一种匝道车辆汇入主干道安全性提示系统
2015-03-05杨鹏飞广东省道路运输管理局广东广州510000
杨鹏飞(广东省道路运输管理局,广东 广州 510000)
一种匝道车辆汇入主干道安全性提示系统
杨鹏飞
(广东省道路运输管理局,广东 广州 510000)
摘 要:针对车辆经匝道汇入主干道时容易与后方车辆发生碰撞事故,提出了一种匝道车辆汇入主干道安全性提示系统。该系统采用安装在匝道口末端的毫米波雷达探测本车与周围车辆之间的位置速度关系,用不同TTC值确定车辆汇入主干道的安全性等级。该系统可有效避免车辆进入主干道时发生交通事故。
关键词:匝道;毫米波雷达;TTC值;提示系统
10.16638/j.cnki.1671-7988.2015.10.022
CLC NO.: U472.6 Document Code: B Article ID: 1671-7988(2015)10-57-03
引言
匝道是车辆从低速区进入高速区的过渡路段,车辆经匝道进入主干道时,驾驶员都需要从后视镜或者车窗玻璃中获取本车后方的交通信息,并做出安全性判断,避免在汇入主干道时和后车发生碰撞,造成追尾等交通事故。我国现有的高速公路匝道在避免此类交通事故发生的设计上,主要考虑匝道的设计长度和驾驶员对后方车辆的可视性等方面。但是由于现阶段我国驾驶员驾驶素质不一,一方面在经匝道汇入主干道时,很少注意后方车辆,且在匝道上加速时间过短,在没有加速到安全车速时就汇入主干道,造成潜在的事故风险;另一方面,匝道口的智能交通基础设施不完善,很多驾驶员缺乏对此类情况安全性的主观判断,或者判断误差较大,而现有路段没有考虑对匝道上车辆汇入主干道安全与否进行提示。这给驾驶员安全出行带来了极大的不便。
1、系统硬件设计
1.1 系统框架搭建
本系统的基本原理是使用一个毫米波雷达来采集从匝道口进入加速段车辆的车速和此车距雷达的距离,同时采集主干道上靠近加速路最近车道上车辆的车速和此车距离雷达的距离,根据几何关系换算得到两车之间的距离和各自的速度,然后系统对当前时刻处于加速段的车辆进入主干道安全性进行评价,当处于加速段的车辆进入主干道时后车和此车之间的跟车时距较小时,系统认为此时进入主干段不安全,否则安全。对评估的结果用室外LED显示屏实时显示,以保证驾驶员在进入主干道时的安全性。系统的框架如图1所示。
1.2 中央处理器设计
本系统中中央处理器采用飞思卡尔MC9S12X系列单片机,具体型号为XET256。中央处理器实时采集I/O口的信号,毫米波雷达将采集到的本车和周围车辆数据传输至处理器,处理器雷达数据可计算出两车之间的TTC值,并根据不同的TTC值,利用不同的信号装置组合进行提示。并将提示显示在LED显示屏上。其中处理器XET256电路图如图2所示,各引脚分别连接雷达传感器、和提示装置。
1.3 系统数据采集
数据采集过程为毫米波雷达采集处于加速段车辆的速度、车辆和毫米波雷达的距离,以及和加速段最近车道上车辆的速度和距毫米波雷达的距离。本实施例采用德尔福ESR毫米波雷达,其有效探测范围可达175米,扫射角度±15° 到±45°,完全能满足实际需要。采集到的数据以CAN总线数据方式输出,采集到的车辆速度、距离和相对角度数据直接传输至处理单元。
1.4 系统数据处理
数据处理就是根据采集到的原始数据和几何关系,换算出加速车道上车辆和与加速车道最近车道上车辆之间的相对运动关系。由于雷达采集到的原始数据包括毫米波雷达和匝道上车辆之间的距离L1和角度α1以及雷达与匝道最近车道上车辆的距离L2和角度α2,两个角度之差即为两车与雷达构成三角形中以雷达为顶点的角度,用数学上的余弦定理,在已知两边及夹角的情况下可计算出第三边长度,即两车之间的距离。同时,两车之间的相对速度可由两车分别于雷达之间的相对速度V1和V2与角度α1和α2来确定。具体做法是以道路纵向为竖轴以垂直于竖轴方向为横轴,分别将V1和V2分解,得到V1x和V1y以及V2x和V2y,再分别将两横轴和两竖轴方向上的速度分量相减,得到V1x-V2x和V1y-V2y,最后将两个相减结果合成得到两车之间的相对速度。
1.5 安全性评估
加速车道车辆汇入主干道的过程类似于换道过程,因此 其安全性评估借鉴当前车载主动安全设备换道预警系统中广 泛采用的TTC(time-to-collision),将其作为本系统安全性评 估的重要指标。TTC的定义是本车和本车后方目标车道上车 辆之间的距离与两车之间的相对速度的比值,在以往的研究 中,换道安全与否的阈值一般采用TTC值来衡量,且根据大 量的实车实验可知,当两车之间的TTC值小于3.3时,此时 前车换道将会发生交通事故,而当TTC值大于5.5时,此时 前车换道一般不会发生交通事故,而TTC 值位于两者之间 时,有可能会发生交通事故,此时需要对驾驶员提供警告。 由于TTC值对换道安全性提示存在一个漏洞,即当前车与目 标车道后方车辆的相对速度较小,而两车之间的相对距离也 较小时,计算出的TTC值反而会很大,例如,高速公路上前 车以85㎞/h的车速行驶,而距前车纵向距离为3m的目标车 道后方有一车辆以86km/h 速度行驶,此时TTC 值为10.8. 这是进行换道很容易发生碰撞等危险情况,需要对驾驶员进 行安全性提示。
