空间遥感相机柔性装星结构设计与仿真分析
2015-03-12李庆林魏鑫张凤芹
李庆林 魏鑫 张凤芹
(北京空间机电研究所,北京 100094)
0 引言
卫星在轨运行时,安装空间遥感相机的卫星舱板温度变化较大,由温度变化引起的热应力会影响空间遥感相机的在轨成像品质[1]。因此,研制一种连接空间遥感相机与卫星的柔性装置释放温度变化带来的应力对提高成像品质有重要意义。
空间遥感相机与卫星常用的连接方式是三点静定支撑卸载方式[2]。该方式利用三点支撑,通过分配自由度实现静定支撑,能够实现空间遥感相机与卫星的卸载安装。但该结构支撑刚度较差,很难满足空间遥感相机装星的刚度要求,往往需要增加辅助支撑提高刚度,在轨通过解锁机构解除多余的自由度约束,可靠性低,结构质量较大。目前,文献[3]提出了在连接处设置一定厚度的橡胶环,相当于在两个刚形体之间加入了软弹簧,有效地减小了外部干扰源的振动对成像品质的影响;文献[4]提出了采用轴承支撑元件释放指定约束点的线位移,达到释放热应力的目的。本文提出了一种结构简单、可靠性高的释放热应力的方法,该方法利用柔性铰链的原理在空间遥感相机与卫星连接处根据计算的角度设置不同方向的柔性片,不仅将卫星大底板的热变形卸载掉,同时又能够保证足够的支撑刚度,解决了卫星底板的热变形对空间遥感相机成像品质产生的影响。
1 空间遥感相机柔性支撑结构设计
1.1 柔性支撑结构原理
本文柔性卸载结构是利用柔性铰链原理[5-6]进行设计的,其结构模型如图1所示。柔性铰链能够提供竖直方向、沿柔性片方向的刚度,在该方向上具有一定程度的位移卸载能力。这样通过与卫星连接的四个安装脚处合理选择自由度释放方向,就能够实现保证一定支撑刚度的前提下卸载掉卫星载荷舱顶部构架热变形引起的热应力[7]。
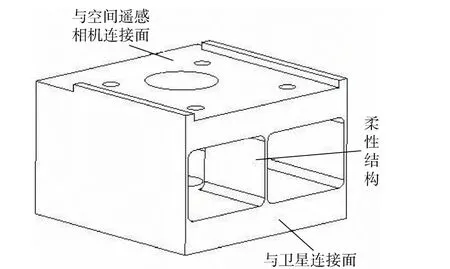
图1 本文设计的柔性结构模型Fig.1 Diagram of the flexible structure
在空间遥感相机与卫星相连接的四个柔性支撑结构中,一个安装脚采用固定约束,另外三个安装脚根据空间遥感相机构型设置不同方向的柔性铰链,实现空间遥感相机相对于卫星的准静定支撑方式和对卫星舱板热变形的卸载。如图2所示的安装位置,A处为固支点,其余三处根据不同约束情况设计了不同的柔性支撑结构[8-9]。A处的柔性支撑结构采用十字交叉方向放置柔性片,B和D处的柔性支撑结构采用与安装点连线垂直方向放置柔性片,C处的柔性支撑结构采用与安装点对角线垂直方向放置柔性片,图中箭头所示为各柔性装置卸载热应力的方向。

图2 空间遥感相机四个安装脚卸载方向示意Fig.2 Diagram of unloading structure on four feet of space remote sensing camera
1.2 柔性支撑结构设计
柔性支撑结构设计主要考虑柔性片的厚度、高度以及角度等因素[10-11]。主要从下面两点对结构进行分析:
1)自由度释放方向的确定,利用有限元仿真分析手段确定每个支撑结构的最佳自由度释放方向,判据是反射镜角度变化最小;
2)柔性支撑结构的构型优化设计,通过优化柔性片的数量、高度、厚度等参数,目标是在对空间遥感相机装星刚度减小最小的条件下最大限度地释放卫星底板的热变形。
根据以上两方面的分析,柔性支撑结构的柔性片的高度范围为10~40mm,厚度范围为0.5~3mm。结合某型号空间遥感相机实际情况选取柔性片的高度为20mm,固支点处采用十字交叉方向放置柔性片,其余安装位置采用三片柔性片结构,柔性片的放置角度有两种形式[12],其中一种柔性片角度为90°放置,另一种柔性片角度为60°放置,具体模型见图3所示。

图3 柔性结构示意Fig.3 Diagram of the flexible structure
2 柔性片结构仿真优化
在确定了柔性支撑结构的高度和柔性片数量后,利用Patran/Nastran有限元分析软件对柔性片的厚度及选材进行了仿真优化分析。选取了厚度分别为1.0、1.5、2.5、3.0 mm,材料分别为钛合金和铝合金共八种组合方案,从热变形和空间相机整机模态两方面进行了优选,优选目标是卫星对空间遥感相机的要求,一阶模态大于100Hz,反射镜变化小于10″[13]。
2.1 热变形分析
