基于移动物联网的远程移动监控系统研究
2015-03-02计轶轩金明生
计轶轩 ,金明生
(1.上海神计信息系统工程有限公司,上海200331;2.浙江工业大学特种装备制造与先进加工技术教育部/浙江省重点实验室,浙江杭州310014)
0 引 言
物联网采用互联网技术实现人与机器、机器与机器相联[1]。移动物联网则采用无线通信技术实现了移动设备之间以及与固定设备的即时信息传递。移动监控系统是移动物联网的重要应用领域之一,其中的移动设备可分为人机交互终端和机器终端,均可实现各自在空间上的自由移动及相互间广义远程信息交互。
本研究提出一种基于Cortex 的远程监控移动终端的解决方案。
1 基于Cortex 的远程监控移动终端控制系统
移动监控系统中人机交互终端一般可直接使用智能手机、平板电脑和笔记本电脑。可移动机器终端则根据实际需求,有不同的机械结构和电路结构。机械结构可归纳为两类,一是行走机构,用以驱动和控制移动机器终端在二维和三维空间的移动和转向;二是执行机构,用以完成机器终端涉及的具体任务,如采集样本、视觉系统的转向等。
针对可移动机器终端的典型工作需求,笔者提出一种基于i.MX535 和STM32F103 的通用可移动机器终端控制系统,系统如图1 所示。

图1 通用可移动机器终端控制系统
该控制系统以飞思卡尔i.MX535 作为主控制器,用以实现监控系统顶层控制决策,复杂信息处理、导航、无线数据传输等功能。i. MX535 以ARM Cortex-A8 为指令构架,主频1 GHz,通过UART 接口,连接GPS 导航模块、ZigBee 和GPRS 通讯模块;同时可以通过SDIO 接口连接Wi-Fi 通讯模块;可以同时连接两路CMOS 图像传感器。另外,通过i.MX535 的并行I/O、I2C 总线、I2S 总线、USB 接口可方便与各类传感器连接。在软件方面,i. MX535 具有强大的多媒体信息处理能力,采用NEON 单指令、多数据的处理器扩展结构,支持MPEG-4、H.264 基准、JPEG、MP3、AAC 等图像格式,可以对H. 264 和MP3 等媒体编解码提供加速。
该控制系统采用意法半导体STM32F103xE(增强型)构成前端控制器,该芯片以ARM Cortex-M3 为指令构架,主频为72 MHz,具有I2C、UART、SPI、CAN、USB 等接口总线,可配置80 个快速I/O 端和3 个ADC(共计21 路输入通道)。前端控制器承担可移动机器终端机械系统控制、运动及环境信息感知、行走及机械动作执行器控制等任务。
控制系统配置了多类无线通讯功能。其中,WIFI模块RS9110-N-11-03 采用SDIO 接口与i. MX535 互联,采用5 GHz 频段,兼容802.11a/b/g 和支持单流802.11n。ZigBee 片上系统CC2530 采用8051 为内核,具有适应2.4 GHz IEEE802.15.4 的RF 收发器;GPRS 模块华为GM323,工作频段为GSM850/900/1 800/1 900 MHz,CC2530 和GM323 均采用UART 接口与i.MX535 连接。
可移动机器终端的行走部分采用两轮驱动模式,配合无驱动辅助轮保持机体姿态平稳,通过两个驱动轮的速度差实现移动机器终端转向,驱动电机的正反转控制移动机器终端倒车。本研究采用PMW 信号及H 桥模块实现对直流伺服电机的控制,PMW 信号由STM32F103 的TIM1 和TIM8 定时器提供。系统采用E6B2-CWZ6C 旋转编码器检测驱动轮的转速和行程,旋转编码器的输出脉冲通过TIM2 和TIM3 计数器接收。
可移动机器终端的定位信息通过Holux SIRF StarIII 或ENO-6 GPS 导航模块确定,它们均可通过串行接口与i.MX535 的UART1 连接,采用NMEA0183.22协议传输定位信息。
STM32F103 的并行I/O 接口输出开关量信号,用以控制电磁执行机构或小型直流电机驱动执行机构完成所需要的机械动作。
除采用GPS 外,该控制系统还通过光电、电磁感应等传感器跟踪地面所布置的轨迹特征线,进行精确定位。通过i.MX535 的CSI 和I2C 接口,可以连接两路OV5640 彩色CMOS 摄像头,CSI 接口用以传输图像数据,I2C 接口则用以接收控制命令。CMOS 摄像头既可以完成环境或目标物的检测,也可以用于轨迹跟踪。摄像头通过转向执行机构,可以实现180°旋转。
2 移动终端的无线接入方法
在图1 所示控制系统中,可分别或同时使用多种无线接入方法,将自身置于无线通讯网络中。
通过CC2530 模块,移动机器终端可接入ZigBee网络以实现300 m 距离内无线通讯,这种模式功耗低并可支持大量节点和多种网络拓扑形式,采用IEEE 802.15.4 通信协议(又称紫蜂协议),支持250 kbps(全球频段2.4 GHz)、40 kbps(美洲频段915 MHz)和20 kbps(欧洲频段868 MHz)的原始数据吞吐率[2-4]。

