GEO卫星图像定位配准技术及仿真验证研究
2015-03-13许海玉王皓沈毅力边志强钱勇
许海玉 王皓 沈毅力 边志强 钱勇
(上海卫星工程研究所, 上海 200240)
GEO卫星图像定位配准技术及仿真验证研究
许海玉 王皓 沈毅力 边志强 钱勇
(上海卫星工程研究所, 上海 200240)
介绍了图像定位与配准基本原理,建立了补偿量数学模型,运用实时仿真系统代替有效载荷扫描辐射计、大气垂直探测仪及姿轨控等相关分系统模拟了卫星在轨工作状况,对图像定位与配准技术进行了仿真验证研究,结果表明:该验证方法合理有效,可为图像定位配准系统设计及在轨应用提供参考依据。
图像定位与配准;动态补偿;力矩补偿;实时仿真系统
1 引言
随着航天遥感对地观测技术的不断发展,遥感卫星获取图像的分辨率越来越高,其应用也越来越广泛,为了满足我国第二代地球静止轨道气象卫星观测能力更高的需求,我国第二代地球静止轨道气象卫星将首次采用图像定位与配准(Image Navigation and Registration,INR)技术,以高精度确定气象云图中每个像素的地理位置,为精确预报天气奠定基础。
在轨进行图像定位与配准技术的功能与任务是:通过载荷扫描镜转角增加补偿量的方式,以消除由卫星姿态、轨道及热变形带来的光轴指向偏差;并且进行前馈力矩补偿,以抵消由载荷运动对平台稳定性带来的影响。在美国,类似技术已经成功应用于地球静止环境业务卫星(Geostationara Operational Environmental Satellite,GOES)系列中,并得到了很好的效果。在欧洲,第三代气象卫星(Meteosat Third Generation,MTG)系列也在开发高精度在轨图像定位与配准技术[1-3]。
对于卫星图像定位与配准的研究,文献[4]提出基于预估模型的补偿方法,能够减小扫描镜运动对扫描镜光轴指向的影响,提高扫描镜的成像质量。文献[5]针对两自由度扫描镜图像运动补偿问题,在卫星姿态估计信息的基础上,给出了一种姿态运动补偿算法。文献[6-7]定义了扫描角、步进角和固定网格,分析了轨道运动和结构热变形对静止轨道气象卫星成像的影响,并分别给出了图像运动补偿模型。但上述文献对三种运动补偿算法的流程,补偿时序的正确性缺少联合仿真验证的研究,为此本文应用实时运动补偿模型,搭建了一套仿真验证系统,模拟了卫星在轨工作情况,对运动补偿算法进行了仿真验证。
2 图像定位与配准技术基本原理