卫星舱板一般温度控制范围在0~25℃之间,空间遥感相机一般温度控制范围在18~22℃之间,热变形分析采用的工况设置为空间遥感相机温度为20℃,卫星舱板温度波动5℃。空间遥感相机以三反离轴式光学系统为研究对象,该光学系统由三块反射镜组成,分析在卫星温度变化 5℃时引起的结构变形对空间遥感相机中三块反射镜角度变化情况[14-15],以三块反射镜角度变化值来衡量柔性卸载结构的性能,角度变化越小,柔性卸载结构性能越高。仿真分析时,统计三块反射镜在卫星舱板温度变化 5℃前后,其背部平面相对自身的偏转角度,见表1所示。

表1 柔性结构热卸载能力分析结果表Tab. 1 Analysis results of the thermal unloading of the flexible structure
分析结果显示,铝合金材料比钛合金材料卸载性能高,同种材料下随着柔性片厚度的增加卸载性能降低,在这八种方案中,铝合金材料1mm厚的结构形式卸载性能最高。
2.2 模态分析
柔性支撑结构性能越高,刚度越差,为保证空间遥感相机顺利通过火箭发射段的振动,需综合考虑柔性结构的柔性和刚度。柔性支撑结构的刚度以其模态进行考核,进行模态分析时,将柔性支撑结构与某型号空间遥感相机相连,约束柔性支撑结构上与卫星连接面中间的圆孔。八种方案下柔性结构模态仿真结果如表2所示。

表2 柔性结构模态分析结果表Tab.2 Results of the modal analysis of the flexible structure
分析结果显示,铝合金材料的模态频率低于钛合金材料,同种材料下随着柔性片厚度的增加模态频率增高,八种方案中钛合金材料3.0mm厚结构形式的模态频率最高。
2.3 优化分析总结
根据优选目标,钛合金材料中1.5、2.5mm和铝合金材料中3.0mm的柔性支撑结构能满足要求,钛合金材料1.5mm厚的柔性支撑结构具有最优的综合性能。
3 空间遥感相机柔性支撑结构的应用
将柔性支撑结构应用于某型号空间遥感相机,该空间遥感相机的外形尺寸为750mm(长)×500mm(宽)×700mm(高)[16]。图4为四个柔性支撑结构安装位置,其中A点位置为十字交叉结构形式,B点和D点位置为90°结构形式,C点位置为60°结构形式。
3.1 力学环境模拟试验
力学环境模拟试验包括正弦振动试验和随机振动试验。试验过程中在相机关键部位粘贴了四个测点,分别位于反射镜一(测点1)、反射镜二(测点2)、反射镜三(测点3)和焦面组件(测点4)。通过试验测出空间遥感相机的一阶固有频率为112Hz,二阶固有频率为167Hz,三阶固有频率为263Hz,其随机振动试验结果如表3所示。
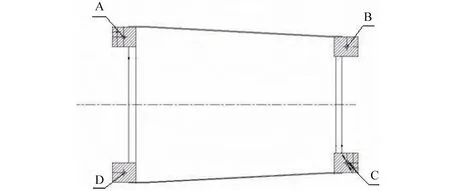
图4 空间遥感相机与柔性结构连接示意Fig.4 Diagram of connection between space remote sensing camera and flexible structure
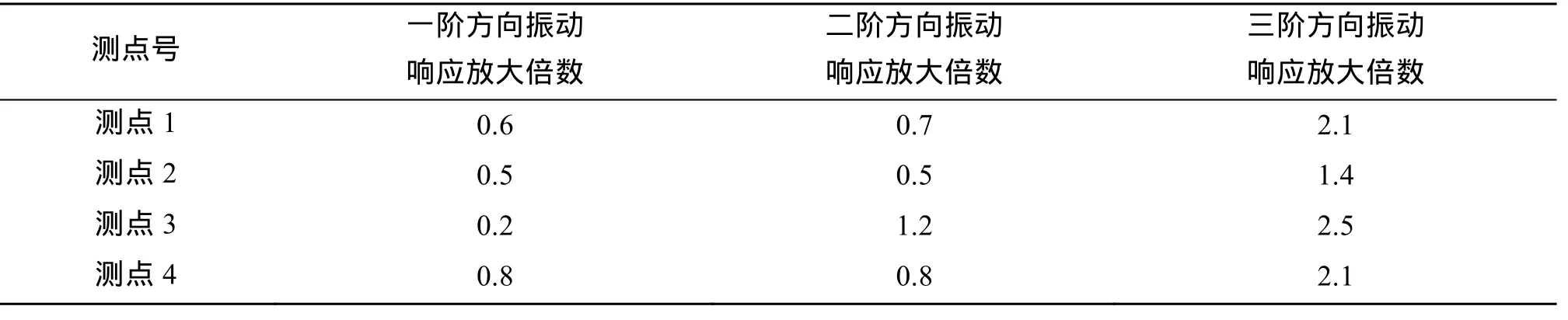
表3 随机振动试验中各测点放大倍数Tab.3 Magnification of measured points in random vibration test
根据空间遥感相机主振固有频率试验数据可以看出一阶频率大于100Hz,能够满足该空间遥感相机发射要求;根据表3随机振动试验数据中的响应放大倍数,将其最大的放大倍数转化成静力学进行空间相机关键部位的强度校核,通过强度计算校核,空间遥感相机关键部位材料的强度具有5倍以上的裕度,能够满足该力学环境模拟试验的要求。
3.2 真空环境模拟热试验
真空热试验利用真空罐来模拟空间遥感相机在轨的环境,其中空间遥感相机外界太阳光照射等环境通过外热流进行模拟,外热流包含高温稳态、高温瞬态、低温稳态和低温瞬态四种状态,对空间遥感相机进行高低温循环试验和温度拉偏试验等试验项目。
真空环境模拟试验以相机调制传递函数(MTF)来衡量柔性卸载结构的性能,空间遥感相机在试验中各个工况下进行了相机MTF测试,各工况下MTF值均大于0.3,不同工况下MTF变化值小于0.02,能满足相机成像指标要求,并具有较好的稳定性。试验结果说明空间遥感相机采用柔性支撑结构起到了较好的热变形卸载效果,结构稳定性较好。
4 结束语
通过对空间遥感相机装星自由度释放装置的计算机仿真分析及试验验证,可以看出该装置方案可以满足空间遥感相机与卫星的连接要求,装星连接方式灵活,适用于各种结构形式的空间遥感相机装星,为空间遥感相机与卫星连接提供了一种新的装配方式。
该装置与现有装星方式相比具有以下优点:
1)分布在不同位置的柔性支撑结构分别布置了不同方向的柔性片,充分考虑到多角度自由度释放的方向,可以有效的卸载卫星大底板由于温度变化而产生的热变形载荷;
2)柔性片的数量、高度以及厚度可以根据空间遥感相机的情况适当调节,以保证空间遥感相机具有足够的刚度,同时使基频满足总体要求;
3)柔性支撑结构件接触面小,结构简单,可靠性高,具有良好的加工性。
(
)
[1] 卢锷, 孙同和, 韩双丽, 等. 空间遥感相机对力学与空间热环境适应性的研究[J]. 光学精密工程, 2003, 11(4):18-23. LU E, SUN Tonghe, HAN Shuangli, et al. Adaptability of Optical Remote Sensors to Mechanical and Space Thermal Environments[J]. Optics and Precision Engineering. 2003, 11(4): 18-23. (in Chinese)
[2] 王建永, 满益云, 傅丹鹰, 等. 国外高分辨率相机与卫星平台连接方式综述[J]. 航天返回与遥感, 2009, 30(4): 36-41. WANG Jianyong, MAN Yiyun, FU Danying, et al. The Summarization of Connection Ways between Foreign High-resolution Camera and Platform[J]. Spacecraft Recovery & Remote Sensing. 2009, 30(4): 36-41. (in Chinese)
[3] 孙德伟, 张广玉, 王武义, 等. 空间相机镜筒柔性支撑结构设计与动力学分析[J]. 机械设计与制造, 2010 (10):1-3. SUN Dewei, ZHANG Guangyu, WANG Wuyi, et al. Structural Design and Dynamic Analysis of the Flexible Support of Body Tube in Space Camera[J]. Machinery Design & Manufacture, 2010 (10): 1-3. (in Chinese)
[4] 费从宇, 崔伟. 支撑元件对平板结构热变形的影响[J]. 强度与环境, 2001 (3): 10-13. FEI Congyu, CUI Wei. The Influence of Support Elements on Thermal Deformation of Plates[J]. Structure & Encironment Engineering, 2001(3): 10-13. (in Chinese)
[5] 王纪武, 陈恳, 李嘉, 等. 典型柔性铰链精度性能的研究[J]. 清华大学学报, 2001, 41(11): 49-52. WANG Jiwu, CHEN Ken, LI Jia, et al. Precision of Typical Flexible Hinges[J]. Tsinghua Univ (Sci & Tech), 2001, 41(11): 49-52. (in Chinese)
[6] 辛洪兵, 郑伟智, 赵罘. 弹性铰链研究[J]. 光学精密工程, 2003, 11(1): 89-93. XIN Hongbing, ZHENG Weizhi, ZHAO Fu. Research on Flexible Hinges[J]. Optics and Precision Engineering, 2003, 11(1): 89-93. (in Chinese)
[7] Choi K B, Lee J J, Kim M Y. Cartwheel Flexure-based Compliant Stage for Large Displacement Driven by a Stack-type Piezoelectric Element[C]. International Conference on Control, Automation and Systems, Seoul, Korea. Piscataway: IEEE, 2007: 2754-2758.
