雷达型导弹抗拖曳式诱饵干扰半实物仿真试验技术
2015-03-03张兴利梁艳青
张兴利, 梁艳青, 王 建
(1.中国空空导弹研究院, 河南 洛阳 471009; 2.航空制导武器航空科技重点实验室, 河南 洛阳 471009;
3.中国人民解放军95899部队, 北京 100076)
雷达型导弹抗拖曳式诱饵干扰半实物仿真试验技术
张兴利1,2, 梁艳青1,2, 王建3
(1.中国空空导弹研究院, 河南 洛阳471009; 2.航空制导武器航空科技重点实验室, 河南 洛阳471009;
3.中国人民解放军95899部队, 北京100076)
摘要:为了开展导弹抗拖曳式诱饵干扰算法的调试和验证工作, 必须在半实物仿真系统中实现各种干扰样式的模拟。 本文介绍了一种雷达型导弹抗拖曳式诱饵干扰的半实物仿真技术, 利用仿真计算机完成目标和拖曳诱饵的运动模型计算, 利用阵列式目标模拟器等设备完成了目标和拖曳诱饵的模拟。 实现了拖曳式诱饵干扰在实验室的复现。
关键词:拖曳式诱饵干扰; 半实物仿真; 抗干扰
0引言
拖曳式诱饵干扰是一种新型的对抗雷达跟踪的干扰手段, 主要是在角度上对雷达产生干扰, 通过对目标回波信号接收、存储和调制也能够在时域和频域上对雷达产生干扰, 是一种对抗雷达跟踪和雷达型导弹攻击的有效手段。
半实物仿真作为雷达型导弹制导系统抗干扰性能验证的主要手段, 在实验室实现拖曳式诱饵干扰的模拟, 为导弹抗拖曳式干扰提供逼真的试验环境, 从而为导弹抗干扰算法和抗干扰能力评估提供验证手段, 实用意义重大。
1拖曳式诱饵干扰概况
在现代电子对抗中, 拖曳式雷达有源诱饵(Towed Radar Active Decoy, TRAD)作为一种新型的自卫式干扰方式, 主要用于保护载机平台。 通常由载机通过拖曳线将诱饵拖曳着一起飞行, 诱饵能够准确地模拟载机的飞行特性和雷达反射特性, 使雷达跟踪系统无法区分载机和诱饵, 形成对雷达导引头的有效干扰, 提高载机在作战时的存活率。
拖曳式雷达有源诱饵是指随飞机牵引一个一起运动的有源雷达假目标, 距载机100~200 m。 如果诱饵的干扰功率大于雷达收到的载机回波功率, 那么雷达或导弹就会自动跟踪诱饵而放弃载机目标或跟踪诱饵和载机的“能量中心”, 在这样的条件下, 导弹或者击中诱饵, 或者从诱饵与载机之间穿过, 从而提高载机在作战中的生存概率。
拖曳式诱饵干扰在机上设备的支持下, 转发增强导弹的探测信号, 由于该信号和敌方雷达寻的信号相似, 且比目标机回波信号强, 因此拖曳式诱饵可以将导弹引离飞机, 从而达到保护飞机的目的。 拖曳式诱饵干扰工作时的效果图如图1所示。 美国AN/ALE-55拖曳式诱饵外形图如图2所示。

