol),该协议没有数据链路层,前向链路用于发送两种单音,用于支持与表面探测器完成返向数据传输。第三个阶段,以MER、PHX和MSL任务为代表,其采用CCSDS组织的邻近空间链路协议,该协议由数据链路层和物理层组成,可以实现表面探测器上行遥控、数据注入以及下行遥测、载荷数据的转发,同时由于数据链路层协议的存在,可以保证器间通信数据按序、正确接收。
4.2 信号调制技术
针对EDL过程中器地信道内高动态、低信噪比特征,选用合适的信号调制技术降低地面站解调难度,对保证EDL过程正常通信具有重要意义。受到火星探路者任务启发,MER引入MFSK方法完成EDL过程通信。MFSK方法通过载波调制不同的副载波表征了探测器不同的健康和工作状态。MFSK信号解调可以通过开环接收机快速完成[11]。MFSK信号的解调不同于深空通信中常采用的BPSK、QPSK等调制方式,地面进行解调时无需进行码元解调,而仅需进行载波和副载波的捕获,将副载波频率通过一定映射关系即可了解遥测信息内容。此外,EDL过程中某些关键事件会导致下行载波频率瞬时较大变化,如降落伞开伞,此时MFSK信号快速捕获的优势相对于传统调制方式将更加明显。由于MFSK方式的优势,其在MSL任务EDL过程和朱诺号(Juno)任务中也得到应用[12]。
4.3 信道编码技术
信道编码是保证信息正确传输的重要手段,是深空通信的关键技术之一,可以通过较小的实现代价达到与提高发射功率、增加天线口径相同的效果。目前,深空探测通信使用的信道编码方式包括卷积码、RS码、RS与卷积级联编码、Turbo码、LDPC码等。其中,LDPC码在编码增益以及误码平台等方面相对于其他编码方式具有明显优势。2013年NASA发射的“火星大气与挥发物演化探测器”(MAVEN)便对中继返向链路提供编码效率为0.5的LDPC码译码支持。分析与测试结果显示,MAVEN所采用LDPC码相对于目前深空领域广泛采用的卷积(7,1/2)码可以提供额外3 dB的编码增益[11]。也就是说,在相同射频设备的基础上,可以降低约一半的发射功率。对器载资源严重受限的深空任务而言,信道编码技术具有重要的意义。
4.4 黑障分析、防护及减轻技术
在载人航天领域,工程人员很早就开始认识到再入地球通信黑障问题,并给予高度重视,获得了一些可喜的研究成果。但由于理论模型的验证和进行可信地面试验等方面工作难度较大,到目前为止还未获得具有普遍意义的工程实用解[13]。在我国深空探测领域,针对火星大气进入的研究工作和火星大气环境数据积累相对较少,这无疑对火星探测EDL过程黑障分析工作造成了相当大的困难。
针对黑障现象的防护及减轻技术,参考文献[2]对国内外相关理论研究、工程实践进行归纳总结,提出3类技术措施,包括改进探测器自身设计、降低天线附近自由电子密度和外加强磁场等,同时也指出每一项技术都有其自身的不足和局限性,并不能单独、完全地解决问题。在实际应用中,需综合考虑目标性能,合理选择方式方法,多种技术措施结合使用,才能最大限度地提高通信质量。
5 启示与建议
火星表面探测是当前航天领域的热点之一, NASA、ESA、俄罗斯联邦航天局均已对外公布了其即将开展的火星表面软着陆探测[14]。在我国未来的火星探测任务规划中,也可能对火星开展软着陆探测。以往火星探测的成功经验,对我国未来火星任务的开展具有重要的参考价值。通过对以往EDL过程通信方案研究、分析,可以得到以下启示:
(1)EDL过程通信类型主要包括直接对地和中继通信两类。由于器地通信距离远大于器间通信距离,一般器间通信速率高于器地通信码速率2~3个数量级。器地通信链路可以完成关键事件完成情况等小数据量信息的传输,中继通信链路可用于传输探测器健康、工作状态遥测等大数据量信息。两类链路若同时采用可以形成异构备份,提高通信系统可靠性。但根据“火星探路者”和凤凰号的经验,仅采用直接对地通信链路或中继链路也可不同程度的实现EDL过程通信功能。
(2)EDL过程采用单向通信工作模式,火星软着陆探测器仅作为发送方向地面站或火星轨道器发送遥测数据,无需采用上行或前向链路。首先,器地双向通信时延和地面人员诊断、发送指令时间远大于EDL过程持续时间,通过地面对探测器实施控制并不可行。其次,火星EDL过程中存在信号功率、频率等大范围波动情况,如高速进入过程中的黑障、降落伞展开、开伞后探测器摆动等,如果要求探测器重传丢失遥测,将可能导致后续产生的实时遥测在有限的时间内无法传回。
(3)EDL全过程通信支持。EDL过程作为火星软着陆任务中的关键环节,应提供全过程支持。EDL全过程通信作用主要有三:首先,跟踪探测器工作状态,提高任务展示度。其次,利用如信号强度、多普勒频移等无线电信号特性反演EDL过程相关数据为后续工程任务提供参考。再次,可作为任务失败后原因分析的重要数据。针对可能导致通信中断的环节,如黑障、开伞引发的高动态多普勒等问题,需要进行充分分析,并采取相应措施,使其工程影响降至最低。
(4)EDL通信天线一般选择宽波束低增益天线。为适应EDL过程中软着陆探测器较大的姿态变化范围,保证通信双方的可视性,提高可靠性,需要通信天线具有宽波束特性。但宽波束天线增益较低,将对链路性能造成一定损失,所以在确定天线波束时要从天线波束覆盖范围和链路性能两方面进行考虑,选取平衡点。
(5)为保证EDL通信方案顺利实施,在方案设计过程中还要重视以下内容。首先,通信弧度是EDL过程通信的重要前提,需要保证器地间或探测器间几何可见。这就对任务总体设计层面提出了约束,如探测器火星大气进入时机、进入方式,以及EDL过程中轨道器位置等。其次,通信方案应针对火星软着陆探测任务实际开展设计,通信实现的技术途径应紧密结合EDL过程时序,功能、性能设计与设备配置要围绕全过程通信链路的可靠性、稳定性、实用性开展。
References)
[1]Schratz Brian C, Soriano Melissa, Ilott Peter, et al. Telecommunications performance during entry, descent, and landing of the Mars Science Laboratory[J]. Journal of Spacecraft and Rockets, 2014, 51(4): 1237-1250
[2]崔平远, 窦强, 高艾. 火星大气进入段通信“黑障”问题研究综述[J]. 宇航学报, 2014, 35(1): 1-12
Cui Pingyuan, Dou Qiang, Gao Ai. Review of communication blackout problems encountered during Mars entry phase[J]. Journal of Astronautics, 2014, 35(1): 1-12
[3]Cooley C G, Lewis J G. Viking 75 project: Viking lander system primary mission performance report, NASA-CR-145148[R]. Washington: NASA, 1977