[8] 吴鹰飞, 周兆英. 柔性铰链的设计计算[J]. 工程力学, 2002, 19(6): 136-140. WU Yingfei, ZHOU Zhaoying. Design and Analysis of Flexure Hinges[J]. Engineering Mechanics, 2002, 19(6): 136-140. (in Chinese)
[9] 于靖军, 裴旭, 毕树生, 等. 柔性铰链机构设计方法的研究进展[J]. 机械工程学报, 2010, 46(13): 2-13. YU Jingjun, PEI Xu, BI Shunsheng, et al. State-of-the-arts of Design Method for Flexure Mechanisms[J], Journal of Mechanical Engineering, 2010, 46(13): 2-13. (in Chinese)
[10] LIU Xinjun, WANG Jinsong, WANG Liping, et al. On the Design of 6-DOF Parallel Micro-motion Manipulators[C]. Proc. of the 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Piscataway: IEEEM, 2001: 343-348.
[11] Ryu J W, Gweon D G, Moon K S. Optimal Design of a Flexure Hinge Based XYθ Wafer Stage[J]. Precision Engieering, 1997, 21(1): 18-28.
[12] BI Shusheng, ZHAO Hongzhe, YU Jingjun. Modeling of a Cartwheel Flexural Pivot[J]. Journal of Mechanical Design, 2009, 131(6): 061010-1-061010-9.
[13] 范斌, 蔡伟军, 张孝弘, 等. “资源三号”卫星多光谱相机技术[J]. 航天返回与遥感, 2012, 33(3): 75-84. FAN Bin, CAI Weijun, ZHANG Xiaohong, et al. Technology of the Multi-spectral Camera of ZY-3 Satellite[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(3): 75-84. (in Chinese)
[14] 杨怿, 张伟, 陈时锦, 等. 光机热集成分析中数据转换接口的研究[J]. 宇航学报, 2005, 26(2): 83-87. YANG Yi, ZHANG Wei, CHEN Shijin, et al. Study on Data Transmission Tool for Thermal/Structural/Optical Integrated Analysis[J]. Journal of Astronautics, 2005, 26(2): 83-87. (in Chinese)
[15] 邵登云. 基于热-结构耦合的光学系统热影响分析[D]. 西安电子科技大学, 2010. SHAO Dengyun. The Analysis of Thermal Impact for Optical System Based on Thermal-structure Coupled Theory[D]. Xi’an University of Electronic Science and Technology, 2010. (in Chinese)
[16] 蔡伟军, 范斌, 张凤芹, 等. 多光谱相机高稳定性光机结构设计技术[J]. 航天返回与遥感, 2012, 33(3): 85-92 CAI Weijun, FAN Bin, ZHANG Fengqin, et al. High Opto-mechanical Stability Design of Multi-spectral Camera[J]. Spacecraft Recovery & Remote Sensing. 2012, 33(3): 85-92. (in Chinese)