在轨引起遥感卫星图像定位配准偏差的主要因素有:安装误差、发射振动变形、热变形、轨道、姿态和时钟误差等原因。其中,安装误差和发射振动变形是一个常值偏差,可在卫星发射入轨后对其进行标定并一次性修正;时钟误差是一个随机量,需要通过提高星上时统精度,降低其对图像定位配准的影响来避免;而轨道变化、姿态运动和热变形都是动态变化的,必须通过实时补偿进行修正。如果能够精确确定卫星平台的姿态、轨道,并能够准确测量遥感仪器的热变形规律,则可通过星载计算机计算补偿角度增量,并驱动卫星有效载荷遥感仪器的二维扫描镜进行星上实时动态补偿,从而实现遥感图像在轨定位与配准,获得高精度图像信息[8]。其中由星载计算机计算得出的二维扫描镜转角增量定义为INR补偿量。
3 补偿量模型
3.1 坐标系定义
地心惯性坐标系OeXiYiZi:坐标原点Oe为地球质心,Xi轴指向J2000.0平春分点在瞬时赤道面上的投影,Zi轴垂直于瞬时赤道面指向北极,Yi轴与Xi轴、Zi轴构成右手直角坐标系。
轨道坐标系OcXoYoZo:坐标原点Oc为卫星的质心,Zo轴指向地心,Yo轴为卫星瞬时轨道面的负法向,Xo轴与Yo轴、Zo轴构成右手直角坐标系,如图1所示。
卫星本体坐标系OcXbYbZb:坐标原点Oc为卫星的质心,Xb轴、Yb轴、Zb轴为卫星的3个几何轴,卫星标称位置时与轨道坐标系重合如图1所示。
定点地球固连坐标系OeXlYlZl:Oe原点位于地心;Xl轴位于赤道平面内,指向卫星标称定点位置,Zl轴垂直赤道平面指向北极;Yl轴与Xl,Zl轴构成右手直角坐标系[6]。
Ail为定点地球固连坐标系到惯性坐标系的坐标转换矩阵;Aoi为惯性坐标系到卫星轨道坐标系的坐标转换矩阵;Abo为卫星轨道坐标系到本体坐标系的坐标转换矩阵[9]。
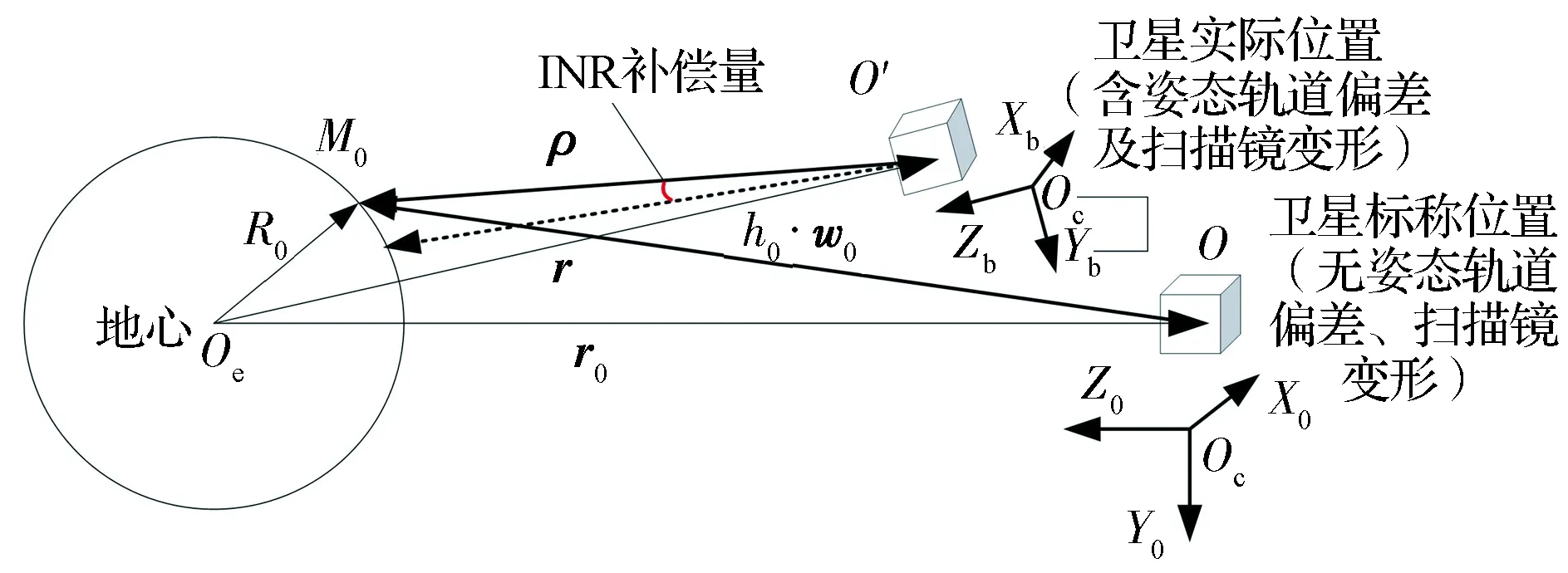
图1 图像定位与配准补偿量示意图Fig.1 Compensation of the INR
3.2 姿态运动补偿建模
姿态运动补偿的功能是通过扫描镜的转角来补偿卫星姿态运动所引起的扫描镜光轴指向偏差,当卫星姿态角为零,有效载荷二维扫描镜转角分别为α0、β0时,有效载荷二维扫描镜光轴矢量P0在轨道系中表示为
(1)


(2)
式中:θ、φ、ψ为卫星三轴姿态角。
进行泰勒级数展开,当卫星姿态为小角度偏差时,可忽略高阶小量[4],得补偿量模型:
(3)
3.3 轨道运动补偿模型
轨道运动补偿是指卫星在一个非标称轨道位置上,通过对扫描镜的扫描角度补偿,实现光轴对地球标称网格的扫描[6]。
