广州地铁速度120 km/h车辆自主牵引系统防滑控制策略优化
2015-03-07高伟,郑玄
高 伟, 郑 玄
(广州市地下铁道总公司 运营事业总部车辆新线部, 广州广东 510310)
广州地铁速度120 km/h车辆自主牵引系统防滑控制策略优化
高 伟, 郑 玄
(广州市地下铁道总公司 运营事业总部车辆新线部, 广州广东 510310)
阐述了地铁车辆轮轨间的黏着特性,介绍了广州地铁3号线120 km/h车辆自主牵引系统的黏着控制策略,重点对列车防滑控制逻辑进行分析,包括滑行检测逻辑和力矩减载恢复逻辑。试验表明,自主牵引系统的防滑控制逻辑能有效检测到滑行现象,及时对力矩进行调整,有效提高了黏着控制性能。
地铁列车; 120 km/h; 自主牵引系统; 防滑控制
广州地铁3号线列车采用的是4动2拖6节编组地铁B型车辆,最高速度120 km/h,其中1列车为国内首次开发的具有自主知识产权的B型地铁120km/h的牵引系统,最初设计的防滑控制逻辑在列车试验过程中多次发生无法准确监控或有效防止列车滑行的现象。为此,经过研究、优化和试验验证,探索出了适应于120 km/h车辆自主牵引系统的防滑控制逻辑。
1 防滑控制逻辑原理
迫使地铁车辆减速的制动力是由车轮和钢轨间的切向相对运动传递的。在一定范围内,随着这种相对运动的速度增大,轮轨间能够有效传递的制动力也增大;但是当相对运动速度超过某一阈值后,能够传递的制动力将不再增大而是迅速减少。黏着特性就是指能够传递的制动力与车轮和车体的切向相对运动速度(下称蠕滑速度)之间的关系[1]。制动时,蠕滑速度vs与车轮速度vwheel和列车速度vvehicle的关系如下[2]:
黏着系数μ定义为列车能够有效发挥的制动力F与列车轴重M之比[3]:
图1给出了不同路况的下的黏着特性曲线。可以发现,虽然不同路况下的曲线互不相同,但在各种路况下都存在黏着系数最大值μmax。记μmax对应的蠕滑速度为vSopt,称(vSopt,μmax)为最佳黏着点,如图1中的A、B点。显然,不同路况下对应的最佳黏着点也不同,并且只有当黏着系数为最大值μmax时,轮轨间能够传递的制动力最大。因此,为了使列车在各种路况下都能够有效发挥制动力,列车必须运行在当前路况下的最佳黏着点[4]。黏着控制的目标就是在机车运行过程中,使实际的黏着系数尽量逼近于当时路况的黏着系数最大值μmax,从而获得最大的平均制动力[5]。
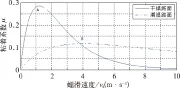
图1 不同路况下的黏着特性曲线
目前普遍采用的黏着控制方法有校正法、蠕滑速度法(可以分为直接法、间接法)、黏着斜率法等[6-7]。随着黏着控制理论和工程化的不断发展,各种新型黏着控制方法被相继提出,黏着控制性能得到不断完善。为了将广州地铁3号线120 km/h地铁车辆自主牵引系统的黏着控制性能提高到一个更高的水平,提出了新的防滑控制逻辑。
2 速度120 km/h列车防滑控制逻辑的分析
2.1 原有防滑控制逻辑
原有防滑控制逻辑采用校正法,通过采集轮对电机速度和列车参考速度,计算电机减速度和减速度微分,同时计算轮对间的速度差和电机与参考速度之差(即蠕滑速度),然后分别利用以上指标进行防滑控制。防滑控制模块包括轮对减速度保护模块、轮对减速度微分保护模块、轮对速度差保护模块、轮对蠕滑速度保护模块,分别介绍如下。
(1)轮对减速度保护模块
减速度保护控制是通过检测轮对减速度a是否超出设定的阈值a0,并在轮对减速度超出设定的阈值a0时,根据减速度的大小降低电制动力矩设定值以抑制或防止滑行现象的发生,如图2所示。

