基于ARM的双无刷电机自动门控制系统设计
2015-03-01张进峰刘星桥淮文军
张进峰,刘星桥,淮文军
(1.苏州市职业大学 电子信息工程学院,江苏 苏州 215104;2.江苏大学 电气工程学院,江苏 镇江 212013)
基于ARM的双无刷电机自动门控制系统设计
张进峰1,2,刘星桥2,淮文军1
(1.苏州市职业大学 电子信息工程学院,江苏 苏州 215104;2.江苏大学 电气工程学院,江苏 镇江 212013)
针对适合在小空间运行的新型双臂翻板门的负载特性,设计基于ARM控制的直流无刷电机控制系统.采用磁场定向控制算法控制直流无刷电机的电机定子相电流,使之接近于正弦波,使得电机运行平稳、响应快,提升机构的运行动态性能.负载自学习的功能提高门运行的安全,CAN通信模式实现模块化硬件控制结构,使得系统运行可靠性高、易于维护.
翻板门;直流无刷电机;磁场定向控制;CAN
近年来,直流无刷电机随着自动门在智能建筑得到广泛的应用[1].一般的自动门为平移开闭方式,门负载较为平稳,控制相对简单,常常采用微处理器控制功率电桥产生周期性方波的控制方式[2-3].这种门运行需要较大的空间,在左右运动空间有限的场合使用受到限制,其控制方式的缺点是驱动转矩的脉动成分相对较多,运行噪声大.双臂翻板门是一种新型的自动门,结构原理如图1所示,其结构紧凑,门开启关闭时做上下翻转运动,克服了在狭小场合门运行空间不足的问题.图1中门右立柱驱动电机受控旋转带动与齿轮条连接的门右臂,以定位销作为支点做杠杆旋转运动.门左臂作为协从机构依靠弹簧的伸缩配合右臂运动.整个过程中驱动电机的负载变化大,控制系统必须在运行过程中根据门运行位置以及机构受力的情况调整门的运行速度,才能完成大门的平稳、快速地开启和关闭.直流无刷电机的结构保证转子转动时定子绕组上产生反电势接近正弦波,具有无电刷,响应快速、较大起动转矩的特点,但必须结合相应的控制算法[4],使得电机定子相电流接近于正弦波,才能实现直流无刷电机良好的控制效果[5].本设计采用ST公司的ARM芯片结合无刷电机磁场矢量控制算法,实现负载变化较为复杂的双臂翻板门在狭小空间内的平稳、快速运行,同时应用CAN通信实现机构中呈分散分布的控制显示、探测传感器等信号通信控制,使系统连接简单、调试与扩展方便[5].

图1 翻板门结构示意图
1 系统硬件设计
本控制系统框图如图2所示.直流无刷电机控制配套较为复杂的机械结构完成门的智能控制,以微控制器为核心的控制功率三相桥电路完成对电机磁场的矢量控制以及实现其他功能及保护措施,要求响应速度快,运行平稳可靠,所以选择运行速度快、接口丰富的ARM芯片STM32F103RE作为主控微处理器.控制系统主要有ARM微控制器STM32F103RE、MOSFET功率驱动模块、显示按键控制、极限位置及安全防夹检测、遥控接收电路等组成,模块之间信号连接通过CAN通信完成.
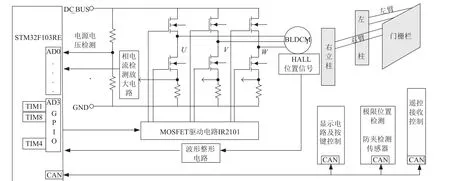
图2 直流无刷电机门控系统框图
1.1 电机驱动电路
电机三相定子绕组采用Y型接法,驱动控制采用三相桥式电路.通过微处理器内置高级定时器与器件特定输出PWM硬件特性结合FOC矢量控制算法,输出16 kHz的PWM波控制MOSFET专用驱动芯片IR2101,实现对低导通电阻场效应管75NF75上下桥臂控制,施加在电机的定子绕组实现正弦波旋转磁场与转子磁场相互作用驱动电机转子运动.电机转子位置及转速由电机内置霍尔位置传感器采集,信号处理电路采用具有滞回比较功能的施密特触发电路,滤除毛刺干扰后送给ARM处理器的中断输入口实现对电机转子位置判断及转速准确测量.驱动电路中设计主回路过流、电压过压检测等保护电路.
