一种显著图分割的遥感油库检测方法
2015-03-06蔡肖芋眭海刚
蔡肖芋,眭海刚
(武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079)
随着遥感卫星(如:IKONOS,Quick Bird 和GeoEye-1)的发展,获取地面影像的空间分辨率也越来越高,这些影像数据应用于物体检测,尤其是人工物体检测和识别[1]。油库一直以来对军事和民用应用具有重要意义[2]。民用方面,在机场遥感影像的毁伤信息提取和分析中,油罐识别与检测的准确度直接影响到毁伤信息提取和分析的效果;在军事上,油库作为原油和成品油等物资的储备设施,在战略上有着重要地位。因此,利用遥感高空间分辨率影像进行地面油库目标的精确定性和定位在军事上有着重要的战略意义。然而,在复杂的遥感影像上,油罐的检测面临巨大的难点。油罐杂乱排列,有不同颜色,易受到复杂背景地物的干扰,边缘易模糊或者表面灰度不均匀;由于光照、成像质量及油罐材料、结构、位置等影响,导致油罐在影像中存在着一定的几何变形。这一系列的复杂情况对油罐的检测与识别带来了很大的难度。
油罐检测传统的方法主要有:模板匹配[3]和Hough变换[3-4]。采用模板匹配的方法计算量大而且模板选择易受尺度,旋转变化等因素影响;采用整体匹配,识别率低且模板难以统一和确定。文献[3]通过利用梯度的方向信息和降低参数空间维数的方法来改进了hough 变换,结合图搜索方法进行油罐检测;文献[4]改进了RHT,改进的Canny 算法以及模板匹配算法进行油罐检测。文献[5]提出了一种自动识别的方法来检测1/4 油罐,利用似圆参数、长宽比和矩形结实度。
通常下,遥感目标物体相对于整个遥感影像来说,是一个较小的目标。为了识别目标在大区域的高分辨率的遥感影像上,文中需首先提取出目标的疑似区域,这样就会提高处理的计算效率。传统的提取感兴趣区域的方法,比如:全局搜索算法[6],基于分割的方法[7]等,通常只是为一种特定的目标检测而用,不能同时检测出多类目标,且全局搜索方法在大尺度的遥感影像上计算消耗特别大,基于分割的方法依赖于分割方法的结果,而现在还没有有效的分割方法。视觉显著检测指出了另一条有效的方向对于疑似区域的提取。
为了识别目标在大区域高分辨率的遥感影像,文中需首先提取出目标的疑似区域,而视觉显著检测对于在大面积遥感影像上疑似区域的提取较为有效。针对上述问题,本文提出了一种基于视觉显著图分割的油罐检测方法,如图1 所示。首先利用视觉显著模型得到油库疑似候选区域,然后用多阀值Otsu 方法分割出目标,最后利用油罐的似圆特征和分布式目标的空间分布规律对油库进行检测识别。
1 改进的视觉显著图
为了检测油罐的区域,对于在随后处理的计算成本来说,选择视觉显著性模型是特别重要的。好的显著性模型应满足以下条件[8]:(1)应具有高运算速度和易于实施,同时均匀高照明整个显著对象时具有良好定义的边界。(2)在未使用任何先验知识和有效地抑制纹理和噪音的前提下,应该产生全分辨率的显著图。HC 模型满足以上,但未能抑制纹理在复杂的遥感图像上,在HC 模型基础上,改进的HC 模型,利用高斯滤波平滑图像,抑制复杂的遥感图像的纹理信息。
基于直方图对比度(HC)的方法定义了一个像素的显著性作为其颜色的对比图像中的所有其他像素。例如,像素Ik的显著值可表示为

式中,D(Ik,Ii)表示像素Ik和像素Ii之间在色彩空间Lab 里的色彩距离;N 是图像上像素的个数。在并未考虑空间关系,用相同颜色的像素具有相同的显著值。因此,像素Ik的显著值,其色值是c1,将其定义为

式中,N 是在图像上不同颜色值的总数量,fj是颜色值cj的出现频率。
为了加快计算,作者首先量化每个颜色通道中的RGB 颜色空间到12 级,并获得123 种不同的颜色。然后其通过消除了由最接近的颜色在颜色直方图取代了并未频繁出现的颜色,从而将颜色数减少至约85。为减少所造成的量化的步骤,颜色的显著值是由一个色彩空间平滑过程。他们用相似的颜色显著值的加权平均,以取代目前的颜色为c 的显著值

为减少计算时间,文中首先将图像从RGB 空间转化到Lab 空间,Lab 颜色空间适应于人的视觉感受,并将其量化为12:12:12,然后将Lab 图像转化到RGB 颜色空间。这个量化操作减少被处理彩色数量而不影响视觉效果。量化之后,构建基于量化的图像上进行小波图像金字塔,即

式中,n 是图像金字塔层数。
然后采用基于直方图对比度的视觉显著(HC)来提取显著区域在每一张图像上以及得到相应的显著图。

式中,Ik是第k 层图像;SMHC是HC 显著图根据方程(3)过程得到的;Hk是第k 层显著图。文中定义新的显著图为

式中,*表示在进行相乘之前H1,…,Hn-1调节尺寸大小与H0一样大,Sm表示最后的显著图。
在此需注意参数n 的选择。在大视场高空间遥感图像中,n 是依赖于双方的图像的空间分辨率和被认可的真实世界对象的大小。换句话说,正被图像中的对象的大小来确定。通常情况下,n=3 适应大多高分辨率的影像,文中选择n=3,以免遗漏较小的目标。
从图1 中可看出,在新的显著图中显著对象获得较高的显著性值,而纹理的区域被有效抑制。