卫星在定点固连坐标系下的实际位置矢量Rf可以表示为
Rf=ApAsAnr
(4)
式中:r为惯性系下卫星实际位置矢量为已知量,An为岁差和章动变换矩阵,Ap为极移变换矩阵,对应2015年1月1日12:00,An、Ap取值为

As为卫星恒星时角加定点位置旋转矩阵,
(5)
式中:λ为恒星时角,卫星定点于东经105°。在定点固连坐标系下由图 1可得的矢量关系:
ρ=h0w0-(Rf-r0)
(6)
式中:r0为卫星标称定点位置矢量,h0、w0分别为卫星二维扫描镜光轴对应地面遥感点的视线距离和视线单位矢量,M0为w0与地球表面的交点,点M0位置矢量为R0,可表示为R0=r0+h0w0,且点M0满足地球标准椭球体表面方程:
(7)
式中:X、Y、Z为M0的三轴坐标,ae为地球标准椭球体的赤道半径,e为地球标准椭球体的第一偏心率[6,10]。
卫星在标称位置二维扫描镜转角分别为α0、β0所对应的地面成像点为M0,轨道运动补偿到标称网格点,卫星在实际位置二维扫描镜转角分别为α、β时所对应的地面成像点也是M0,即有关系式:
(8)

3.4 热变形运动补偿建模
热变形运动补偿主要用于补偿卫星平台和有效载荷仪器内部扫描镜的热变形所致的有效载荷视轴指向变化,当光线进入有效载荷遮光罩后,经二维扫描镜两次反射,进入探测器成像,为便于描述,如图2所示光路可逆,光线从探测器发出,经过两次扫描镜反射,图像定位与配准是基于探测器中心矢量rc进行,应用6个等效失配角参数建立热变形运动补偿模型[7]。
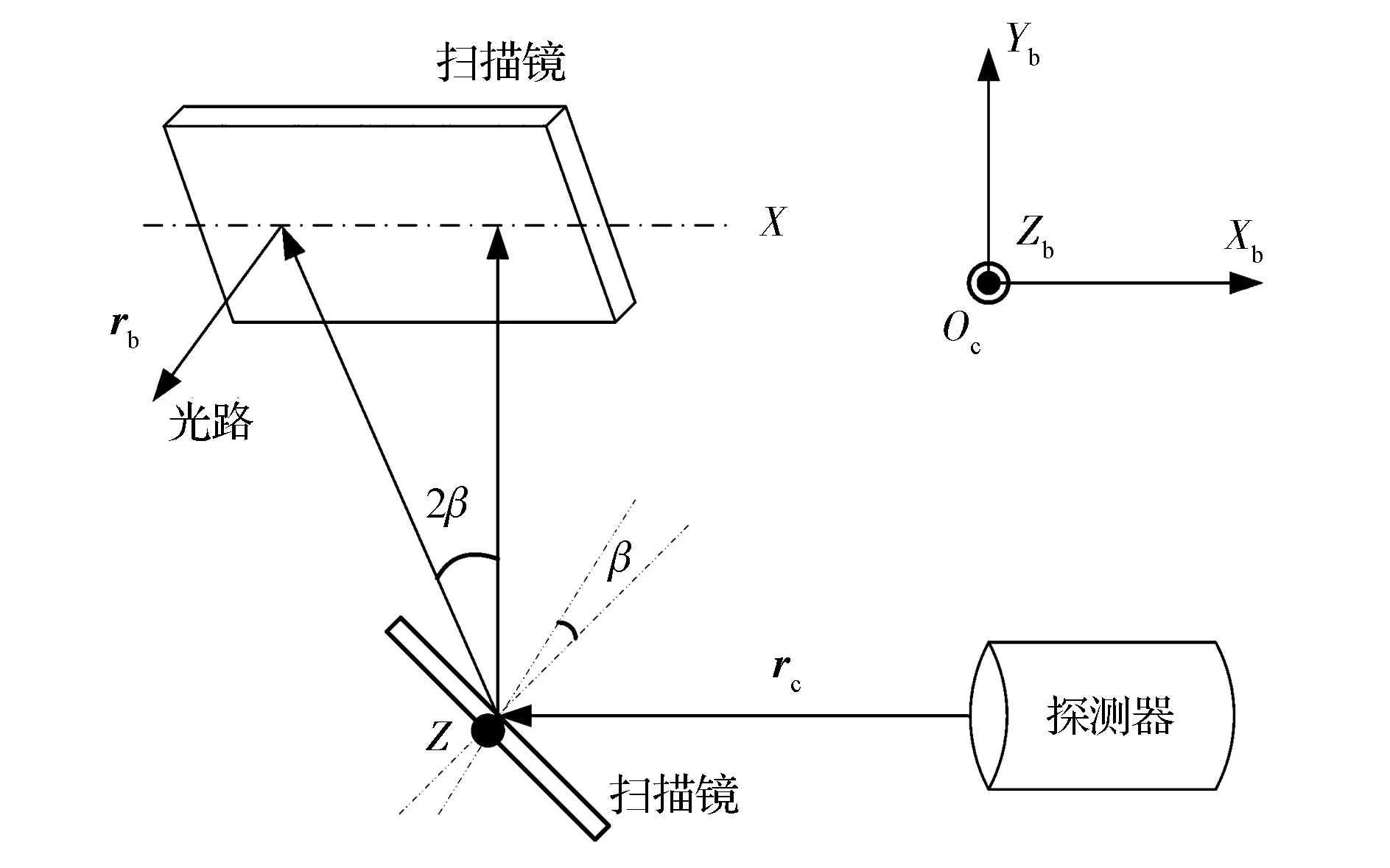
图2 有效载荷扫描镜成像光路Fig.2 Optical path of payload scan mirror
(9)
4 仿真验证系统组成及原理
4.1 仿真系统组成
仿真验证系统由5个部分组成:①数管计算机及图像定位与配准协处理器;②有效载荷分系统模拟器;③动力学与姿轨控模拟器;④地面遥测遥控系统;⑤性能验证评估系统。
1)数管计算机及图像定位与配准协处理器
图像定位与配准软件采用Ada语言程序编写算法,运行在图像定位与配准协处理器当中。数管计算机运行数管软件负责接收地面上注的有效载荷工作指令及初始化参数设置。图像定位与配准协处理器与数管计算机采用共享缓存的方式,进行信息的读写。
2)有效载荷分系统模拟器
3)动力学与姿轨控模拟器
