基于RFID技术的行李管理应用研究*
2015-03-02王中友吴哲夫
徐 捷 ,王中友 ,吴哲夫
(1.浙江商业职业技术学院,实训处,浙江杭州310053;2.浙江省通信产业服务有限公司,浙江杭州310050;3.浙江工业大学信息工程学院,浙江杭州310023)
0 引 言
在铁路行李托运过程中,由于托运物品数量多和工作人员有限,难免会发生行李物品错拿或丢失情况,如何降低行李失窃和误领风险是具有实际意义的研究课题。为了在从客运站托运处到列车车厢的搬运过程中方便管理每一件托运物品,需要在客运站内建立相应定位系统动态获取托运物品的位置信息,并通过网络传输至管理中心实现物品监控。目前,用于室内定位和物品定位的技术主要有红外线定位、Wi-Fi 定位[1-2]、Zigbee 定位[3-4]和RFID 定位[5-7]技术等。其中关于Zigbee 定位的文献采用了基于Zigbee 网络的车站行李定位技术,由于必须将Zigbee 接收节点固定于行李上才能实现基于RSSI 值定位,该方案的实际应用成本较高。
本研究所采用的基于RFID 定位方案具有非视距传播范围大、读写速度快、安全性高等优点,并且由于RFID 标签价格便宜,系统性价比较高,相比其他技术更适合应用于客运站。
1 基于RFID 的LANDMARC 定位技术
射频识别RFID 是一种利用射频信号的非接触式自动识别技术,可同时自动识别多个物体,并且系统结构简单,具有广泛的应用。
LANDMARC 系统[8-9]是一种改进的RFID 定位技术,通过引入位置固定的参考标签来辅助定位,从而增加室内系统定位精确性而不增加阅读器数量。定位环境由辅助定位的传感网络和移动设备组成,其中包括4 个RF 阅读器、若干个参考标签和一个待定位标签。
系统中当某个待定位标签与参考标签的空间距离相近时,它们对于同一个RFID 阅读器的信号强度值也应该是相近的。LANDMARC 的具体求解过程如下:
假设有一个n 个阅读器,m 个参考标签以及u 个跟踪标签组成的定位系统,那么跟踪标签p 和参考标签q 的欧几里得距离(D)计算公式为:



其中:参数wi由下式给出:

2 改进的LANDMARC 系统
2.1 改进的LANDMARC 系统算法
改进的LANDMARC 算法将区域分为若干个小的定位子区域,算法布局图如图1 所示。每个子区域由1 个主参考标签和8 个相邻的次参考标签组成。主参考标签属于第一层参考标签,间距在2 m 左右;而次参考标签属于第二层参考标签,间距在1 m 左右,由此可将整个定位区域分为三层定位结构。当算法应用于列车客运站行李托运系统时,实际分层结构可以根据行李数量作具体调整。在标签数量较大时,可以通过增加分层结构来减少数据负载,从而提高定位效率。
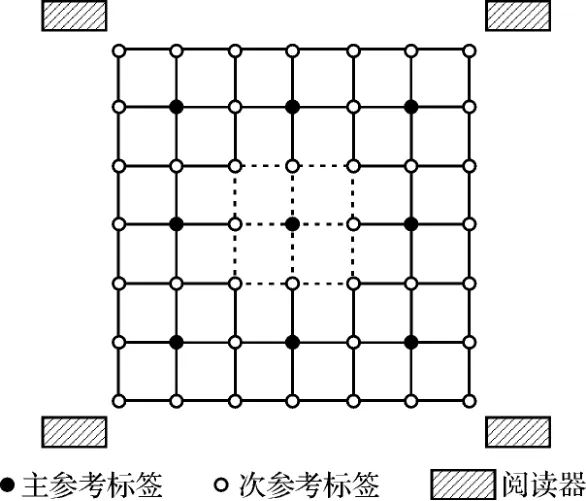
图1 改进LANDMARC 算法布局
具体定位过程可以分为4 个步骤:
(1)确定跟踪标签所在的定位子区域。定位子区域和主参考标签一一对应,只要找出最近的主参考标签,就能确定其所在的子定位区域。假设有n 个RF读取器,p 个主参考标签,u 个跟踪标签。本研究利用式(1,2)计算跟踪标签和主参考标签之间的欧氏距离,得到距离矢量,对距离矢量中各分量排序,选出最小的欧氏距离,对应的主参考标签所在区域即为所求的定位子区域。