图2 ZigBee 网络结构

ZigBee 组网方案如图2 所示。其中:协调器为固定设备,汇聚节点和传感器节点为移动设备。可移动机器终端可作为全功能传感器节点(FFD)使用,既可传递本体检测的数据亦可传递其他节点发来的数据。移动终端也可作精减功能传感器节点(RFD)使用,仅限于向其它节点输出自己检测到的数据。多个可移动机器终端可组成星型、树状和网状3 种网络结构,并可通过有线LAN 将局部ZigBee 网连接至中央控制服务器,以实现现场数据的集中处理。
通过华为GM323 模块,移动机器终端可接入GPRS 网络。GPRS 面向GSM 用户,可实现长距离无线通讯,但传输速率较低(150 Kbps),且采用收费机制[5-6]。GPRS 网络的接入方案如图3 所示。

图3 GPRS 网络结构

GPRS 通讯中,移动机器终端通过GM323 模块成为移动公司的分站(DTU),采用动态IP 接入互联网,多个移动机器终端可以与一台数据服务中心(DSC)组合构成一个分布式数据采集系统。信息数据由现场移动机器终端上传到数据中心,数据中心的命令也可无线送达各个移动机器终端。移动机器终端和数据处理中心基于Socket 建立连接,移动机器终端是Socket 客户端,数据处理中心是Socket 的服务端。Socket 连接有TCP 协议和UDP 协议之分,移动机器终端和数据中心应使用相同的协议,可通过配置软件进行配置[7]。
移动机器终端通过RS9110-N-11-03 Wi-Fi 模块接入Wi-Fi 无线网络,传输距离可达到80 m~100 m,使用IEEE802.11 标准,2.4 GHz 频段,可提供11 Mbps 带宽,信号较弱时,可自动调整降低带宽以保证通讯的稳定性和可靠性[8]。Wi-Fi 网络只需建立热点(Access Point,接入点),即可实现设备间的通信。Wi-Fi 网络的接入方案如图4 所示。

图4 WiFi 网络结构

3 移动监控系统基于XMPP 的通讯
可扩展通讯和表示协议(extensible messaging and presence protocol,XMPP)[9-10]是一种基于SGM 子集XML 的开放式即时通信协议,用以定义XMPP 网络的基本架构和客户端与服务器之间、服务器与服务器之间的信息通信细节。扩展协议是对基础协议的补充,以适应XMPP 在特定领域中的应用。截止到2014年9月底,XEPs 已经超过350 项。
移动监控系统软件通过XMPP 可以完成移动的人机交互终端、机器终端与服务器之间基于GPRS、WiFi等异构网络之间的信息通讯。
3.1 移动监控系统的XMPP 通讯方法
XMPP 网络由XMPP 实体构成,实体包括协调器、中心站点、服务器等异构网络的数据服务中心,也包括移动机器终端作为XMPP 客户端。基本的XMPP 网络由一个服务器和若干客户端构成。基于XMPP-CORE规定,所有通讯数据须通过服务器中转。客户端与服务器基于XML 格式交换数据,其基本语义单位为XML 节,分为message、presence 和iq(Info/Query 的缩写)3 类,分别对应“推送”、“发布-订阅”与“广播”和“请求-响应”机制。XMPP 客户端-服务器交互示意如图5 所示。