动力学与姿轨控模拟器采用Hisim实时仿真系统,其主要功能是实时计算卫星姿态参数、轨道参数,作为图像定位与配准的姿态运动补偿,轨道运动补偿的输入条件;同时接收数管计算机的校时信号、有效载荷扫描镜换向信号及有效载荷扫描镜的实测转角,进行前馈力矩补偿。
4)地面遥测遥控系统
通过地面遥测遥控系统上注有效载荷工作指令,图像定位与配准分系统所需要的初始化参数设置,并通过地面遥测遥控系统监控数管计算机工作状态。
5)性能验证评估系统
对该联合仿真系统的数据完整性、有效性作出判断。
4.2 系统原理及框图
在系统运行期间,以数管计算机晶振时间为基准,通过1553B总线向有效载荷模拟器、动力学与姿轨控模拟器发送校时信号,校时信号频率为1 Hz,远程终端收到校时信号后与本地时间进行比较,如果时间差大于1 ms,则接受数管计算机校时,修改本地时间,这样确保了系统各单机之间的时间差小于1 ms,消除了由时钟误差带来的图像定位误差。系统架构如图3 所示。
图像定位与配准分系统收到载荷工作指令后,每5 ms为一个节拍实时计算补偿量,通过RS422串口发送给有效载荷模拟器。
本研究将提取到的mtDNA通过微量分光光度计检测,浓度为860.3 ng/μL,A260/A280值为1.96,A260/A230值为2.08,表明无RNA、蛋白质和离子污染。吸取2 μL提取的mtDNA原液,加入18 μL纯水稀释10倍,以10 ng和30 ng λDNA为对照,电泳检测结果显示条带清晰,表明无RNA污染和蛋白质残留现象(图3)。进一步使用EcoRⅠ对mtDNA进行酶切,电泳检测结果显示总基因组带型成弥散状,酶切后的mtDNA带型分布均匀(图4)。说明本研究提取到的大豆mtDNA浓度高、质量好。
有效载荷模拟器在收到载荷的工作指令后,按照工作指令,实时计算扫描镜的理论转角,同时接收图像定位与配准分系统的补偿量,将理论转角与补偿量叠加后通过内部传递函数模拟驱动机构执行,得到有效载荷扫描镜的实测转角。有效载荷模拟器将补偿量和实测转角数据存储到上位机中,作为性能评估系统的输入条件。
动力学与姿轨控模拟器每64 ms更新一次卫星姿态参数,每16 s更新一次轨道参数,通过1553B总线发送给数管计算机;有效载荷模拟器通过RS422串口将扫描镜实测转角发送给动力学与姿轨控模拟器,动力学与姿轨控模拟器根据有效载荷工作指令实时计算出补偿力矩,进行前馈力矩补偿。
性能验证评估系统根据有效载荷模拟器输出的实测转角、补偿量,动力学与姿轨控计算机模拟器输出的动力学姿态、轨道递推参数,结合预设的热变形参数对光轴指向精度进行评估,对前馈力矩补偿效果进行评估。
