无锡地铁综合检测车研制
2015-03-10钮海彦
钮海彦
无锡地铁综合检测车研制
钮海彦
摘 要:无锡地铁综合检测车检测系统采用惯性测量原理、机器视觉
及激光扫描等非接触测量技术,集轨道几何及动态响应、接触轨检测、隧道限界检测和轮轨监视等功能于一车,并应用RFID无线射频技术进行精确里程定位,可快速高效地对城市轨道交通的轨道几何、接触轨状态和隧道及线路周边建筑进行检测。综合检测车各检测系统经静态调试和动态验证,检测指标满足检测要求,已正式应用于无锡地铁的定期检测中。
关键词:地铁;综合检测车;研制
钮海彦:无锡地铁集团有限公司,高级工程师,江苏无锡 214171
轨道状态、接触轨状态和隧道及周边建筑限界的检查和维护,是城市轨道交通安全运营的必要措施。无锡地铁1、2号线建成通车后,迫切需要综合检测设备对基础设施状态进行日常检测。无锡地铁联合中国铁道科学研究院共同研制了一台综合检测车,集轨道几何、接触轨、隧道限界检测和轮轨监视于一体,采用了惯性测量原理、机器视觉以及激光扫描技术,具有测量准确、精度高、速度快的特点,可以极大地减少人工检查和维护的工作量。
1 检测车总体设计与功能
无锡综合检测车各系统设计安装于标准轨距的轨道车上,车辆设计运行速度为80 km/h,检测车车内空间划分为设备操作室、会议室和司机室。设备操作室集中各检测系统的设备操作和数据处理功能。会议室安装有大屏幕显示器,可切换显示各系统的检测数据。车厢两端为司机室,前端司机室设有操作台,可在综合检测车上进行与其联挂机车的起动、调速、制动等操作和整列车的实时监控。检测系统传感设备主要安装于车体下或转向架端部的检测梁上,以及车辆尾端的限界检测模块中。车下设有发电机组,为检测设备和空调机组提供电源,检测车不带走行动力,由机车提供牵引动力,2车联挂后可正反向运行和检测。
综合检测车系统的设计,按功能可分为轨道几何及车体响应、接触轨检测、隧道限界检测、轮轨监视和精确里程定位等5个模块。精确里程定位为其他模块提供速度和里程,并提供采集触发脉冲,轨道几何为隧道限界提供车体修正数据,接触轨检测紧密依靠轨道几何系统的钢轨图像数据。轮轨监视可对车轮和轨道接触点进行视频图像的录制、存储和检索。
综合检测车可检测项目为:
(1)轨道几何,轨距,左(右)轨向,左(右)高低,水平,三角坑,曲率,车体横向加速度,车体垂向加速度,钢轨垂磨、侧磨,速度及地面标志;
(2)接触轨,左(右)导高,左(右)拉出值;
