负荷跟踪发电系统自适应控制方法
2015-03-06马立新
马立新,刘 春
(上海理工大学 光电信息与计算机工程学院,上海 200093)
目前传统的PID 控制[1]已被广泛应用于大部分火力发电厂,但对于主蒸汽温度的扰动因素较多且难以控制的被控制对象,传统的PID 控制要建立精确的数学模型较为困难。因此,打破常规控制策略,以先进的智能控制取代传统火电厂过程控制为首要任务。由上述情况提出了具有参考模型的自适应控制系统[2-4],现今,该智能控制方法在飞机控制、导弹控制等领域被广泛应用,其发展过程在文献[5]中描述。智能控监测系统运行状况,并且与理想的运行状况做比对,根据实际的运行参量做出调制方法可以实时调整,确保系统在当前环境条件中的运行最优或者次最优状态。本文在给出理论描述的同时,通过实时参量数据仿真,验证了文中方法的可行性。
1 蒸汽温度控制系统
如图1 所示,由于主蒸汽过热器运行时间常数较长,过热器入口的蒸汽温度通过过热器预测热交换量,决定过热器出口温度。过热器入口的蒸汽温度通过向入口处蒸汽中混合给水控制,最终使过热器出口的蒸汽温度值控制在规定数值内。蒸汽在高压缸中做功结束后,被送入再热器中进行下一次加热,然后作为再热蒸汽送入中压缸中。整个过程采用的是常规PID控制[6-7]。
在这个运行过程中,仍存在控制过程上的问题,由于在主过热器与再热器中进行的再循环燃烧气体的热量交换,所以调节燃烧气体的再循环量可以满足控制再热蒸汽的温度要求,但这样主蒸汽的温度也会受到影响;其次,如果改变了主过热器入口的蒸汽温度,那么在主过热器里的燃烧气体到蒸汽的热交换率就会相应受到影响,从而影响了燃烧气体的温度以及再热蒸汽。常规的控制方法对多控制量的相互影响处理效果较差,使得控制系统对负荷的跟踪效果较差。
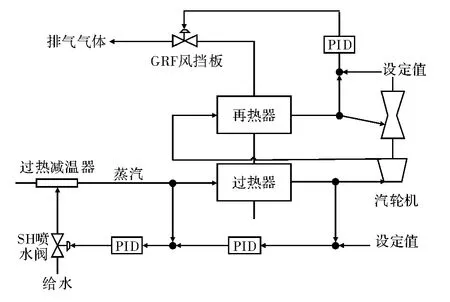
图1 蒸汽温度控制系统
2 模型参考自适应控制系统原理
针对以上问题,提出了模型参考自适应控制系统(Model Reference Adaptive Control System,MRACS)。它使得被控对象紧跟参考模型的动态特性,并可以解决主蒸汽温度多个状态影响下不断变化的问题,使得误差很快的趋近于稳定,控制效果较为理想。为了达到被控对象的控制期望从而建立了MRACS 的参考模型。
如图2 所示,给参考模型和被控对象分别加入相同的目标输入信号,而控制期望是由参考模型的输出结果或运行状态给出。基于以上描述,MRACS 的基本工作原理为:在控制过程运行中,被控对象的动态总是追踪参考模型的动态,并与之相统一。当两者输出状态产生误差时,系统的参数调整机构发挥作用,通过调整自身系数使被控对象的某些参数发生改变,最终尽可能的减小被控对象输出结果与参考模型运行结果的偏差。控制器参量是参量调整机构在得到ym,y 和e等状态变量后,通过一定的算法获得,通过不同算法获得的参量调整机构所需的状态向量会有所不同,在收敛时,对象模型和控制律的对应关系传递函数与参考模型传递函数运行结果一致,从而实现模型跟踪,因此,当对象模型发生变化时,为了达到模型跟踪的目的,控制器参量需要实时更新[8]。
3 参量调整机构的设计
MRACS 的参量调整机构可由不同方法获取,如梯度法、超稳定理论、李雅普诺夫稳定理论等,无论方法如何,其结果通常是等价的。本文采用梯度法[9-11]推算参量调整机构。
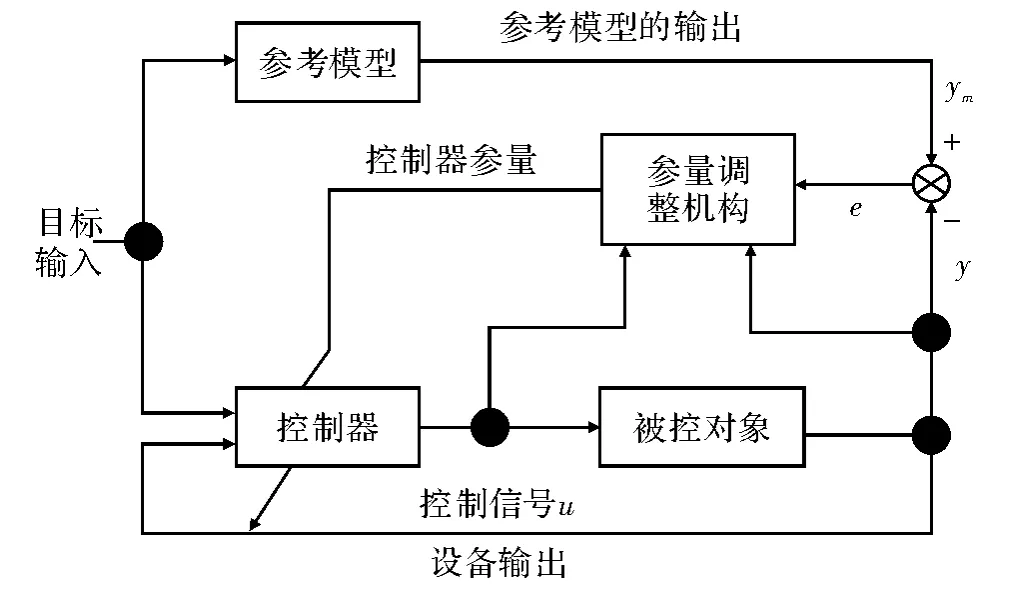
图2 MRACS 结构框图
控制器选择一个可调增益KC,定义被控对象设备的实际输出为y;参考模型在负荷输入作用下得到的输出为ym,被控对象设备实际输出与参考模型输出的广义偏差为e。设参考模型的传递函数