5 补偿算法验证
系统参数初始化设置:INR处理器计算周期为5 ms,通信波特率921.6 kbit/s;有效载荷模拟器仿真步长5 ms;动力学与姿轨控模拟器仿真步长1 ms。
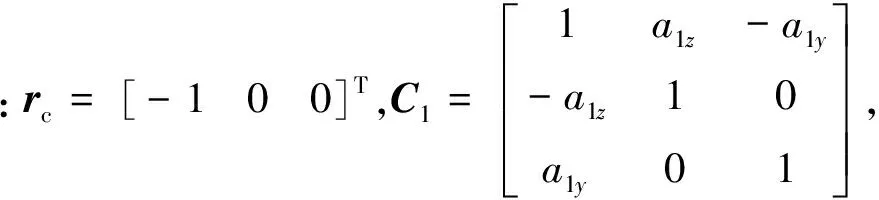
姿态:三轴惯性姿态角速度初值为[0.0002,-0.0040,-0.0003](单位:(°)/s);三轴姿态欧拉角初值为[0.01,0.006,-0.007](单位:°)。
轨道:轨道角速度为7.292×10-5rad/s;卫星东漂移0.001 rad;卫星北漂移0.001 rad;偏心率0.001;轨道倾角0.001 035 rad。
有效载荷南北维和东西维扫描镜惯量分别为0.2 kgm2,0.06 kgm2。
其结果如图 4至图 9所示。
在姿态运动补偿模型中,进行了姿态小角度量化,若姿态角偏大将有较大计算误差;补偿量最大为1190 μrad,光轴在地球全圆盘外,补偿量模型无解,应用时补偿量保持上一拍定值不变,如图7中所示。前馈力矩补偿中的补偿力矩以均值大小进行补偿,将会产生力矩残差,有效载荷的二维扫描镜分别沿卫星的滚动和偏航轴进行步进和扫描,产生力矩的残差将会引起卫星滚动和偏航角速度周期波动,其频率与有效载荷二维扫描镜步进和扫描频率相同,如图8所示。
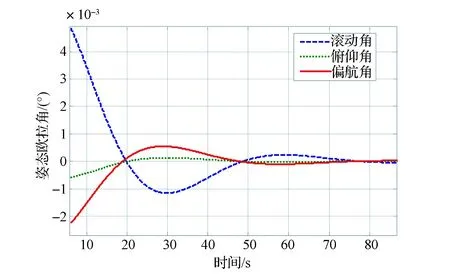
图4 欧拉姿态角变化曲线Fig.4 Curve of Eular angle change
图5 惯性角速度变化曲线Fig.5 Curve of inertial angular velocity change
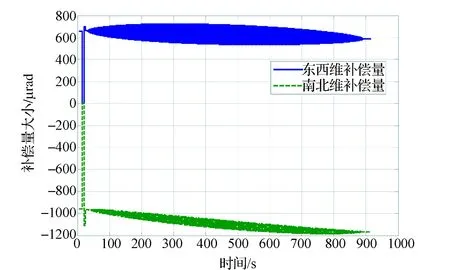
图6 补偿量Fig.6 Compensation
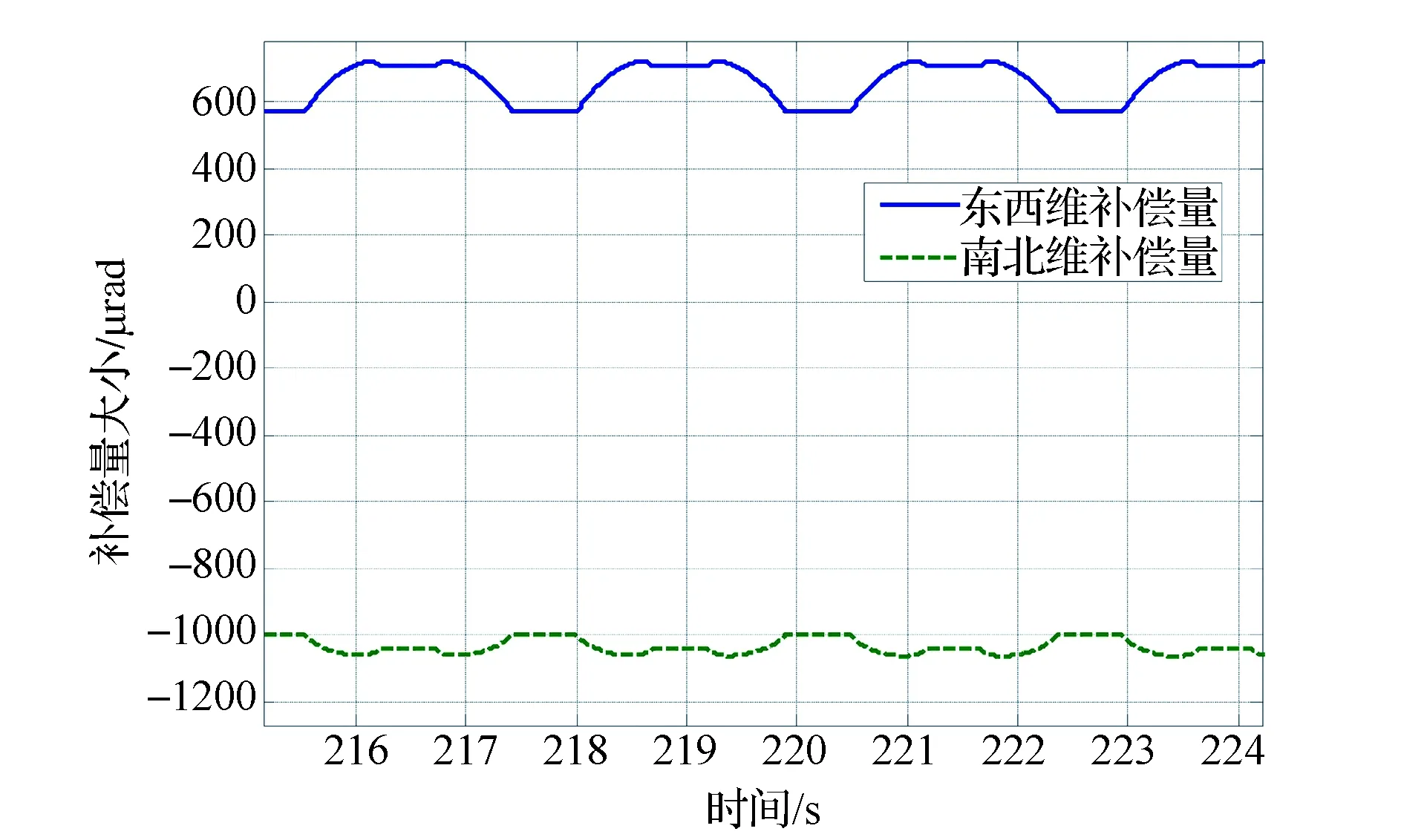
图7 补偿量放大曲线Fig.7 Curve of compensation scale-up
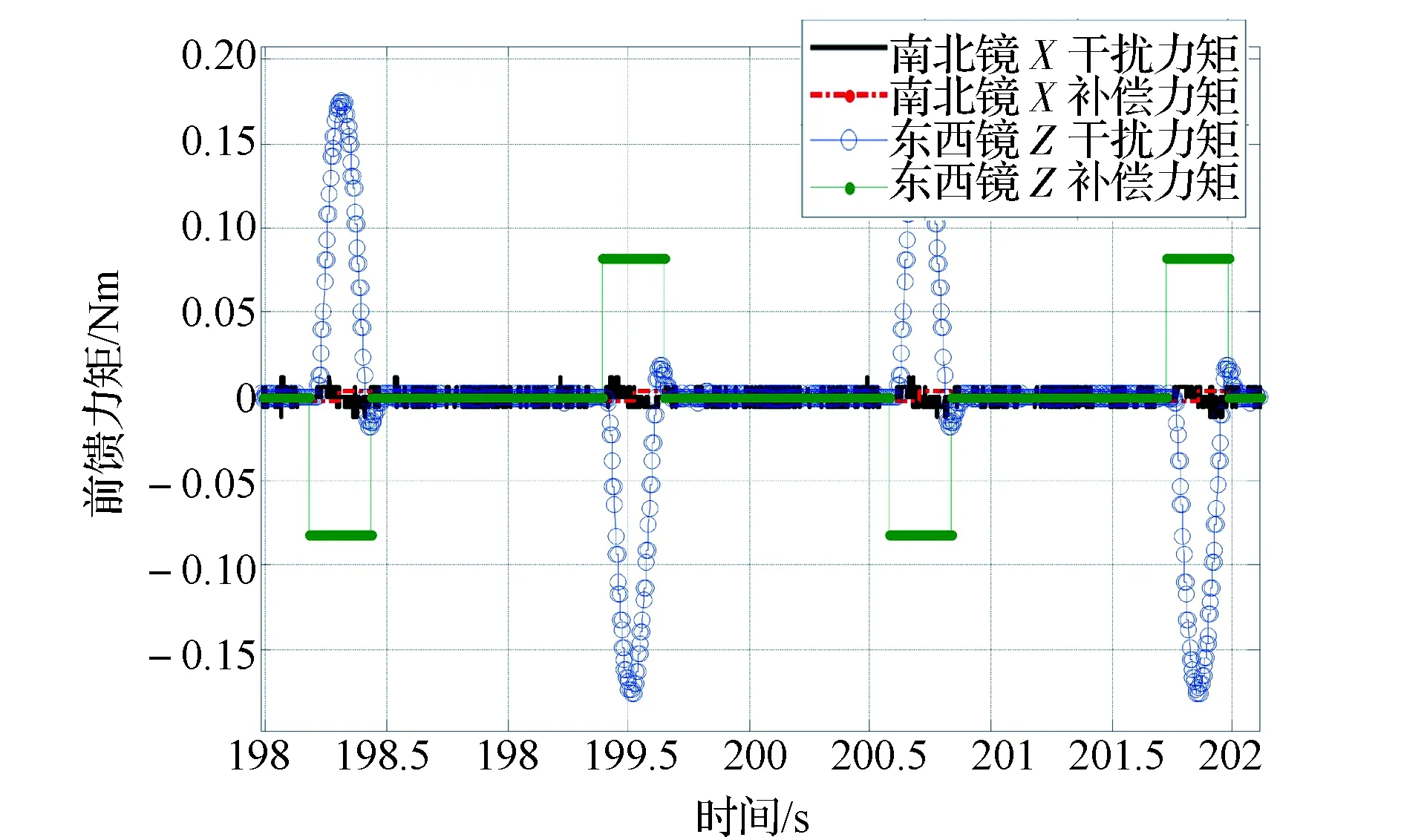
图8 干扰力矩和前馈补偿力矩曲线Fig.8 Disturbance torque and feedforward torque
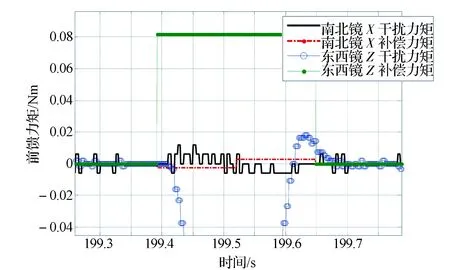