(3)隧道限界,水平方向限界,垂直方向限界,侧面限界,垂直方向振动补偿,水平方向振动补偿。
2 检测系统设计
2.1轨道几何与车体响应
在线路运营中,轨道几何状态良好是车辆安全运行的基础,无锡地铁综合检测车利用惯性测量原理和机器视觉技术,选用高帧频工业面阵相机、红外激光光源、高精度陀螺和加速度计等传感器件,以及工业计算机和QNX实时操作系统,组成了对轨道几何和车体响应实时测量的非接触检测系统。系统分传感器装置、图像采集处理、信号调理监视、实时计算与合成、轨道数据处理等5大模块,其系统构成和测量流程如图1所示。
图像采集处理部分使用激光摄像测量钢轨和接触轨相对于检测梁的横向和纵向位移。加速度计、陀螺、位移计等多种传感器装置响应车体和检测梁的姿态变化,并由信号调理监视模块对模拟信号进行滤波与增益调整。计算及合成模块采用QNX实时操作系统,对模拟信号进行A/D转换、存储、数字滤波、修正以及补偿处理,然后经过综合运算,合成所需的轨道几何和接触轨参数。合成参数和传感器信号发给数据处理模块进行显示、编辑及报表打印。
检测系统在行进的车辆上进行动态检测,就需要建立测量基准。轨道几何检测系统利用惯性测量原理,用安装在车厢内的惯性平台建立水平基准,采用高精度伺服加速度计建立高低和轨向基准。为了消除车辆运行产生的其他加速度的干扰,系统用测量车体摇头和侧滚角速度的角速率陀螺对所测信号进行修正。摇头陀螺还用来测量曲线的曲率和曲线半径。车体响应包括横向加速度和垂向加速度,由安装在车厢内的伺服加速度测得。

图1 轨道几何及接触轨系统结构及测量流程
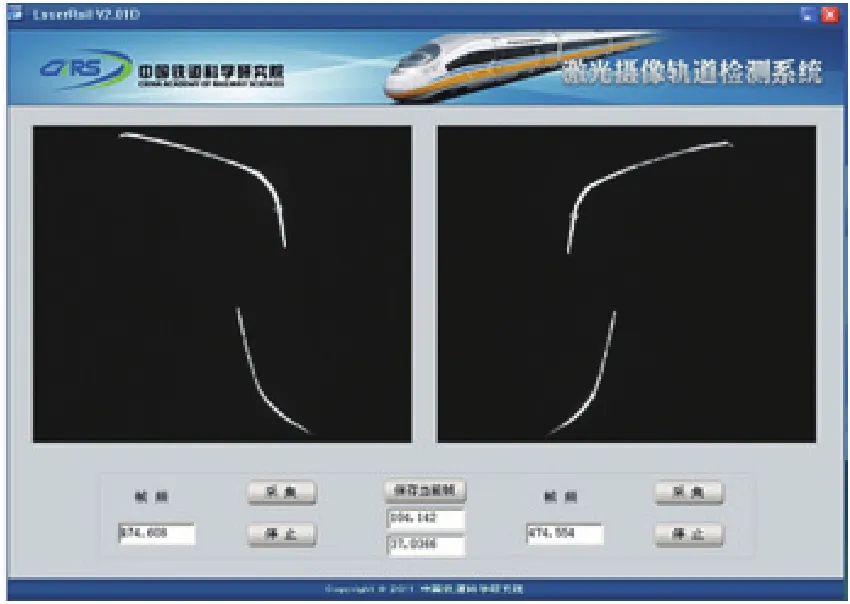
图2 轨道几何钢轨断面图像

图3 综合检测车接触轨激光摄像组件
钢轨的相对位移用机器视觉-结构光测量方式测得。激光在钢轨表面投射一道均匀明亮的光带,高帧频相机采集图像,经滤波、图像细化、质心提取等处理后得到钢轨轮廓的“骨架”图像(图2)。结合摄像机的标定参数,对钢轨轮廓进行像素坐标到物理坐标的转换,通过提取和计算轨距点、轨顶点,以及与标准钢轨截面进行对比,得到轨距、磨耗等检测项目。每对激光器和相机都将独立密封设计的激光摄像组件安装在检测梁上,激光摄像组件易于拆装,便于维护,检测梁经静强度计算和动态疲劳测试,安全性能满足车辆运行的要求。
2.2接触轨检测