1.2 相电流采集电路
功率驱动电路中采用电阻串联相绕组的方法实时采集相电流,电机每相绕组在Y型连接前串联低阻值精密功率采样电阻.由于直接采样的电流信号值小,不适合直接送给ARM高速AD采样,所以实时采集PWM调制的相电流.该信号必须抬升基准电平后叠加被采集信号,使得采样值落在模拟输入采集范围中间数值段,充分利用模数转换器的分辨率,过程中采用高速运放放大以保证相电流信号不失真放大,如图3所示.图3中R41、C30从取样电阻上获得相电流信号滤波,R36、R37、R38直流偏置电路将输入信号抬升至合适的电平位置,通过运放及反馈放大系数电阻 R44、R45完成输入信号放大.为了防止门运行过载以及在下降过程中压到进出的车辆,同时减轻微控制器程序计算的工作量,在运放输出端分成两路不同滤波特性信号,一路送给高速调制波信号供微处理器磁场计算,另一路通过低通滤波后得到直流电压,作为微处理器判断门是否受阻直接判断的依据,减轻系统软件的计算消耗,提高系统的快速响应能力.
1.3 CAN通信电路
控制系统中以电机控制单元为CAN主收发器,通信系统将多路的输入信号及输出控制信号通过数据命令来完成,实现系统的模块化设计.ARM内置的CAN 硬件管理器具有识别地址的功能,简化CAN通信的协议对地址码的判别,提高通信效率及系统的可靠性.由于通信线路较长,部分延伸至立柱外,可能会受到外界如汽车点火等因素的影响.为了保证电机控制器信号不受干扰,在电机控制器与外围电路通信之间采用光电隔离电路,如图4所示.图4在光电隔离芯片的驱动端增加了驱动晶体管V7、V8,提高通信线路的驱动能力及抗干扰的能力.

图3 相电流信号放大电路

图4 CAN通信光电隔离电路
2 系统软件设计
STM32F103RE微处理器具有与高速定时器结合的高性能PWM功能、高速AD以及丰富的外设,为实现电机的磁场控制及系统智能学习功能提供硬件基础.对直流无刷电机的磁场控制采用矢量控制算法,在软件上实现电机励磁电流和负载电流的分离,分离的磁场在空间上互相垂直[6],使得直流无刷电机调速的机械特性及动态性能达到传统直流控制调速的性能.对系统特殊的负载特性采用智能学习的方法,使得控制系统适应系统机械硬件的特性,较好地实现控制及保护功能.
2.1 磁场矢量控制
直流无刷电机的三相定子绕组呈120o对称分布,转子转动时定子绕组上产生反电势接近正弦波,控制相电流趋近于正弦波能很好地克服其转矩脉动.无刷直流电机相绕组通电流时产生的转矩为[7]

式中:ZD为每相绕组的有效导体数;L为绕组的有效长度;r为气隙的半径;I为相电流;θ为转子与定子磁场的夹角.
由此可知当转子的气隙磁场与相电流保持垂直角度时,即当定子激励磁场与转子磁场的夹角为90°时,转子输出力矩最大.矢量控制算法通过测量和控制三相定子电流矢量,根据磁场定向原理分别对其励磁电流和转矩电流进行控制,使得系统达到优异的直流调速控制性能[8],实现程序框图如图5所示.采样电阻采集相电流经过高速放大,微控制器通过AD通道的中断功能采集获得相应时刻的ia、ib,同时通过霍尔传感器获得转子的位置,从而获得转子的磁角度.通过三相-两相Clark变换以及交流-直流坐标变换Park变换得到两个直流分量,即与转子的磁链平行的id及和转子磁链垂直且超前90°的iq.计算Vqs、Vds值时程序中采用增量式PID数字离散化算法,PID算法保证系统超调小,快速稳定地计算控制电压输出结果[9-10].PID的过程变量、输出在程序计算过程中分别考虑与设定最大值的比较,一旦计算值越界系统自动将其转成极限值.然后反Park计算后微控制器通过高速定时完成脉冲宽度调制的SVPWM控制输出实现对直流无刷电机的控制.
2.2 负载特性自学习设计
翻板门要实现翻举的动作,运动机构相对复杂.为降低整个机构的耗能效率配有弹簧伸缩动作协助机构运动,门在不同位置弹簧的形变情况不同,上位机系统通过CAN通信口采集的位置-电流特性负载曲线,如图6所示.在弹簧释放-伸展-拉伸过程中电机力矩不断发生变化,而在下降过程中必须考虑防止门板压到突然出入的车辆,所以门板动作过程中电机相电流报警极限值需要随着位置的改变不断改变,才能较好保护机构及保证运行的安全.单个过程极限电流值显然不合理,在电流曲线顶部保护值显得裕量不够,会频繁报警,而在底部显得裕量偏大,即使压到出入的车辆还会继续下行直到超出极限,起不到保护作用.基于以上特性在程序设计时加入了智能学习的功能,在门初始安装时需要学习门上升、下降过程中的电流特性,保存在flash存储器内,运行时微处理器根据位置的变化从存储器中不断读出相应的电流极限值,更新负载当前位置的极限电流保护值,及时调整运行参数.程序流程图如图7所示.程序中的学习标志可以由控制系统键盘设定学习存储动作,正常运行清除学习标志,读出与位置对应学习值加上一定的裕量作为受阻报警及保护极限.