图9 干扰力矩和前馈补偿力矩放大曲线Fig.9 Scale-up curve of disturbance torque and feedforward torque
6 结束语
本文在图像定位与配准原理与补偿量模型的基础上,提出了一种对图像定位与配准技术进行仿真验证的方法,构造了一套图像定位与配准实时仿真系统,验证了图像定位与配准在轨动态补偿整星信息流的匹配性、算法模型的正确性、指标的可实现性,考查了系统软件的可靠性、稳定性。为系统的设计开发及完善提供了参考依据,此外,该仿真验证研究也可用于卫星在轨运行期间的故障判定和反演。
References)
[1]NOAA/NASA.GEO-N series data book (Revision)[M].Washington D.C.:NASA,2009
[2]NOAA/NASA.GEOS-N data book (Rev B)[M].Washington D.C.:NASA,2005
[3]Markley F L,Bauer F H,Deily J J,et al.Attitude control system conceptual for geostationary operational environment satellite spacecraft series[J].Journal of Guidance,Control and Dynamic,1995,18(2):417-419
[4]钱勇,南树军,刘立恒,等.基于模型预估方法补偿扫描镜运动对成像影响分析[J].弹箭与制导学报,2006, 26(3):201-204
Qian Yong,Nan Shujun,Liu liheng,et al.Influence ana-lysis on imaging for scanning camera motion based on predicted model[J]. Journal of Projectiles,Rockets,Missiles and Guidance,2006,26(3):201-204 (in Chinese)
[5]贾英宏.刘勇.徐世杰.航天器两自由度扫描镜图像运动补偿技术研究[J].航天控制,2008,26(1):32-37
Jia Yinghong,liu Yong, Xu Shijie.Image motion compensation for a two-freedom-degree scan mirror of a spacecraft[J]. Aerospace Control,2008,26(1): 32-37 (in Chinese)