被控对象设备的传递函数

广义误差

设所选性能指标为

下面建立参量调整机构,为使性能指标IPRM取到最小值,对可调增益KC做出调整。假定可调增益KC为不变的可调增益初值KC0及可变的增益部分ΔKC表示,即

用梯度法计算参数调整机构。在以性能指标IPRM所构成的一个超曲面上进行整个搜索过程,如图3 所示。假设起点为点A,其性能指标值为IPRM1,然后沿负梯度方向搜索到性能指标值为IPRM2的1 点,接着搜索到2 点,一直搜索到性能指标达到最小值的n 点,且有IPRM>IPRM1>IPRM2>…>IPRMn。任一直面的梯度为

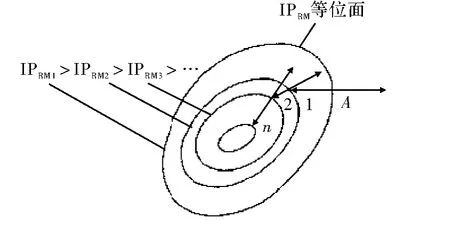
图3 沿负梯度方向的搜索过程
将式(4)带入式(6)中,可得

定义搜索步长为λ,然后按性能指标负梯度方向搜索一个步长,KC的改变量为

将式(7)和式(8)代入式(5),可得

所以当考虑到e=ym-y 时,可得

式(10)即为调整KC的参数调整结构。其中∂y/∂KC称为可调系统输出对可调增益KC的“敏感度函数”。由于系统中高频干扰的存在,微分元件在构成系统时要避免使用,因此在参数调整结构中敏感度函数∂y/∂Kc也要尽量避免使用,为此要作如下变换。对于本文中并联的MRACS 来说,参考模型的传递函数和被控对象设备的传递函数都已经给出。
由式(1)和式(2)得