(2)每一个定位子区域可以进一步分成4 个定位区域。假设在(1)中确定的主参考标签为PTk,选取PTk周围相邻的8 个次参考标签,计算8 个次参考标签和跟踪标签之间的欧氏距离,选出距离跟踪标签最近的次参考标签ST1。接下来,本研究在剩余的7 个次参考标签中选出与跟踪标签次近的次参考标签,同时这个标签必须是ST1的两个相邻标签之一。这样确定了1 个主参考标签和2 个相邻的次参考标签,也就确定了跟踪标签所在的矩形区域。由上述定位步骤可知,这个矩形区域由1 个主参考标签PTk和3 个相邻的次参考标签(ST1ST2ST3)组成。
(3)与LANDMARC 系统相同,改进算法采用k-最近邻算法和加权算法计算跟踪标签的位置。这里式(3)中k=4,得:

改进算法把参考标签分为主参考标签和次参考标签这两层,逐层搜索跟踪标签的最近邻居来实现快速定位。当参考标签数量很多时,可以将参考标签分为3 层或者更多层,最终将跟踪标签定位在由4 个参考标签组成的矩形区域内。
(4)为进一步提高定位精度,该算法引入修正误差向量的概念。通常情况下,跟踪标签和最近邻居距离不超过1 m,因此可以近似认为两者定位误差向量相同,可由此修正式(5)计算得到的跟踪标签坐标。
为了计算修正误差,首先需要确定距离跟踪标签最近的参考标签,即关键参考标签(key reference tag,KT)。本研究比较主参考标签PTk和3 个相邻的次参考标签(ST1ST2ST3)到跟踪标签的欧式距离,选出关键参考标签。通过利用式(2~4)计算得到KT 的计算坐标(p',q'),已知KT 的真实坐标为(p,q),因此可以得到KT 的定位误差向量:。假设跟踪标签真实坐标为(x,y),由式(5)计算得到的跟踪标签的计算坐标为(x',y'),则有:

由式(6)变换得到修正后的跟踪标签计算坐标:

2.2 改进的LANDMARC 系统硬件
实验选用了RF Code 公司的M100 标签和M250阅读器。M100 是有源标签,对每个标签预编译7 个字符的ID 号,采用ASK 调制编码,典型传输范围为90 m。M100 标签可以通过编码设置成两种信标率,在低速状态下其寿命可达5年。
实验采用的M250 阅读器工作在308 MHz,工作范围为45 m,提供8 个递增的阅读范围。通过组态软件和应用接口,阅读器可在7.5 s 内读取500 个标签的数据,可同时监视1 400 个信标速率为10 s 的标签。
3 改进的客运站行李托运管理系统
3.1 系统构建
基于改进LANDMARC 算法的行李托运管理系统由固定在行李上的RFID 标签、托运处布置的参考标签、少量阅读器和数据管理系统组成,参考标签和阅读器位置如图2 所示。
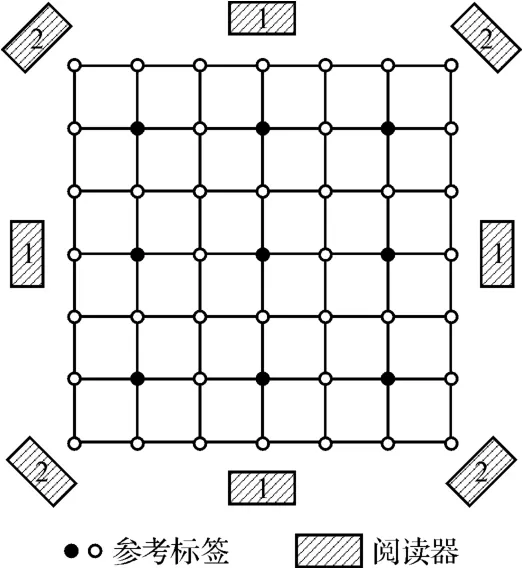
图2 阅读器和参考标签位置