图5 XMPP 客户端-服务器交互示意图
3.2 移动机器终端使用的物联网扩展协议
移动机器终端基于XMPP 实现客户端-服务器通讯时,需使用XMPP 关于物联网的扩展协议。其中XEP-0323 描述传感器数据通信的基础框架以及基本数据模型;XEP-0324 描述网络的访问控制管理;XEP-0325 描述控制机制;XEP-0326 描述集中器的管理;XEP-0347 描述机器终端接入XMPP 网络的方法[11-15]。
3.3 人机交互终端从机器终端获取数据
人机交互终端请求读取机器终端数据的过程如图6 所示。与其对应的XML 报文细节如下:
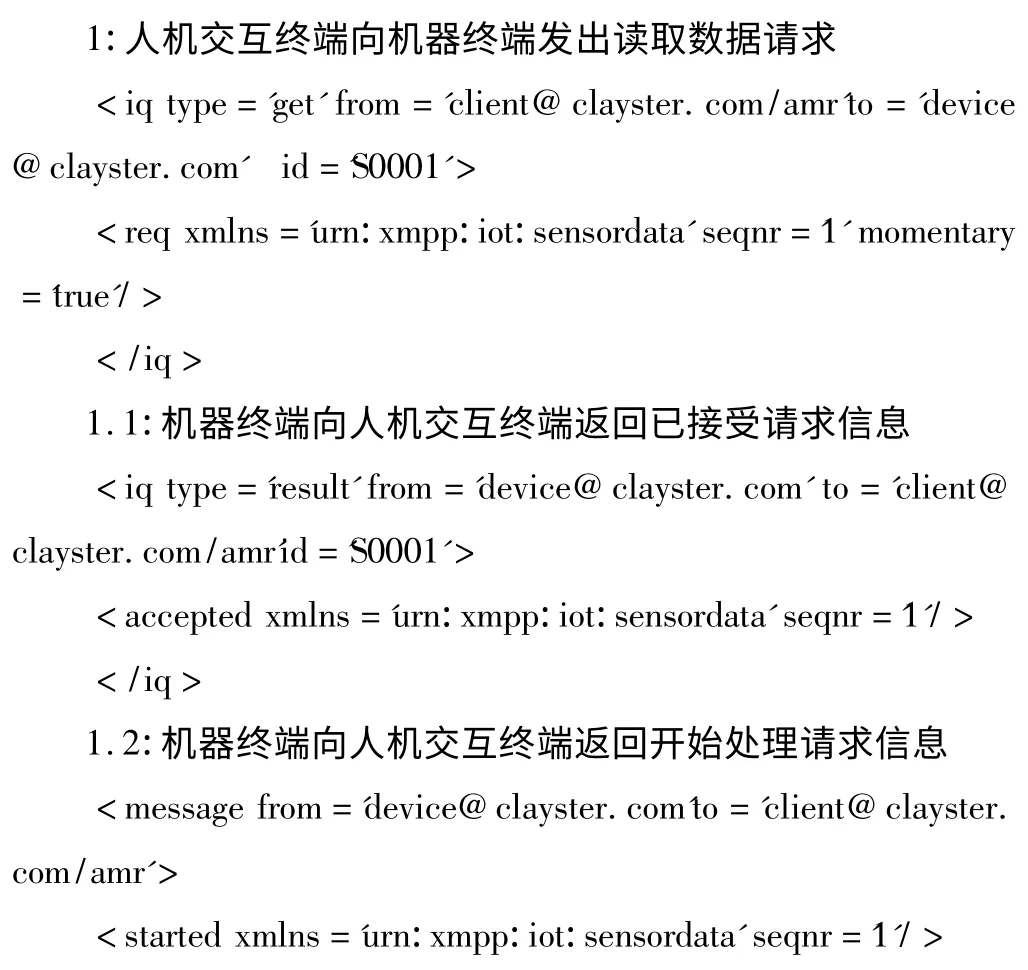


图6 人机交互终端请求读取机器终端数据的过程
3.4 人机交互终端对机器终端的控制
人机交互终端通过向机器终端发送控制命令(Control Commands)来控制机器终端工作,有两种不同的控制模式,具体如图7 所示。
(1)采用message 类的XML 节实现简单模式(请求无需响应):

(2)采用iq 类的XML 节实现请求-响应模式:



图7 人机交互终端对机器终端的控制
4 移动监控系统的应用案例
4.1 仓库安全巡检移动机器人案例
一种仓库安全巡检机器人的系统结构图如图8 所示。该机器人在图1 所示通用可移动机器终端平台基础上搭载了红外温度传感器、离子式烟雾传感器、催化燃烧式气体传感器、电化学式气体传感器和视频摄像头,用以巡检监控化学品仓库中的容器和管路可燃或有毒气体、液体的泄露,以及发现存在高温隐患的部位。
巡检机器人采用蓄电瓶供电,电气及驱动部分采取防爆安全设计,其通过GPS 导航和电磁引导方法,沿事先设计的巡检线路自主行走,通过GPS 导航方法定位所发现隐患点的位置坐标,用以对化学品仓库进行巡检。
隐患点的判断有两种方法,一是基于检测数据与标准阈值的对比;二是基于安全巡检机器人每次途径同一坐标点是检测数据和图像的变化。
安全巡检机器人的检测数据和图像,可通过GPRS 和ZigBee 等移动互联网,无线传递至监控中心平台。本研究定义机器人状态包格式和现场控制指令包格式,通过XMPP 协议按字节流实现数据的无线传递。视频摄像头通过实时传输/实时传输控制协议(RTP/RTCP),实现视频数据流的传输。RTP 实现实时数据传输,RTCP 提供流量控制和拥塞控制,确保数据包可靠传送。通过将RTP 和RTCP 配合,能以有效的反馈和最小的开销使传输效率最佳化。
4.2 电子标签巡检移动机器人案例
电子标签巡检机器人采用通用可移动机器终端平台,搭载超远程电子标签阅读器、光电传感器、视频摄像头,用以盘点仓库货架上对应货物的种类和存在与否,确定货物存放的具体位置,并将巡检结果通过无线网络传输给仓库管理中心服务器。巡检机器人的系统结构图与图8 类似。
电子标签读写器采用远睿通IVT920-4A 读写器,通过RS-232 与通用可移动机器终端平台中i. MX535的UART 接口连接进行数据通信。该读写器采用Intel的Impinj Indy 读写器芯片R2000,工作频段920 MHz~925 MHz,具有先进的抗干扰性,通过防碰撞性DRM算法,每秒可处理超过250 个标签;具有超高灵敏度,读取距离超过12 m。
本研究通过GPS 导航、光电传感器和视频摄像头,保证巡检机器人按设定的巡检路径进行巡检,并基于GPS 导航、光电传感器和视频摄像头确定货物位置坐标,巡检机器人保持与被检货架相距0.5 m 左右的距离,可以感应到高达10 m 的货架顶端的货物箱体的电子标签,并可同时读取多达250 个标签的标识数据。货架上按一定距离间隔,布局定位电子标签,定位电子标签确定了货架的空间位置基准。
5 结束语
本研究提出了一种通用可移动机器终端,该终端可采用多种无线网络接入方法。其中:ZigBee 接入方法,支持多个移动终端实现自组网,可基于位置关系以及远近优选数据传输路径;GPRS 接入方法不需固定占用无线信道,可融合有线网络和无线网络进行移动终端间超远程数据传输;Wi-Fi 接入方法,通过热点模式建立局域无线网络,并可以借助热点与有线网络的连接实现局域无线网络之外的超远程数据传输。该系统采用XMPP 的信息通讯模式,不但支持基于ZigBee、GPRS 以及Wi-Fi 同构无线网络数据传递,还可应用于不同接入方法的移动终端在异构移动网络之间的信息通讯。
本研究给出了两个应用实例,通过采用本研究提出的通用可移动机器终端为基本平台,配置相应的扩展器件,构建仓库安全巡检移动机器人和电子标签巡检移动机器人,实现对仓库安全和货架货物的移动巡检。
[1]刘 锦,顾加强.我国物联网现状及发展策略[J].企业经济,2013(4):114-117.
[2]张 任,王坚锋,严 海.基于ZigBee 的无线传感器网络节点设计[J].机电工程,2008,25(8):18-28.
[3]蔡利婷.基于ZigBee 和GPRS 的远程监控应用研究[D].广州:广东工业大学计算机学院,2012.
[4]王 盈,陶 猛.基于ZigBee 和GPRS 的液压设备远程故障诊断系统[J].液压气动与密封,2012(9):48-51.
[5]刘志雄.基于GPRS 通信技术的数据中继的研究与应用[D].厦门:厦门大学信息科学与技术学院,2008.
[6]虞明雷,姜媛媛.基于GPRS 的无线数据传输系统[J].机电工程,2007,24(5):34-36.
[7][作者不详].鸿鹏电子DTU 产品说明及使用配置手册_V3.5[EB/OL]. http://www. docin. com/p-699037808. html.2014-10-12.
[8]Redpine Signal,Inc. RS9110-N-11-03_Module_DataSheet[EB/OL]. http://www. docin. com/p-441618789. html.2014-10-12.
[9]XMPP 标准基金会. RFC 6120-Extensible Messaging and Presence Protocol (XMPP):Core[EB/OL]. http://xmpp.org/rfcs/rfc6120.html.2014-10-12.
[10]XMPP 标准基金会. RFC 6121-Extensible Messaging and Presence Protocol (XMPP):Instant Messaging and Presence[EB/OL]. http://xmpp. org/rfcs/rfc6121. html.2014-10-12.
[11]XMPP 标准基金会. XEP-0323:Internetof Things-Sensor Data[EB/OL].http://xmpp.org/extensions/xep-0323.html.2014-10-12.
[12]XMPP 标准基金会. XEP-0324:Internet of Things-Provisioning[EB/OL]. http://xmpp. org/extensions/xep-0324.html.2014-10-12.
[13]XMPP 标准基金会.XEP-0325:Internet of Things-Control[EB/OL]. http://xmpp. org/extensions/xep-0325. html.2014-10-12.
[14]XMPP 标准基金会.XEP-0326:Internet of Things-Concentrators[EB/OL]. http://xmpp. org/extensions/xep-0326.html.2014-10-12.
[15]XMPP 标准基金会.XEP-0347:Internet of Things-Discovery[EB/OL]. http://xmpp. org/extensions/xep-0347. html.2014-10-12.