图1 拖曳式诱饵干扰工作效果图

图2 AN/ALE-55拖曳式诱饵外形图
2拖曳式诱饵干扰的半实物仿真实现
半实物仿真是指在仿真系统中加入导弹的部分实物, 使得仿真结果更加逼近实际。 半实物仿真在导弹算法验证、软件调试、性能评估、靶试前结果预测和靶试后结果复现等方面发挥着不可或缺的重要作用。 充分利用半实物仿真开展导弹性能试验, 可有效降低导弹研制风险, 提高研制水平, 节省研制经费, 缩短研制周期。
进行拖曳诱饵干扰仿真需考虑以下几方面内容: 一是拖曳干扰的运动特征模拟, 首先要建立拖曳干扰与目标机之间的相对运动关系模型, 并将其嵌入仿真模型中目标运动学模块中; 二是光缆长度的影响, 根据电信号在光缆介质中的传输速度计算其传输延迟, 并根据该延迟推算在实际空间中因信号传播延迟导致的诱饵在空间虚拟位置与导弹的相对距离, 通过目标通道实现此距离的精确控制复现光缆长度的影响; 三是拖曳诱饵的种类, 目前主要分转发式和欺骗式两类, 可分别根据其释放干扰信号特征对目标多普勒进行调制。
2.1 半实物仿真系统组成
雷达型导弹半实物仿真系统主要由以下几部分组成:
(1) 仿真总控制台
仿真总控制台主要用于仿真系统工作状态的管理和仿真试验的时序检测及控制。
(2) 三轴飞行转台
三轴飞行转台接收仿真计算机发送的导弹偏航、俯仰和横滚通道的信息, 复现导弹的空间姿态运动。
(3) 仿真计算机
仿真计算机负责相关模型和方程(如载机运动学模型、弹目相对运动学方程、弹体运动学和动力学方程等)的计算任务, 形成设备驱动指令。
(4) 目标回波信号源
目标回波信号源模拟目标回波特征信号, 可仿真目标的多普勒频移、 目标回波功率随距离衰减的规律、 目标回波信号的距离延迟等特性。
(5) 阵列式目标模拟器
阵列式目标模拟器由目标天线阵、射频信号幅相控制组件、射频开关阵及射频连接电缆组成。 它接收仿真计算机发送的目标方位和高低信息, 复现导弹-目标视线的变化。
2.2 拖曳式诱饵的仿真模型计算
拖曳模型中, 拖曳位置根据转角α计算得出。 拖曳和导弹的空间相对距离根据拖曳和导弹的位置以及拖曳电缆物理长度计算得出。 另外, 根据拖曳和导弹的位置以及拖曳电缆等效电长度计算得出拖曳和导弹的等效电距离, 发送给目标信号源。
半实物仿真模型中认为, 在惯性系XOZ平面内, 拖曳干扰位于目标速度方向的延长线上, 如图3所示。
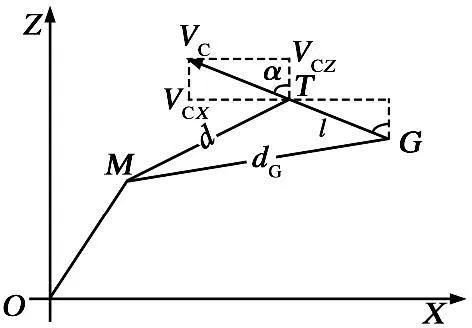
图3 惯性系XOZ平面内拖曳干扰示意图
则拖曳干扰位置相对于目标位置的转角α为

(1)
式中:VCX为惯性系目标速度矢量在X轴的分量; VCZ为惯性系目标速度矢量在Z轴的分量。
目标位置为

(2)
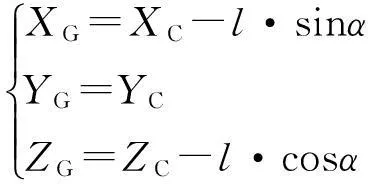
拖曳干扰位置为

(3)
且
(4)
式中:l为拖曳光缆的物理长度。
拖曳干扰相对于导弹的空间距离计算如下:

(5)
式中: RM为惯性系导弹位置矢量。
发送给目标信号源的拖曳干扰等效电距离为

(6)
2.3 目标回波和干扰信号的实现
为了更加逼真模拟外场干扰, 将真实干扰设备或专用模拟设备加入到整个仿真系统中, 这样做的优点是使干扰信号的时域和频域特性与外场情况下完全相同, 能够更加真实地考核导弹抗干扰能力。
为了在半实物仿真系统中同时复现目标回波和干扰信号, 把目标回波信号源和阵列式目标模拟器均分为两个通道, 分别模拟目标和拖曳式诱饵干扰。
其中, 目标回波信号源通道一用以模拟目标回波, 包括目标回波信号的多普勒频率变化、延迟、功率变化等, 此信号输出至阵列式目标模拟器通道一, 经阵列式目标模拟器天线辐射出去, 完成目标回波信号的模拟。 目标回波信号源通道二的输出信号特征为仿真机计算出的诱饵的多普勒频率和延迟, 因为目标和诱饵相隔150m左右, 因此诱饵相对速度和延迟与目标不同。 目标回波信号源通道二根据仿真机给出的导弹和诱饵相对速度和相对距离信息计算并叠加多普勒频率和延迟后输出给干扰设备, 由干扰设备侦收后, 释放出干扰信号, 此信号按照弹目相对距离进行功率调节后, 输出至阵列式目标模拟器的通道二, 经阵列式目标模拟器天线辐射出去, 完成拖曳式诱饵干扰信号的模拟。 半实物仿真连接框图如图4所示。
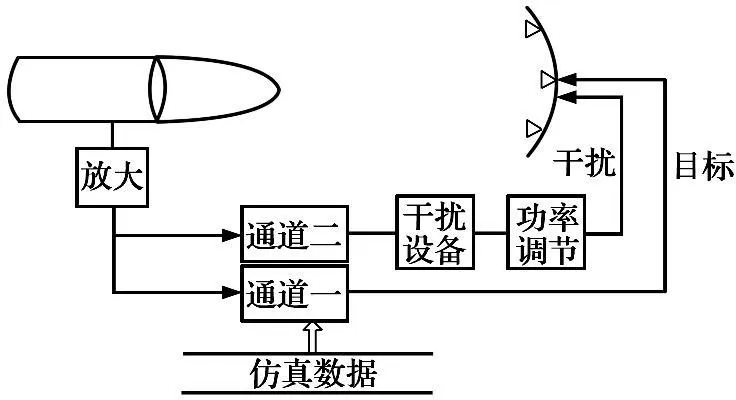
图4 仿真系统连接框图
2.4 实施效果
目标与拖曳式诱饵的视线角轨迹图如图5所示。 从图中可以看出目标与拖曳式诱饵的视线角轨迹在起始段相距很近, 表明在弹目距离较远时, 两者视线角相差很小。 随着弹目距离接近, 两者视线角逐渐拉大, 直至到末端导弹命中目标。 所以目标轨迹曲线位置在导弹视场中间, 而拖曳式诱饵曲线则偏离导弹视场。 两者在末端能够完全从导引头视线中分开。 通过以上方案, 不但能够完成目标和拖曳式诱饵与导弹在空间相对位置(视线角度)的模拟, 更可以真实复现拖曳式诱饵干扰的时域和频域干扰信号特性, 实现了拖曳式诱饵干扰在实验室的逼真复现。
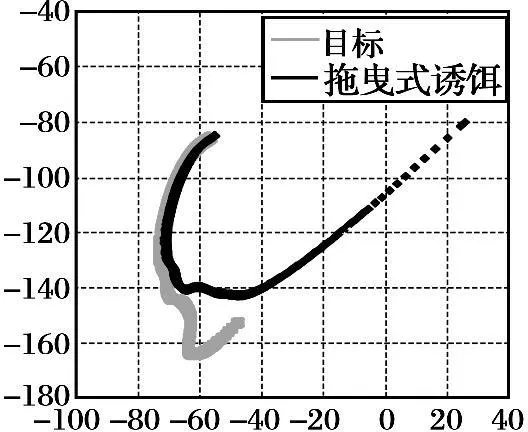
图5 目标与拖曳式诱饵的视线角轨迹图
3结论
通过设计, 由仿真机实现目标和拖曳式诱饵的参数计算, 由目标回波信号源和阵列式目标模拟器与干扰设备配合, 完成目标和拖曳式诱饵干扰的空间相对位置(视线角度)以及拖曳式诱饵干扰的时域和频域干扰信号的模拟, 使拖曳式诱饵干扰在实验室逼真复现, 为导弹抗拖曳式诱饵干扰方案设计和算法验证提供了良好的试验环境。
参考文献:
[1] 林鹏, 刘亚枫, 马东立, 等. 航空拖曳诱饵的释放过程研究[J].飞机设计, 2015(1): 1-5.
[2] 陶利波, 宗小平, 胡海燕, 等. 拖曳式有源雷达诱饵的分辨与横向定标[J].电子信息对抗技术, 2015, 30(2): 45-49.
[3] 王万通, 庞国荣. 拖曳式有源雷达诱饵[J].电子对抗技术, 1998, 13(3): 21-26.
[4] 芦艳龙, 童中翔, 于锦禄, 等. 拖曳式诱饵运动特性建模与仿真计算[J]. 飞行力学, 2010(5): 24-26.
HWIL Simulation Technology of Anti-Towed Decoy
Interference for Radar Missile
Zhang Xingli1,2, Liang Yanqing1,2, Wang Jian3
(1.China Airborne Missile Academy, Luoyang 471009, China;2.Aviation Key Laboratory of Science and Technology on
Airborne Guided Weapons, Luoyang 471009, China; 3.Unit 95899 of PLA ,Beijing 100076, China)
Abstract:In order to carry out the debugging and verification of missile anti-towed decoy interference algorithm, it must be implemented to simulate various interference patterns in the hardware-in-the-loop simulation system. In this paper, a kind of hardware-in-the-loop simulation technology of anti-towed decoy interference for radar missile is introduced, and the simulation computer is used to complete target and towed decoy movement model calculation, and the target array simulator and other equipment are used to complete the simulation of target and towed decoy. Towed decoy interference in laboratory reproducibility is realized.
Key words:towed decoy interference; hardware-in-the-loop(HWIL) simulation; ECCM
作者简介:张兴利(1979-), 男, 河北石家庄人, 高级工程师, 研究方向为系统仿真。
收稿日期:2015-07-31
中图分类号:TJ765.4+3
文献标识码:A
文章编号:1673-5048(2015)06-0055-03