当行李在列车站托运处时,行李上的标签处于静止状态,以低信标率发送自身ID 号和状态信息。当行李从托运处转移到列车上时,其中动作传感器被激活,标签以高信标率发送信息给阅读器。阅读器将实时收集到的射频信号强度信息通过TCP/IP 协议转发给后台系统。对于M250 阅读器,信息可以通过两种途径传递:一种为有线方式,即使用RJ45 端口以太网;另一种为无线方式,即通过802.11 b/g 标准传输。后台数据处理系统使用改进后的LANDMARC 算法计算托运行李的位置并在控制台上显示相应坐标。行李出站之前如果其RF 标签发生故障或者被人为破坏,则内置的纂改开关自动开启,发出警报信号,从而有效降低行李丢失和误拿概率。
3.2 实验结果分析
实验测试了不同配置和位置条件影响下的改进算法的性能,并与原算法进行了比较。
3.2.1 阅读器位置对定位精度的影响
实验先对阅读器不同摆放位置下的两种算法定位误差进行了比较,其结果如图3 所示。原算法在位置1和位置2 的平均定位误差分别为0.227 m 和0.184 m,而改进算法则是0.154 m 和0.152 m,结果表明4 个阅读器如位置2 摆放时较位置1 能有效提高LANDMARC 算法的标签定位精度,因此以下实验都将阅读器放在位置2。
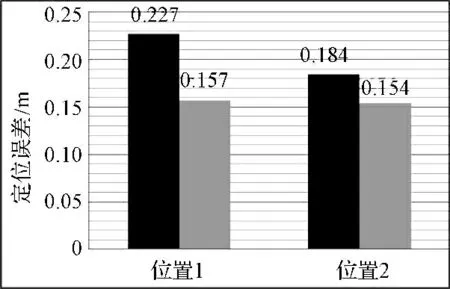
图3 阅读器不同位置的定位误差比较
3.2.2 参考标签间距对定位精度的影响
实验还选取和测试了参考标签的不同间距对改进前后两种算法的定位误差影响。结果发现,当标签间距离逐渐增大时,其定位误差也逐渐增大:当标签间距d=0.5 m 至d=1.25 m 时误差增速较缓,而后至d=5 m过程中则迅速增大。直观上,参考标签密度越大使得确定的定位区域越小,因而定位误差也越小。但实际应用中,随着标签密度增大,其标签间的电磁干扰也随之增大,从而导致定位精度反而下降。综合考虑各种因素,实验选定的标签间距为1 m。
3.2.3 不同参考标签数量下的算法耗时比较
两种算法的定位速度与参考标签数量之间关系的比较如图4 所示。当标签数量较少时(标签数量n =121 时),原始算法耗时0.092 s,改进算法耗时0.09 s,减少了2%的计算时间,改进的效果并不明显。随着标签数量增大,两种算法的计算负载差距越来越大,当n=260 1 时,原始算法耗时2.084 s;改进算法仅耗时1.394 s,减少了33%的计算时间。可见随着参考标签数量增加,改进算法避免了大量冗余计算,因而节约了计算时间,可以满足实时定位如动态跟踪的需求。
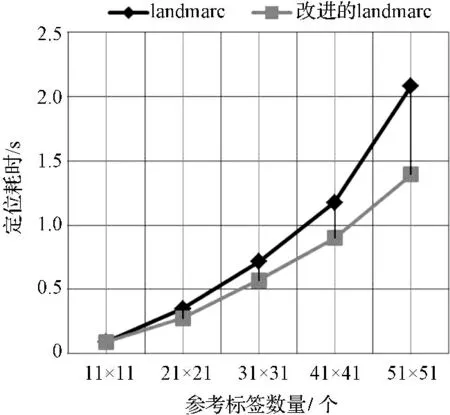
图4 算法定位速度比较
考虑到单次实验误差的偶然性,1 000 次实验结果比较如图5 所示。原始算法和改进算法的平均误差分别为0.19 m 和0.15 m,定位精度平均提高18%。改进算法利用参考误差修正跟踪标签的计算坐标,抵消了部分环境因素对定位精度产生的干扰,使得改进算法的定位精度优于原始算法。
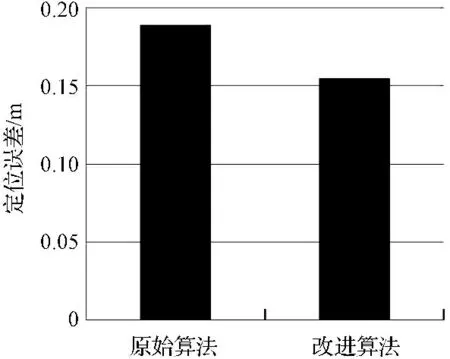
图5 算法的平均定位误差比较
4 结束语