图5 矢量控制程序框图
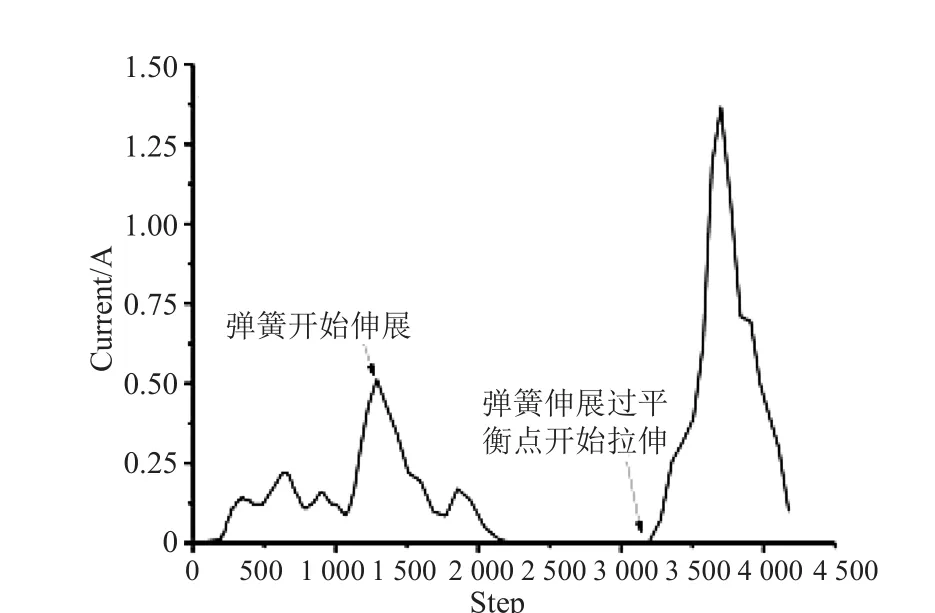
图6 上升时的电流曲线
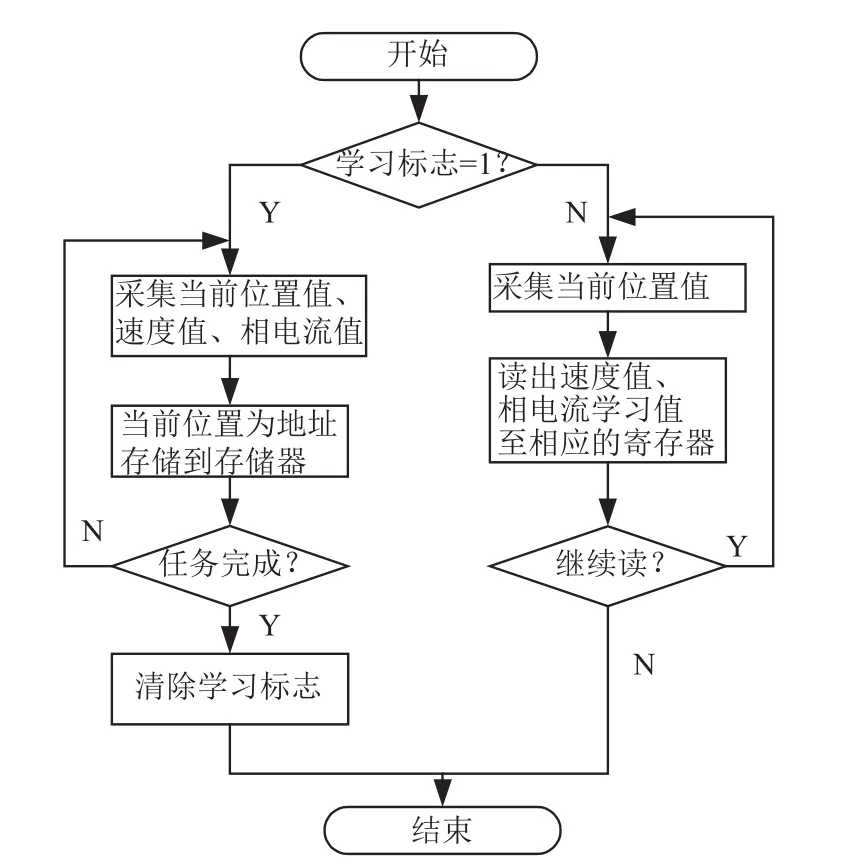
图7 自学习程序流程图
3 调试
在调试过程中,将三相桥MOSFET的PWM开关频率设定在16 kHz,死区保护时间设为800 ns,每2 ms进行一次PID调节计算.用示波器TDS220监测相电流采样放大后的信号以及电机绕组相电压信号,如图8所示.正弦波相电流信号稳定,直流偏置在1 V左右,比较适合AD通道的采集.相电压SVPWM的调制能较好地符合正弦脉宽调制波的要求.电机运转时的噪声比传统的方波驱动小,且带负载能力强,门动作平滑、响应快.电机的输出轴连接了250∶1的减速齿轮,在初始阶段电机慢速平稳加速起步,超过500步后恒速运行将门提高到一定的高度.当位置超过1 000步后,系统借着弹簧的回复力控制门速度快速提升,平稳越过整个机构的最大力矩点,接近停止位置开始快速减速,保证平稳停止.整个过程中 PID算法根据学习的位置-电流参数以及预设置的速度参数数据快速计算,调整输出,以适应过程中负载特性多变的特性,克服弹簧转换点力矩变化,使得门运行快速平缓,符合起步、停止时慢速,中间快速的实际需求.自学习功能能很好保护设备和保证车辆出入的安全,提供用户能根据需求调整保护裕量的大小功能.