图1 改进的显著图
2 研究方法
首先根据改进的显著模型得到改进显著图,然后用多阀值Otsu 方法分割出目标,最后利用油罐的似圆特征和分布式目标的空间分布规律对油库进行检测识别。如图2 所示。

图2 流程图
2.1 多阀值Ostu 分割
Otsu 法[9]又称大津法或最大类间方差法,始终被认为是阈值自动选择的最优方法,该方法计算简单,在一定条件下不受图像对比度和亮度变化的影响,因而在一些实时图像处理系统中得到了广泛应用。本文采用多阀值Otsu 对改进显著图进行分割,得到二值图像。
2.2 油罐检测
由于油罐大多呈现圆型,所以采用以下几个似圆特征来检测油罐。然而遥感影像的复杂性,检测到的圆不一定全是油罐,所以根据油罐在遥感影像上的分布,大多呈现群聚合阵列,所以,文中采用圆心距离阀值剔除孤立的圆,减少虚警。
(1)圆度

其中,P 是物体的周长;A0是它的面积;R1对于理想的圆最小取值是4,对于其他复杂的形状,其值更大。
(2)长宽比

其中,W 和L 分别是MER 的宽和长,对于标准的正方形和圆,R2=1。
(3)压实率

其中,A0表示相连组成部分区域的面积;AMER是A0对应的MER 面积。对于长方形,其能达到最大值是1,而对于理想的圆约为0.79(π/4),对于其他形状或者曲线,其值更小。
(4)圆心距

其中,i、j 为任两个圆的中心;r 和rj之间的欧几里得距离是其的半径,δ 是常数因子,取值为经验值。
3 实验
文中在Google 上下载大小为3 000×3 000,分辨率约为1 m 的高分遥感影像进行实验。在这个实验中,比较了文中提出的油罐检测方法与文献[3],文献[10]直接分割检测的方法。在此评估的检测结果有误检率和漏检率,其定义如下:

在本文的实验中,设置的参数为R1∈[4π;15],R2∈[0.8,1.2],R3∈[0.6;1]基于的假设是满足这3 个条件的对象被保持为圆形目标。表1 给出了比较结果,由于影像尺寸较大,比较结果显示为图像差别最大部分。

表1 检测结果对比
可从表1 看出,文献[3]和文献[10]的误检率、漏检率相对较高,文献[3]时间消耗较大,本文的方法在误检率、漏检率上均优于两篇文献,在效率上优于文献[3]。图3 显示了油罐的精确检测结果。但部分单独的油罐未能检测,原因是因没有规律,且有些过小。
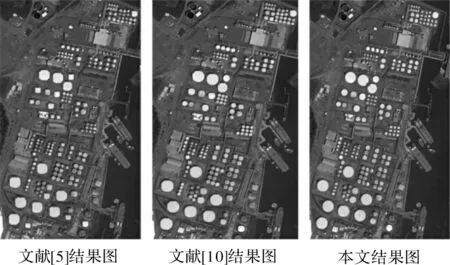
图3 实验对比图
4 结束语
提出了一种基于显著图的检测方法,从高空间分辨率遥感影像检测圆形阵列油罐。首先,采用改进的多尺度全局直方图对比度高效率的显著性检测模型,并通过其来检测显著对象,生成的显著图;然后,经分割并利用形状特征来检测单个圆形物体。最后,根据其空间关系识别该阵列的目标区域。实验结果表明,所提出改进的多尺度直方图基于对比度的显著性模型可有效地输出显著均匀的高亮度候选区域对应有明确的界限,有效地抑制了纹理。另外,将形状特征为基础的方法可更快速地检测圆,但有些不显著的油罐,仍无法被检测到,这是下一步需进行研究的。
[1] Chalmond B,Francesconi B,Herbin S,et al.Using hidden scale for salient object detection[J].IEEE Transactions on Image Process,2006,15(9):2644-2656.
[2] Xu Huaping,Chen Wei.Oil tank detection in synthetic aperture radar images based on quasi-circular shadow and highlighting arcs[J].Journal of Applied Remote Sensing,2013(3):1791-1796.
[3] 韩现伟,付宜利,李刚.基于改进Hough 变换和图搜索的油库目标识别[J].电子与信息学报,2011,33(1):66-72.
[4] 张维胜,王超,张红,等.基于遥感影像的油罐自动检测算法[J].宇航学报,2006(6):1298-1301.
[5] Chen A,Li J.Automatic recognition method for quasi-circular oil depots in satellite remote sensing images[J].Opto Electronic,2006,33(9):96-100.
[6] Viola P,Jones M.Rapid object detection using a boosted cascade of simple features.in proc[C].NJ,USA:IEEE Conference on Computer Vision and Pattern Recognition,2001 IEEE,Piscataway,2001(1):511-518,
[7] Yao J,Zhang Z F.Object detection in aerial imagery based on enhanced semi-supervised learning[C].NJ,USA:IEEE,Piscataway(2005),in Proceedings of IEEE International Conference on Computer,2005,2:1012-1017.
[8] Achanta R,Hemaml S,Estrada F,et al.Frequency-tuned salient region detection[C].NJ,USA:Proceedings of IEEE Conference on Computer Vision and Pattern Recognition,2009:1597-1604.
[9] Otsu N.A threshold selection method from gray-level histograms[J].IEEE Transactions on Systems,Man and Cybernetics,1979(1):62-66.
[10]王岳环,宋云峰,陈君灵.高分辨率遥感图像中油库的检测识别[J].华中科技大学学报:自然科学版,2011,39(S2):110-112.