本研究在讨论RFID 技术和改进LANDMARC 定位算法的基础上,结合火车客运站内行李物品定位的实际需要,提出了基于参考标签的分层结构用于改进原LANDMARC 算法。实验平台通过比较阅读器位置、参考标签间距和标签个数等参数比较了改进算法与原算法的定位效果,同时给出了在实验条件下的较佳配置参数。实验结果表明,改进算法具有更快的定位速度和更高的定位精度,具有一定的应用价值。
在改进算法的实际应用中还需考虑到人员走动、手机设备以及环境变化等干扰因素的存在,研究者在定位算法处理前必须对数据进行合理性判断,如通过指纹库模型和统计检验剔除异常数据,从而满足客运站应用场景下的实际物品定位要求。
[1]孙善武,王 楠,陈 坚. 一种改进的基于信号强度的WLAN 定位方法[J].计算机科学,2014,41(6):99-103.
[2]王殿君,一种基于WLAN 的RSSI 值获取方法[J]. 机床与液压,2013,41(17):41-43.
[3]张积洪,刘天浩.基于ZigBee 和GPRS 技术的行李定位系统[J].单片机与嵌入式系统应用,2013,13(11):60-62.
[4]刘小康,郭 杭.基于Zigbee 室内定位系统的指纹库优化算法[J].计算机工程,2014,40(2):193-198.
[5]MA Yong-tao,ZHOU Liu-ji,LIU Kai-hua,et al. Iterative phase reconstruction and weighted localization algorithm for indoor RFID-based localization in NLOS environment[J].IEEE Sensors Journal,2014,14(2):597-611.
[6]戴光麟,梁学利,肖致友,等.低温食品运输过程环境监测系统研究[J].机电工程,2014,31(2):191-194.
[7]蔺宏良,黄晓鹏. 车联网技术研究综述[J]. 机电工程,2014,31(9):1235-1238.
[8]汪 冬,葛万成,莫国民,等.基于参考标签可信度和偏差自校正的RFID 室内定位算法[J].计算机应用,2014,34(11):3170-3172.
[9]BASHERR M R,JAGANNATHAN S. Localization of RFID tags using stochastic tunneling[J]. IEEE Transactions on Mobile Computing,2013,12(6):1225-1235.
[10]李军怀,张果谋,于 蕾,等.具有环境自适应性的虚拟参考标签定位方法[J]. 应用科学学报,2013,31(4):402-410.
[11]邹学玉,韩付伟. 基于LANDMARC 的最近邻居改进算法[J].武汉大学学报:理学版,2013,59(3):112-116.
[12]KUCUKTUNC O, FERHATOSMANOGLI H. λ-diverse nearest neighbors browsing for multidimensional data[J].IEEE Transactions on Knowledge and Data Engineering,2013,25(3):481-493.