基于谐波消除的矢量控制在地铁牵引逆变器中的应用
2015-03-07杨北辉王辉华吴能峰唐传明
杨北辉, 王辉华, 吴能峰, 唐传明
(深圳市英威腾交通技术有限公司, 广东深圳, 518055)
基于谐波消除的矢量控制在地铁牵引逆变器中的应用
杨北辉, 王辉华, 吴能峰, 唐传明
(深圳市英威腾交通技术有限公司, 广东深圳, 518055)
针对地铁牵引系统的特殊工况,研制了基于谐波消除的矢量控制的地铁牵引系统逆变器。本文介绍了控制系统的基本参数和性能,该系统采用转差矢量控制的控制策略和基于谐波消除的PWM的调制方式。试验表明:该系统启动转矩大,转矩响应迅速,牵引制动平稳可靠,满足地铁牵引系统设计要求。
谐波消除; 地铁牵引系统; 转差矢量控制
随着中国经济的持续发展,城市规模越来越大,城市拥堵问题也日益突出。地铁作为城市快速交通的主要工具,以其高速、安全、便利等优点越来越受到重视。我国通过多年的引进吸收和自主创新,地铁牵引系统已经实现了自主研发和制造。本文将介绍基于谐波消除的矢量控制在自主化电气牵引系统中的应用。
大功率电力牵引通常采用的IGBT器件开关频率在1 kHz以下,通常采用磁场定向矢量控制的转矩控制方案,这对逆变器的矢量控制和PWM调制算法提出了更高要求。首先,列车在宽速度范围内运行时矢量控制的有效性必须得到保证;然后就是紧凑的结构和恶劣的散热条件要求尽量降低IGBT开关频率,需要采用多种不同的调制策略以满足对直流母线电压利用率的要求;还有就是对逆变器谐波要求越来越高。
对转差矢量控制方案进行了理论分析、推导,限于篇幅仅对谐波消除进行了一般性分析,给出了地铁牵引逆变器调制策略。利用大功率IGBT牵引逆变器、组合试验平台以及地铁列车现车试验,开展各种工况下的试验研究,表明该控制系统能够满足地铁牵引系统的技术要求。
1 自主化地铁牵引系统概要
自主化地铁牵引系统主电路采用二电平电压型直-交逆变电路。车辆采用4动2拖的编组模式,每辆动车装有1台VVVF牵引逆变器箱,逆变器采用集中式设计,逆变器装有隔离接地开关、高速断路器、滤波电抗、接触器、功率单元、制动电阻等模块,向2个转向架的4台并联的异步牵引电动机供电(1C4M)。主要技术参数见表1。
VVVF逆变器通过矢量控制的方式调节逆变器输出电压和频率可获得类似于直流电机驱动车辆的运行性能。图1 为VVVF牵引逆变器控制列车的一般特性曲线。曲线分为6种控制模式。

表1 牵引系统技术参数
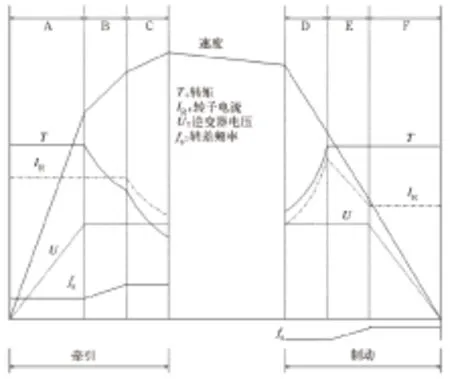
图1 车辆运行特性曲线
1.1 牵引工况
(1)恒转矩区域
逆变器电压U增加时,增加频率f,控制U/f比值和转差频率fs为常数。转子电流IR和转矩T保持恒定,车辆以恒定加速度牵引。
(2)恒功率区域
当电压增加到接近逆变器输出最大值时,电压不能再增加,而仅增加频率将使电机转子电流减小。因此该区域通过增加转差频率,使得转子电流保持恒定。转子电流IR和逆变器电压U恒定,电机转矩与转速成反比,车辆以较低加速度牵引。
(3)电机特性控制
牵引电机恒功率控制受限于转差频率的限制,当转差频率不能再增加时,系统进入电机特性区,转差频率fs保持在最大值,输出电压U保持不变,电机转矩与转速平方成反比。车辆以低加速度牵引。
1.2 制动工况
再生制动过程与此前描述的牵引控制模式相反,转差频率fs控制在负范围(逆变器频率低于电机旋转频率)
(1)电机特性区域
降低逆变器频率,保持转差频率fs恒定。制动转矩T逐步增加,转子电流IR逐步增加,逆变器输出电压U恒定,制动转矩以转速平方成反比,车辆以较低减速度制动。
(2)恒转矩区域(1)
制动转矩增加到特定值后,减小转差频率fs,将转子电流IR逐渐降低以保持制动转矩T恒定,车辆以恒定减速度制动。
(3)恒转矩区域(2)
模式F也是恒定制动转矩模式。逆变器电压U减小时,同时减小频率f,控制U/f比值和转差频率fs为常数。转子电流IR和制动转矩T保持恒定,车辆以恒定减速度制动。
2 基于谐波消除的转差频率矢量控制
2.1 转差频率矢量控制
牵引逆变器中对牵引电机的控制实质是对电机电磁转矩的控制,本系统采用了转差频率矢量控制方法,在有些文献中又被称为间接磁场定向控制或磁场前馈控制,由于其控制简单、转矩稳定可靠,在工业应用中比较流行。
根据电机学原理,为简单起见,这里忽略转子漏感,此时转子磁链和气隙磁链相等。电机稳态下等效电路如图2所示。
图中,u和i为电压和电流;L,R,ω,ψ分别为电感、电阻、角速度和磁链;下标中的s,r,m为定子、转子和磁场量;id和iq分别为励磁电流和转矩电流。
牵引电机的电磁转矩电机可由式(1)求出:
(1)
从式(1)可以得知,电磁转矩Te除与牵引电机自身固有参数K1有关之外,还与转子磁链幅值|ψr|和转矩电流