图2 减速度保护功能图
(2)轮对减速度微分保护模块
轮对减速度微分保护的基本原理是通过计算和监测轮对减速度微分保护阈值与减速度微分的差值Δ,按照图3所示的控制算法进行黏着控制,实现最佳的黏着利用控制。
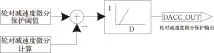
图3 减速度微分保护功能图
(3)蠕滑速度保护模块
蠕滑速度保护的基本原理是通过计算比较拖车速度(网络计算出的列车综合速度)和轮对速度之间的差值,并根据差值按照一定的关系调整电制动力矩设定值,使得地铁车辆在发生滑行时能够从这些状态中迅速退出并重新恢复黏着,如图4所示。

图4 蠕滑速度保护功能图
(4)轮对速度差保护模块
当车辆任意两轮对间的速度差|Δv|大于设定阈值Δvgate时,认为车辆已发生较大滑行,将电制动力矩设定值迅速降低,如图5所示。

图5 轮对速度差保护功能图
(5)黏着力矩输出模块
黏着力矩输出为综合以上各个环节调节后的输出和来自控制系统的力矩设定值产生最终的来自电机逆变器的力矩设定值,如图6所示。

图6 黏着力矩输出计算
2.2 优化后防滑控制逻辑
优化的防滑控制逻辑仍然采用校正法,但力矩调节反应速度和调节幅度均有较大改善,同样通过采集轮对电机速度和列车参考速度,计算电机减速度,同时计算轮对间的速度差和电机与参考速度之差(即蠕滑速度),取消电机减速度微分保护功能,分别利用以上指标进行防滑控制。由于原有的减速度微分保护中的减速度微分是通过减速度再次微分计算得到的,误差会有所增大,容易对防滑判断产生负面影响,且在调试过程中减速度微分保护过于超前保护,因此,优化后的防滑控制逻辑取消了减速度微分保护。防滑控制模块除取消电机减速度微分保护模块外,保留了轮对减速度保护模块、轮对速度差保护模块、轮对蠕滑速度保护模块,并对滑行检测逻辑和力矩减载和恢复策略进行了优化,各个模块的优化分别介绍如下。
(1)轮对减速度保护模块优化
减速度保护控制的原理与原有基本一致,但减速度保护阈值a0由原来的固定不变值优化为根据速度等级动态变化值,即:
a0=f(v)
力矩调整策略由原来的固定斜率减载优化为通过减速度实际值a与减速度保护阈值a0之差Δ作为力矩减载大小的参数,即目前减速度保护模块的力矩减载大小与Δ相关,即:
(2)蠕滑速度保护模块优化
蠕滑速度保护的原理与原有基本一致,但蠕滑速度保护阈值b0由原来的固定不变值优化为根据蠕滑率大小动态变化值,即:
b0=f(vr)
力矩调整策略由原来的固定斜率减载优化为使用蠕滑速度大小作为力矩减载大小的参数,即目前蠕滑速度保护模块的力矩减载大小与vr相关,即:
(3)轮对速度差保护模块优化
轮对速度差保护的原理与原有基本一致,只调小了保护阈值,使得轮对速度差保护更加严格。
轮对速度差保护的力矩调整策略由原来的固定斜率减载优化为使用速度差大小作为力矩减载大小的参数,即目前蠕滑速度保护模块的力矩减载大小与Δv相关,即:
(4)黏着力矩输出模块优化
当前黏着力矩输出模块与原有模块有不同,当前模块是利用采集和计算得到的判据对各个环节单独判断后的调整值进行一定的加权,该加权值综合了各个环节判断时的严重程度,使得力矩减载更加合理,也大大减少了误判滑行的概率。
3 调试与优化效果
3.1 调试过程中解决的问题
(1)解决干轨条件下偶尔出现力矩减载的问题
通过对滑行判断条件的优化,具有一定的干轨条件识别功能,使得判断更准确。
(2)解决湿轨条件下黏着力矩卸载幅度、波动比较大的问题
通过调整黏着力矩的卸载和恢复斜率,并且阈值具有一定的动态变化,使得力矩卸载波动变得平缓。
(3)解决湿轨条件下电制动力切除问题
通过将电制动工况下黏着判断的阈值进行一定的调整,黏着力矩发挥在原有基础上有所提高,并且放宽逻辑切除电制动的条件,使得在湿轨条件下电制动不再被切除。
3.2 优化效果
黏着控制方案在120 km/h地铁车辆进行了试验验证,分别在干燥轨面和洒水轨面上进行了防滑试验,洒水试验时水中含有5%的增滑剂,图7和图8分别是干轨条件和湿轨条件的试验波形,由波形可知,干轨条件下未出现力矩减载,湿轨条件下力矩减载平稳,波动幅度不大,试验过程中车辆运行平稳。
目前,一般通过黏着利用效率来衡量和评估在当前轨面条件下黏着力矩发挥效果,黏着利用效率公式如下:
经验证,干轨条件下黏着利用率达到95%以上,电制动力矩设定值未超出能发挥的最大黏着力矩;湿轨条件下黏着利用率达到85%以上,完全符合试验要求。