无锡地铁1、2号线采用下部受流式接触轨供电,走行轨和接触轨的位置关系直接影响到电客车的供电效率和运营安全,因此,在测量走行轨轨道几何状态的同时,也需要测量接触轨相对于同侧走行轨的横向和纵向位置关系,以及导高和拉出值,接触轨导高和拉出值的测量同样采用机器视觉-结构光方法。
接触轨一般安装在列车运行方向的左侧,在车场或特殊地段会出现在右侧,为了方便上下行检测,无锡地铁综合检测车左右两侧都安装有接触轨激光摄像组件(图3)。综合检测车的接触轨检测和轨道几何检测在系统设计上紧密结合,使结构简洁紧凑。接触轨检测组件和轨距检测的激光摄像组件安装在同一个检测梁上,QNX实时处理计算机同时控制二者的采样及合成计算,而在数据处理端轨道几何和接触轨设计为相互独立的终端,工务(轨道)和供电(接触轨)专业的技术人员可同时进行超限编辑、报表打印和波形浏览。
图4为接触轨的图像采集界面,图中接触轨安装在左侧,通过图像处理和计算得到接触轨钢轨轮廓上特征点的相对位置,以及左侧走行轨轨距点和轨顶点的测量数据,共同合成左接触轨相对于相邻走行轨的导高和拉出值。表1所示为接触轨检测系统的检测项目、测量范围及测量精度。
轨道几何及接触轨的数据处理模块基于Windows环境开发,主要分为波形浏览器、超限编辑及报表打印软件,二者均可在检测中实时操作或检测后线下处理。波形浏览器以波形图显示各项目的检测数据及原始传感器数据,显示通道可选,可浏览、测量、配置和打印,可以txt文本格式导出数据方便第三方处理。波形图的数据显示通道、比例可由用户调节,波形图软件具有历史数据对比功能,用户可对同一线路的2次检测数据进行对比,可快速发现线路的变化。超限编辑及报表打印软件可剔除数据中干扰,对数据进行汇总并报表打印。
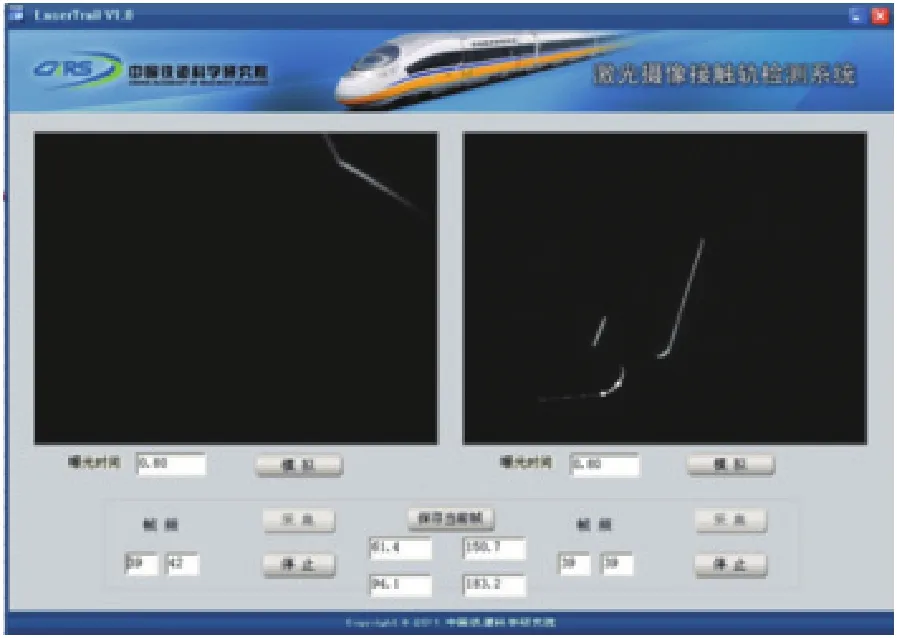
图4 接触轨断面测量图(左侧)

表1 接触轨检测项目及指标

图5 限界测量模块安装位置
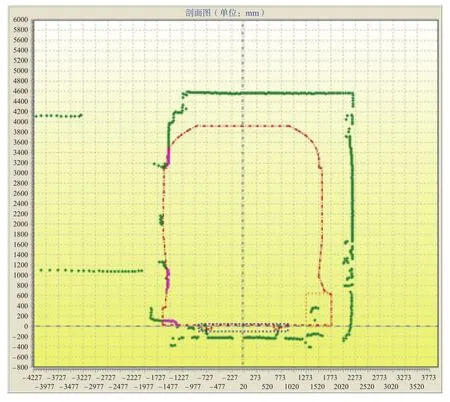
图6 限界侵限图
2.3限界检测
限界检测系统采用激光扫描的测量方法,安装在车辆端端部的测量模块(图5)内集成多台可同步工作的激光扫描传感器,连续不断地测量周围建筑物的断面轮廓信息,测量模块设计有相应的供电、温控、辅助补偿和信号传输等设备,可快速整体安装或拆卸。基于激光扫描的方式使测量快速、准确,检测可在阳光和雨雪情况下正常工作,不易受外界干扰,数据可靠。