故有

把结果代入式

4 仿真分析
根据以上理论分析,在Matlab 中建立模型,并通过仿真验证理论的可行性。取某300 MW 锅炉主蒸汽温度控制系统在负荷为30%下测得的过热器动态特性,如表1 所示,采用一阶系统作为被控对象设备的广义传递函数,并选取相同结构的参考模型传递函数,如表2 所示。
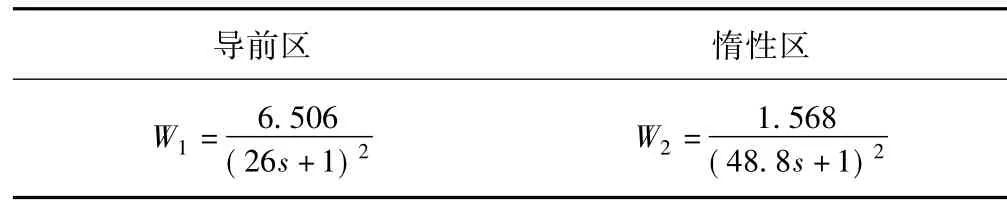
表1 负荷为30%下测得的过热器的动态特性

表2 被控对象设备及参考模型的传递函数
输入对象采用实事负荷数据,负荷变化为210 ~350 MW,将建立的系统模型与传统控制方法效果进行对比。结果如图4 ~图8 曲线所示。

图4 负荷输入图线

图5 MRACS 的误差曲线图线
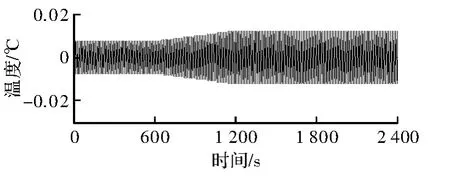
图6 MRACS 的误差放大曲线图线
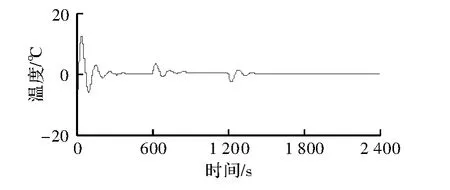
图7 传统PID 的误差曲线图线

图8 MRACS 的控制信号图线
由以上图可以看出:
(1)由图4 与图5 的曲线可以看出MRACS 的误差变化紧跟负荷的变化,将图5 放大得到图6,虽然系统有些波动,但是误差依然在0 附近较为平整的变动,并且恢复稳定时的所需时间较少,控制效果较为满意。
(2)将图6 与图7 作对比可以看出,采用MRACS后所引起的负荷误差远小于传统PID 控制方法造成的误差,前者的误差范围约为0.01 且反应时间短,而后者误差范围稳定后约为5,可见MRACS 对系统的负荷跟踪效果很明显。
(3)此外,图6 与图8 在600 s 与1 200 s 时同时动作,说明采用MRACS 后,由于参量调整机构对误差的调整及控制器的制动,使得误差较快的得到调整并达到了稳定的调整效果,由此说明控制信号能够紧跟变化的误差。
5 结束语
本文以主蒸汽温度控制结构为对象,采用MRACS对被控对象设备进行了研究。在设计出控制系统的参量调整机构后,通过搭建模型,用负荷实时数据作为输入对象,进行了仿真。仿真结果证明了新的控制能够得到更好的动态性能参数和控制效果,验证了所提控制方式的有效性。以此说明MRACS 可以有效的跟踪负荷的变化,可以有效地改善发电设备在温度控制方面由于多干扰引起的负荷波动问题。
[1] 王国玉,韩璞,王东风,等.PFC-PID 串级控制在主汽温控制系统中的应用研究[J].中国电机工程学报,2002,22(12):50-55.
[2] 于希宁.自动控制原理[M].北京:中国电力出版社,2010.
[3] 朱俊,杜斌,金再柯,等.连铸计划优化模型研究[J].控制工程,2006,13(S1):31-33.
[4] 刘本波,邵冰.大厦能源设备控制系统的构成与应用[J].控制工程,2006,13(S1):63-65.
[5] 谢新民,丁峰.自适应控制系统[M].北京:清华大学出版社,2002.
[6] 石慧.模型参考自适应控制的直线永磁电机应用[J].控制工程,2008,15(5):183-185.
[7] 孙德宝,汪秉文.自适应控制原理[M].武汉:华中理工大学出版社,1991.
[8] 鲁民月,顾仲权,杨铁军.简化的结构振动自适应前馈控制方法研究[J].振动与冲击,2005,24(1):89-93.
[9] 松村司郎,平山开一郎.发电设备中的控制技术[M].北京:机械工业出版社,2012.
[10]方强,陈利鹏.定位器模型参考自适应控制系统设计[J].浙江大学学报:工学版,2013,47(12):2235-2242.
[11]刘晓悦,姚乐乐,李庆哲.模型参考自适应控制策略在光伏并网系统中的应用[J].电力电气,2014,33(9):32-37.