图7 120 km/h防滑试验数据波形(干轨)

图8 120 km/h防滑试验数据波形(湿轨)
4 结束语
通过对原有防滑控制逻辑的进一步优化,应用于广州地铁3号线120 km/h地铁车辆自主牵引系统的黏着控制性能有了较大幅度的提升,其在各速度等级下的AW0和AW2湿轨条件下黏着利用率均大于85%,完全满足试验要求。通过优化判断阈值,提高了黏着判断滑行准确率,改善了滑行情况下黏着力发挥能力。后续应用表明,优化后的黏着控制方法具有较强的适应路况变化的能力,黏着力矩变化平稳,有利于减少轮对损耗,提高轨道车辆的性能和舒适度。
[1] 万 广 .机车黏着控制技术现状与发展[J]. 机车电传动. 1996,(22):1-4,7.
[2] 李江红,马 健,彭辉水. 机车黏着控制的基本原理和方法[J].机车电传动.2002,(6):4-8.
[3] 彭辉水,陈华国,曾 云,等. 基于加速度微分黏着控制方法的仿真研究[J].机车电传动.2010,(2):26-27,32.
[4] 李江红,陈华国,胡照文.国产化北京地铁车辆的黏着控制[J].机车电传动.2005,(6):41-42.
[5] 李江红,胡照文. 影响铁路机车运行品质的因素分析[J].机车电传动,2010,(3):53-54,63.
[6] J. Miehael Hasemann. A Fuzzy Controller to Prevent Wheel Slippage in Heavy Duty off Road Vehicles [J]. IPEC-Toykyo.1994.(21).
[7] A.D.Cheok, S.Shiomi. Combined heuristic knowledge and limited measurement based fuzzy logic antiskid control for railway applications [J]. IEEE Transactions on systems,man and cybernetics.2000,(3).
Optimization of Anti-skid Control Strategy for Guangzhou Metro 120 km/h Vehicle Independent Traction System
GAOWei,ZHENGXuan
(New Line of Vehicles Department, Operation Division, Guangzhou metro Corporation, Guangzhou 510310 Guangdong, China)
The paper presents the characteristic of adhesion between wheel and rail of metro vehicle, and introduces the adhesion control strategy of 120 km/h metro vehicle independent traction system on Guangzhou line 3. It specially analyzes the anti-skid control logic, including slide detection logic and torque load reduction recovery logic. Tests results that the slide phenomenon can be detected effectively torque can be adjusted timely by the anti-skid control logic, and the adhesion control performance can be improved effectively.
metro vehicle; 120 kph; independent traction system; anti-skid control
1008-7842 (2015) 03-0127-04
男,工程师(
2015-02-11)
U239.5
A
10.3969/j.issn.1008-7842.2015.03.31