2、系统软件设计
系统软件设计主要完成匝道车辆汇入主干道部分的安全性评估,以及根据评估结果进行相应的提示装置。本系统采用的换道安全性评价标准参照现有乘用车换道预警系统中广泛采用的TTC值。TTC(time to collision)=gap/relative speed,其中gap为本车与目标车辆的相对距离,relative speed为本车与目标车辆相对速度。TTC值反映了本车与目标车辆发生危险碰撞潜在可能性大小,同时反映了交通冲突的剧烈程度。当本车与目标车辆的相对速度越小时,或者速度非常接近时,表明如果两车均按照当前运动趋势行驶,则发生碰撞的可能性几乎为0,也就是说两车基本不可能发生碰撞。
具体安全性等级和对应的TTC值之间的关系图如表1所示。
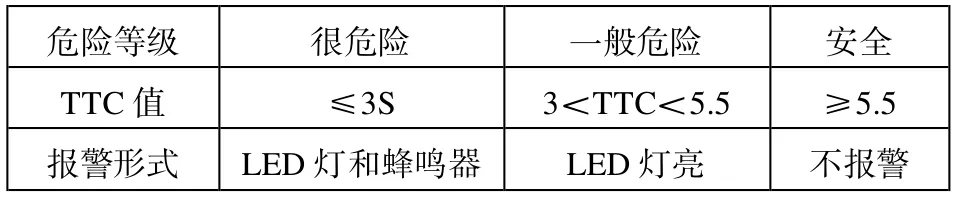
表1 TTC值和相应报警形式之间的关系
根据表1对应的安全等级、TTC值以及对应的报警形式,系统根据传感器采集到的数据和TTC的计算公式,实时计算出TTC值,并对计算得到的TTC值和安全等级进行比较。
3、系统修正
因此本系统在上述TTC值基础上,加入速度因素,重新搭建安全性评价规则。
新的安全性评价规则根据大量的实车实验数据统计分析得到。分别将自车速度分成40~60km/h、60~80 km/h、80~100 km/h、>100 km/h四个等级,得到的安全性提示阈值如下表2所示。

表2 四个安全等级
当系统处理出的结果,即TTC值小于3s时,系统安全性评价是安全的,此时车辆从加速车道汇入主干道时安全的,若系统输出TTC值是大于3s的,则系统认为此时从加速车道汇入主干道不安全,在液晶板上会出现不安全子样,提示驾驶员此时不要进行汇入主干道操作。
4、结论
本文中的匝道车辆进入主干道安全性提示装置主要采用毫米波雷达、LED显示屏和ARM9处理器,能够对经匝道进入加速段的车辆和离加速段最近车道上车辆的速度和距离进行探测,并依据一定的计算原则,对处于加速段的车辆进入主干道安全性进行评价,对评价的结果在LED显示屏上实时显示。
参考文献
[1] 王华,张小宁.走廊通道高架道路匝道设计模型[J].交通运输系统工程与信息,2012,12(05):163-173.
[2] 嵌入式技术在汽车电子领域的广泛应用[DB/OL]. http://wenku. baidu. com/link?url.
[3] 任德锟.基于毫米波雷达的车间位置关系的识别方法[D].西安:长安大学硕士论文, 2012.
[5] MC9S12XET256开发平台实验指导手册.
A safety warning system for vehicle from ramp to the main road
Yang Pengfei
( Guangdong Province Road Transport Authority, Guangdong Guangzhou 510000 )
Abstract:For vehicles entering the main road to enter the main road with the rear vehicle collision accident, this paper proposed a kind of safety tips for the main road to the main road. The system uses a millimeter wave radar to detect the position velocity relationship between the vehicle and the vehicle, and to determine the safety level of the vehicle into the main road with different TTC values. The system can effectively avoid the traffic accident when the vehicle enters the main road.
Keywords:ramp; millimeter-wave radar; TTC values; tip system
作者简介:杨鹏飞,工学博士,就职于广东省交通厅。
中图分类号:U472.6
文献标识码:B
文章编号:1671-7988(2015)10-57-03