测量数据以钢轨顶面及轨道中心线作为测量基准,经实时叠加同时刻的速度、里程、修正补偿等信息和空间坐标变换等数学计算,输出基于轨道中心线的建筑物轮廓数据,以二维和三维的方式实时显示线路周边建筑物轮廓(图6),系统可根据数据库内预置的台帐在线切换限界标准,自动输出检测数据信息和侵限数据,实现限界的动态分析。分析模块还可对数据进行后端分析、处理、展示和报表生成,以全息图的方式来形象展示线路两侧建筑物的实际轮廓。
系统的检测指标如表2所示。2.4 轮轨监视
无锡地铁综合检测车安装了2组轮轨接触状态监视设备,通过车内监视器实时监视车辆运行过程中车轮与轨道的真实接触状态,系统可在视频图像上叠加当前线路名、里程、速度等线路信息后并进行存储。视频分辨率为720×576,帧率25 fps,存储容量为1 TB。存储的视频数据具备按里程或时间进行检索的功能。系统安装有光源,在夜晚的条件下也可正常进行。
2.5里程精确定位
对于轨道维护人员来说,提供检测数据相应的准确现场位置是提高维护效率的关键,里程信息误差较大,现场人员寻找病害的成本就越高。无锡地铁综合检测车采用主备2路高精度光电编码器提供距离脉冲和采样信号,RFID标签提供精确校准信号的方式,定位精度小于1 m。
无锡地铁综合检测车采用RFID电子标签对里程的累计误差或长短链进行修正,电子标签安装在轨道中间,约每5~6 km及长短链处安装1块,车辆驶过该里程点时,车底安装的阅读器会自动识别标签信息,并实时计算出当前的里程,发送给车内各检测系统进行里程的同步校准。当线路的里程信息因维修发生改变时,只需对车上数据库相应的里程进行更改,无需对地面标签进行重新布点。
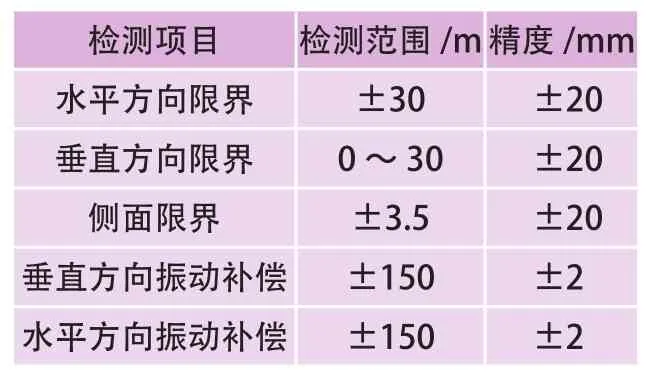
表2 限界检测项目及指标

图7 检测系统实验室验证
3 系统验证与应用
3.1轨道几何及接触轨实验室标定
轨道几何与接触轨检测系统安装前在实验室进行了系统验证,检测设备安装在6自由度高精度振动台上,根据检测系统的标定技术要求,振动台按照一定的频率和振幅做横向和纵向运动及角度侧滚,模拟检测梁在检测情况下的振动,系统安装后进行了整车标定,标定数据满足检修系统的要求(图7)。