图2 牵引电机等效电路图
iqs有关。因此,为了得到恒定的电磁转矩Te,必须对|ψr|和转矩电流iqs分别进行控制。
如图3所示,ds—qs为静止坐标系固定在定子上,转子轴dr—qr以角速度ωr旋转,de—qe为旋转坐标系比dr—qr,超前一个转差频率角θsl,转子磁链相对于转子以速度ωsl旋转,转差频率矢量控制通过计算转差频率得到转子磁链。

图3 转差频率矢量控制原理
(2)
(3)
把定子电流励磁分量ids定向到de轴上,定子电流转矩定向到qe轴上,这样就实现了对电机解耦控制。
(4)
(5)
(6)
图3中,上标s、e、r为静止坐标系、旋转坐标系和转子轴,下标sl为转差。
本系统所采用的转差频率矢量控制方法属于间接控制转子磁场的定向矢量控制。转差频率矢量控制原理框图如图4所示。该方法使用了定子电流的反馈控制,在异步和同步调制区通过对转子和定子电阻估算获得高性能。电机运行在高速区时,逆变器工作为谐波消

图4 转差频率矢量控制原理框图
除或方波模式,电压的幅值已不可调整,此时可通过电机弱磁控制来对磁场进行规划,以实现矢量控制。
在转差计算时,假定转子磁通恰好在de轴(转子磁通的q轴分量为零)。根据式(5)可以确定产生所需要转子磁链的励磁电流给定ids*,根据式(6)可以确定电机的期望转差ωsl*。将反馈电流(id,iq)分别与电流给定值(id*,iq*)进行电流闭环,通过PID调节输出变为转矩磁通电压(Uq*、Ud*),通过坐标变换转换成电压相位角(θp)和调制度(M),然后把θp和θe相加得到最终输出电压的相位角θv,继而进行PWM调制输出IGBT门极信号。通过对转矩和磁通电流的解耦控制,控制电机的d和q轴的电流以跟踪给定电流,以维持转子磁场定位,并实现转矩的瞬态控制。
在谐波消除或方波区域内,因为电压矢量幅值不能进行调整,所以采取磁链开环的控制策略。图4的励磁电流PID调节将被取消,根据转矩电流PID调节输出Uq*作为转差的补偿,构成以相位角θp为主体的转矩控制系统,这种区域内运行的矢量控制系统,类似于以往的转差频率控制系统,但是由于进行了解耦控制以及高速的矢量运算,所以快速响应性要比转差频率控制要好。因此,系统可实现转矩控制的高精度和快速响应特性,从而形成全速度域的矢量控制系统。
2.2 PWM调制策略
对于地铁牵引工况,线网电压波动较大,如何充分利用直流电压,以期获得最大输出转矩,特别是牵引电机运行在高速弱磁阶段时,为了获得足够的电压,必须进行过调制。在低速载波比较高时采用空间矢量调制(SVPWM),能明显减少逆变器输出电流的谐波成分。中速段采用同步调制,保持载波信号与调制信号频率比保持不变,一个周期内电压输出的脉冲个数和相位是固定的。高速段采用谐波消除PWM同步调制,在提供输出电压同时可以对低次谐波输出进行抑制,最后过渡到方波。逆变器调制模式如图5所示。
在特定消谐技术中,首先是根据人为设计的逆变器输出波形的特点及拟消除谐波的次数和个数来建立输出波形的数学模型,然后由数学模型求解开关角以得到所希望的输出波形,从而达到使逆变器的输出波形中不含拟消除次数及个数谐波的目的。波形正负两半周期镜像对称,消除了偶次谐波,对于三相对称系统,3的整数倍次谐波因同相而被自动消除。因此只有非3的整数倍的奇次谐波才需要消除。

图5 逆变器调制模式示意图
以下以1/4周期波脉冲个数为3的例子来说明,如图6所示,输出电压1/4周期内,器件通、断各3次(不包括0和π/2),共3个开关时刻(α1,α2,α3)。