[4]Wood G E, Asmar S W, Rebold T A, et al. Mars Pathfinder entry, descent, and landing communications, Telecommunications and Data Acquisition Progress Report 42-131[R]. Pasadena: JPL, 1997
[5]Estabrook P, Barbieri A J, Edwards C D, et al. Mars Exploration Rovers: telecom system design and operation highlights, 20060043392[R]. Pasadina: JPL, 2004
[6]Kornfeld Richard P; Garcia Mark D; Craig Lynn E, et al. Entry, descent, and landing communications for the 2007 Phoenix Mars lander[J]. Journal of Spacecraft and Rockets, 2008, 45(3): 534-567
[7]Edwards C D, Barbieri A, Brower E, et al. A Martian telecommunications network: UHF relay support of the Mars Exploration Rovers by the Mars Global Surveyor, Mars Odyssey, and Mars Express Orbiters, 20070023754[R]. Pasadina: JPL, 2004
[8]Hurd William J, Estabrook P, Racho Caroline S, et al. Critical spacecraft-to-earth communications for Mars Exploration Rover (MER) entry, descent and landing, 20060043962[R]. Pasadina: JPL, 2002
[9]Lewicki Christopher A, Krajewski Joel, Ilott Peter, et al. Phoenix Mars scout UHF relay-only operations, 20070017405[R]. Pasadina: JPL, 2006
[10]Schmitz Peter, Signori Gina, Varghese Phil, et al. Telecommunications relay support of the Mars Phoenix lander mission[C]// 2010 IEEE Aerospace Conference. New York: IEEE, 2010
[11]Soriano Melissa, Finley Susan, Jongeling Andre, et al. Spacecraft-to-earth communications for Juno and Mars Science Laboratory critical events[C]// 2012 IEEE Aerospace Conference. New York: IEEE, 2012
[12]Edwards, Charles D, Arnold Bradford W, Bell, David J, et al. Relay support for the Mars Science Laboratory and the coming decade of Mars relay network evolution[C]// 2012 IEEE Aerospace Conference. New York: IEEE, 2012
[13]王家胜, 杨显强, 经姚翔, 等. 钝头型航天器再入通信黑障及对策研究[J]. 航天器工程, 2014, 23(1): 6-16
Wang Jiasheng, Yang Xianqiang, Jing Yaoxiang, et al. On the communication blackout during reentry of blunt-nosed spacecraft and its eliminating approaches[J]. Spacecraft Engineering,2014, 23(1): 6-16
[14]Edwards C D, Barela P R, Gladden R E, et al. Replenishing the Mars relay network[C]// 2014 IEEE Aerospace Conference. New York: IEEE, 2014
(编辑:张小琳)
Telecommunication System Scheme for Mars Probe During EDL
LIU Shi HUANG Xiaofeng QIAO Xujun
(Beijing Institute of Spacecraft System Engineering, Beijing 100094, China)
Based on the characteristics of telecommunication for Mars EDL mission, the paper proposes technical challenges which include weak signal strength, highly dynamic Doppler shift, and blackout. The direct-to-earth and relay telecommunication scheme successfully used in the Mars soft-landing exploration, such as Viking, Mars Pathfinder, Mars Exploration Rover, Phoenix and Mars Science Laboratory are reviewed in terms of subsystem composition, communication ability and key equipment. Key techniques are introduced, such as relay communication, modulation, coding and blackout. Finally, some enlightenment for EDL telecommunication system scheme are proposed.
Mars exploration; soft landing; EDL; telecommunication
2015-06-23;
2015-07-07
刘适,男,硕士,工程师,从事深空探测器总体设计工作。Email:liushi19841984@sohu.com。
V443.1
A
10.3969/j.issn.1673-8748.2015.04.016