图8 驱动信号测试波形
4 结论
本设计基于ARM控制的直流无刷电机在自动翻板门控制中的应用,实现了翻板门在狭小空间内平顺地开启、关闭及其相关的保护、学习等功能,体现矢量控制算法的优势及ARM高效、丰富的接口功能以及CAN通信系统模块化性能.这些特性使得在驱动控制、信号转换、参数设置以及调试扩展方面非常方便,系统整体性能超越了一般的自动门控制器,进一步体现翻板门的结构及其控制方式运行优势.试验结果表明系统稳定、可靠、安全,符合设计要求,具有一定的实用价值,目前已投入到实际的应用中.
[1] 张宏涛,刘国海,田翔,等. 自动门用永磁无刷直流电动机的设计[J]. 电机控制与应用,2009,36(7):1-4.
[2] 韦敏,贾惠芹. 电动车用电动/发电永磁无刷直流电机的控制系统研究[J]. 微电机,2011,44(4):102-105.
[3] 钟晓伟,宋蛰存,许刚. 电动自行车用无刷直流电机控制系统设计[J]. 电机控制与应用,2011,38(1):20-24.
[4] JANPAN I,CHAISRICHAROEN R,BOONYANANT P.Control of the brushless DC motor in combine mode[J].Procedia Engineering,2012,32:279-285.
[5] 赵鹏飞,俞建定,骆国庆,等. 永磁无刷电机换相转矩脉动抑制算法设计[J]. 微电机,2014,47(11):79-88.
[6] 赵文祥,刘国海,吉敬华,等. 基于DSP的全数字矢量控制SVPWM变频调速系统[J]. 电机与控制学报,2004,8(2):175-178.
[7] 张琛. 直流无刷电动机原理及应用[M]. 北京:机械工业出版社,2004.
[8] BLASCHKE F.The principle of field orientation as applied to the new transvektor closed-loop control system for rotating-field machines[D]. Berlin:Siemens Review,1972.
[9] 徐晓东,段攀登,蒋益兴. 基于STM32的免调试无刷直流电梯门机控制系统[J]. 常州大学学报:自然科学版,2014,26(3):39-43.
[10] 赵亮,刘星桥,韩 彬,等. 基于DSP 的无刷直流电机模糊控制系统的设计[J]. 电力电子技术,2009,43(5):40-42.
(责任编辑:沈凤英)
Design of Dual-BLDC Motor Based on Arm Microprocessor in Automatic Door Control System
ZHANG Jin-feng1,2,LIU Xing-qiao2,HUAI Wen-jun1
(1.School of Electronic Information Engineering,Suzhou Vocational University,Suzhou 215104,China;2.School of Electric Engineering,Jiangsu University,Zhenjiang 212013,China)
Aiming at automatic performance and space requirements of an automatic flap door with complex load property,a controlling system based on ARM micro-processor control unit is designed.In this control system,the field-oriented control algorithm for the magnetic field of BLDC improves the rigid output performance and dynamic characteristics of the motor with sine wave phase current.The ability of learning mechanical property intelligently enhances the reliability of the system.The CAN communication method is applied to the modular hardware units.All the features make the running of the motor more stable,and the response faster and easier to maintain and upgrade.
automatic flap door;brushless DC motor;field-oriented control;controller area network
TP273+.1
A
1008-5475(2015)03-0020-05
2015-05-18;
2015-06-20
江苏省高等职业院校国内高级访问学者资助项目(2014FX069);江苏省高等学校大学生实践创新训练计划资助项目(201411054001Y);苏州市职业大学创新基金资助项目(2014SZDCC10)
张进峰(1974-),男,江苏常熟人,高级工程师,硕士,主要从事工业自动化控制与信号检测系统研究.