[6]钱勇,南树军,李卿.基于图像运动补偿轨道运动和热变形对载荷成像的影响分析[J].上海航天,2008(3): 48-52
Qian Yong,Nan Shujun,Li Qing.Influence of image for scanning camera based on image motion compensation[J]. Aerospace Shanghai,2008(3): 48-52 (in Chinese)
[7]沈毅力,吕旺,于永江,等.用于图像定位与配准的扫描辐射计扫描镜热变形模型研究[J].上海航天,2014(2):26-29
Shen Yili, Lv Wang,Yu Yongjiang, et al.Research of imager scan mirror’s thermal distortion model for image navigation and registration[J].Aerospace Shanghai,2014(2):26-29 (in Chinese)
[8]Lv Wang,Shen Yili,Cheng Weiqiang, et al.The use of onboard real-time dynamical compensation in high-accuracy image navigation of remote sensing satellite[C].13th International Space Conference of Pacific-basin Societies.Kyoto:Japanese Rocket Society,2012,146:465-470
[9]章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,2005
Zhang Renwei. Satellite orbit and attitude dynamics and control[M].Beijing:Beihang University Press,2005 (in Chinese)
[10]陈银超,王志刚,陈士橹.轨道运动对高轨卫星成像的影响及补偿[J].飞行力学,2009,27(3):86-89
Chen Yinchao,Wang Zhigang,Chen Shilu.Influence and compensation of high-orbit satellite imaging based on orbit motion[J].Flight Dynamics,2009,27(3):86-89 (in Chinese)
(编辑:李多)
Study on GEO Satellite Image Navigation & Registration Technology and Simulation Verification
XU Haiyu WANG Hao SHEN Yili BIAN Zhiqiang QIAN Yong
(Shanghai Institute of Satellite Engineering, Shanghai 200240, China)
In this paper, the basic theory of image navigation and registration is introduced, and the compensation mathematical model is founded. Satellite on-board working condition is simulated by the real-time simulation system, and image navigation and registration technology was validated based on co-simulation. The results show that the design of the real-time simulation system is logical, and the system can give a reference for design and on-board use of the INR.
image navigation and registration; dynamical compensation; torque compensation; real-time simulation system
2015-04-20;
2015-05-10
许海玉,男,工程师,从事卫星图像定位配准设计工作。Email:xuecantiandi@163.com。
V414
A
10.3969/j.issn.1673-8748.2015.04.015