图6 特定谐波消去法的输出PWM波形
波形在半周期内前后1/4周期以π/2为轴线对称,消除谐波中余弦项,用傅里叶级数表示为:
(7)
(8)
如图6,能独立控制α1、α2、α3共3个时刻。该波形的an为
(9)
式中n=1,3,5,…
确定a1的值,再令两个不同的an=0,就可建3个方程,求得α1、α2和α3。消去两种特定频率的谐波。
考虑消去5次和7次谐波,得如下联立方程:
(10)
(11)
(12)
给定a1,解方程可得α1、α2、α3。
一般,在输出电压半周期内器件通、断各k次,考虑PWM波1/4周期对称,除用一个控制基波幅值,可消去k-1个频率的特定谐波。
2.3 空转滑行控制技术
为抑制地铁在牵引时空转和制动时滑行,系统引入了空转滑行控制技术。空转滑行控制使用速度和计算加速度检测空转的方式。加速度是以速度的微分值来表示。

图7 空转检测控制流程图
利用反馈回来的电机速度计算出的车轮的实际速度,由实际速度变化推算反馈加速度,再根据给定力矩估算给定加速度。由估算加速度叠加一个允许的加速度误差作为参考加速度限定值,当前速度加上加速度限定值时间片内积分作为速度限定值。为了尽量减少空转或者滑行带来的影响,我们将速度限定值作为变流器输出前馈,这样空转或者滑行程度得到极大抑制。如果发生空转或者滑行,摩擦阻力会减少,计算加速度会大于加速度限定值,速度也会立即达到限定值,当速度达到当前限定值时,变流器输出频率短时内不再上升,反馈转矩电流会减少,少于给定值,如果该状态持续几个周期,就认为发生了空转或者滑行。
空转滑行控制模块接收到空转、滑行信号时首先将给定转矩指令清0,等待一个预置的延时;第1阶段黏着力恢复:根据前面计算的空转滑行度,按斜率恢复转矩力(70%,可设置);延时等待黏着稳定;第2阶段黏着力恢复:按斜率恢复到给定转矩;在黏着力恢复的过程中空转滑行检测模块也会一直激活,如果出现空转滑行状态,立即进入第一步。
3 地面试验
该牵引系统试验首先在牵引组合试验台上进行了地面试验,采用电机对耦拖动,逆变器拖动4台电机进行试验,分别模拟地铁空载、轻载、重载、低恒速工况。
电机试验波形见图8,谐波消除测试结果见图9。
试验结果表明,牵引电机转矩控制稳定;电机的动态响应迅速、稳态性能良好,低次电流谐波含量得到有效控制,特别是5次和7次谐波基本控制在1%以下。

图8 线路模拟牵引、惰行、制动工况

图9 谐波消除模式(67 Hz)谐波测量图
4 现场车辆试验
装载本牵引系统的A型地铁车辆在车辆厂和地铁公司现场进行了AW0、AW2、AW3试验,各项指标均达到设计要求。图10为列车AW3工况下列车典型区间牵引制动特性试验图。
通过轨道洒水的方法进行空转滑行黏着恢复控制试验,列车防空转滑行效果满足列车技术要求。图11为防空转防滑行试验波形图。

图10 AW3牵引制动特性试验

图11 防空转防滑行试验
5 结束语
基于谐波消除的矢量控制系统在地铁A型系统成功应用,为我国地铁装备自主化做出了贡献。通过地面和现场车辆试验,该系统能够很好地满足地铁A型车牵引制动特性要求,特别是其谐波消除控制策略,具有推广价值。
[1] 陈伯时. 电力电子与电力传动自动化[M]. 北京:机械工业出版社,2008.
[2] 李永东.交流电机数字控制系统[M]. 北京:机械工业出版社,2002.
[3] 黄济荣. 电力牵引交流传动与控制[M]. 北京: 机械工业出版社,1998.
[4] Bimal K.Bose(美). 现代电力电子学与交流传动[M]. 北京: 机械工业出版社,2005.
Application of Vector Control Based on Harmonic Elimination in Metro Traction Inverter
YANGBeihui,WANGHuihua,WUNengfeng,TANGChuanming
(Shenzhen INVT Transportation Systems Co., Ltd., Shenzhen 518055 Guangdong, China)
A metro traction inverter system of vector control base on harmonic elimination technology was developed for special conditions of metro traction system. The slip vector control strategy and the PWM modulation method based on the harmonic elimination were used in this system. The paper introduces the basic parameters and the performance of the control system, and carries out some tests. The tests show that the inverter system has many advantages such as large starting torque, fast torque response, stable and reliable traction & brake, which can meet the design requirements of metro traction system.
harmonic elimination; metro traction system; slip vector control
1008-7842 (2015) 03-0100-05
��)男,高级工程师(
2014-12-08)
U239.5
A
10.3969/j.issn.1008-7842.2015.03.25