3.2轨道几何及接触轨动态验证综合检测车于2014年7~8月份在无锡地铁重复性测试,2次数据间隔为1个月,图8、9分别为轨道几何项目和接触轨项目2次对比中1 km数据的波形图,图中当前的波形数据完全覆盖了历史数据,重复度很高。在剔除速度低于18 km以下数据输出截止的影响,选取对比5 km约40 000个采样数据,各检测项目的重复性指标都大于95.6%,满足检测系统的重复性要求。
2014年9月在无锡地铁现场对综合检测车接触轨检测结果进行了人工验证,方法为选取几段系统检测的接触轨检超限数据,然后用接触轨检测尺进行人工复核。将人工测量和综合检测车的检测结果都导入Excel进行对比(图10),由图10可见二者的检测结果是非常接近的。
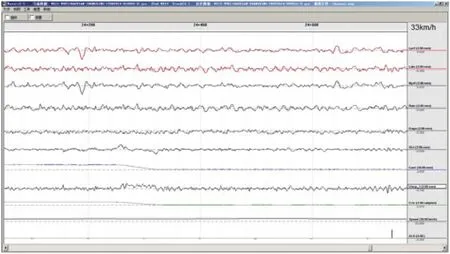
图8 轨道几何重复性波形图
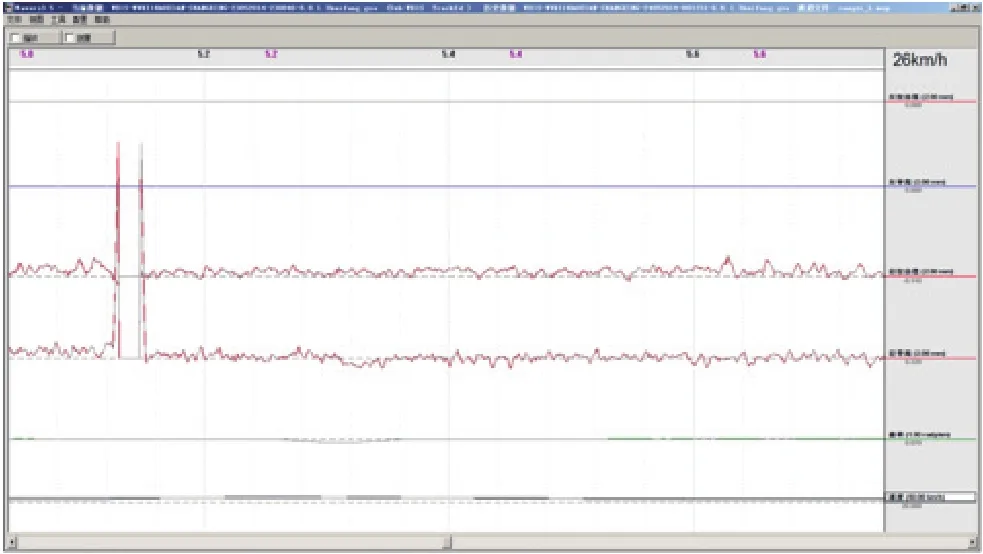
图9 接触轨重复性波形图
3.3限界动态验证
限界的动态验证方法为在无锡地铁西璋车辆段的试车线上道床一侧人为设置标志物,模拟侵限,综合检测车在试车线上进行了多次往返,限界检测系统在运行过程中对侵限标志物进行测量,并将其与人工测量的标志物与线路中心线的距离进行对比验证,表3为试车线现场记录的数据及对比分析结果。试验中的模拟侵限标志物的位置均能准确地检测到,从表3中可以看到偏差值最大为16 mm,最小为2 mm,满足系统技术指标±20 mm的技术要求。
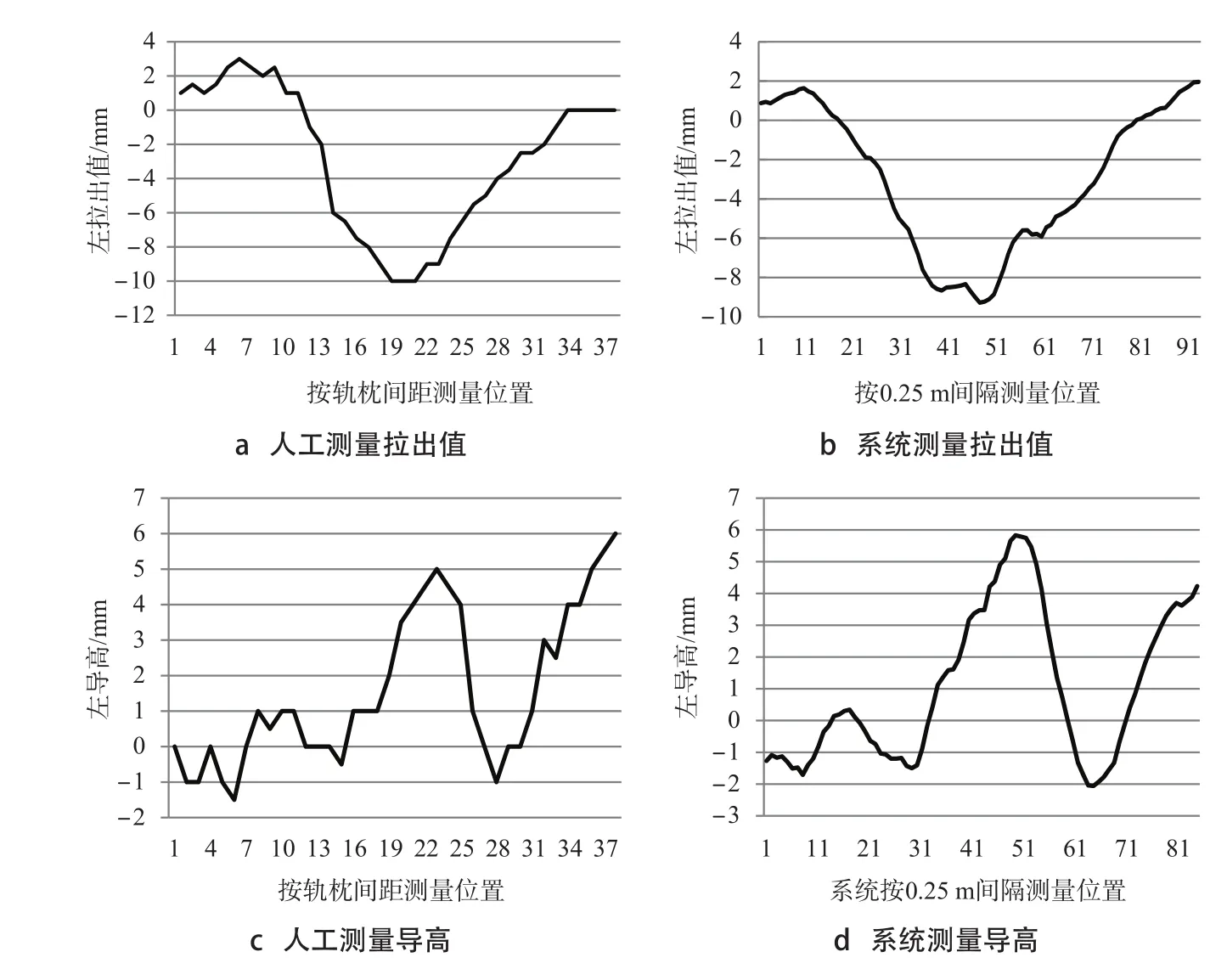
图10 接触轨人工测量与系统测量对比
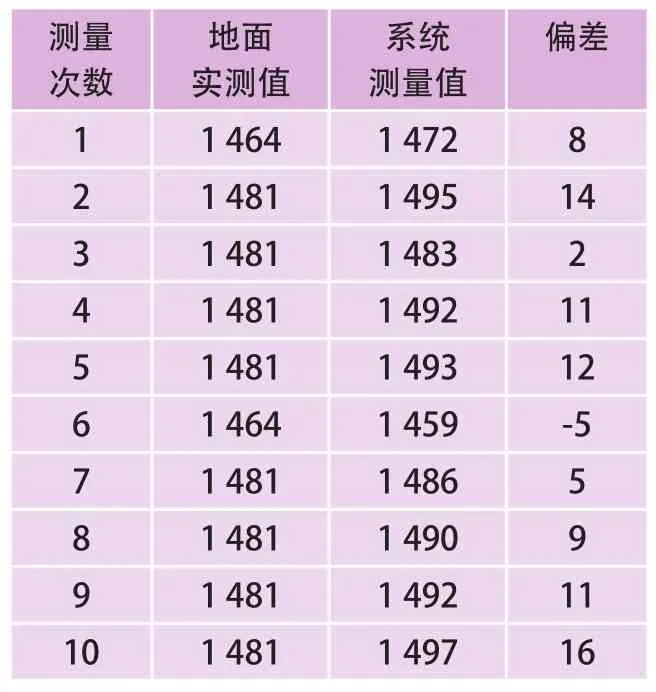
表3 限界检测数据比较 mm
4 结语
轨道交通的快速发展,需要用科技的手段来提升运营的质量和效率,无锡地铁综合检测车经数次动静态调试标定以及现场验收,各检测系统工作状态稳定,检测项目和指标满足检测要求,目前,已正式应用于无锡地铁的定期检测中,为监控轨道、接触轨运行状态及检测沿线建筑限界提供有力的技术支持。
参考文献
[1] 王昊. 高速轨道检测图像处理技术[J]. 铁路技术创新,2012(1).
[2] 王登阳,杨超高速综合检测时空同步技术[J]. 铁路技术创新,2012(1).
[3] GB/T 25021-2010轨道检查车[S]. 2010.
[4] 程志全,张重阳,何允烘.地铁网轨综合检测车接触轨标定工装研制[J]. 中国铁路,2014(10).
[5] 柴东明,魏世斌,刘玲平,等.深圳地铁轨检车检测系统的研制[J]. 中国铁道科学,2005,26 (5).
责任编辑 朱开明
Development of Wuxi Metro Comprehensive Inspection Train
Niu Haiyan
Abstract:The inspection system of the comprehensive inspection train by Wuxi metro using non-contact measurement technologies; including inertial measurement principle, machine vision and laser scanning etc. integrating track geometry and dynamic response, contact rail inspection, tunnel clearance inspection and the wheel/rail monitoring and other functions in a train. It also conducts accurate mileage positioning with application of radio frequency identifi cation (RFID) technology, fast and efficient inspection of track geometry, contact rail, tunnel and the surrounding buildings of urban rail transit. The inspection system of the comprehensive inspection train has passed the static testing and dynamic verifi cation, the testing has met the inspection requirements, and it has formally used in periodical track inspection in Wuxi metro.
Keywords:metro, comprehensive inspection train, development
收稿日期2014-11-19
中图分类号:U216.3