达芬奇化身真“大白”
2015-03-01金振宇
□文/金振宇
达芬奇化身真“大白”
□文/金振宇

机器人给患者做外科手术?在迪士尼今年出品的奥斯卡最佳动画长片《超能陆战队》中,“萌萌哒”私人健康助理“大白”萌化了众多少男少女。虽说导演创造出的“大白”是理想世界中的人工智能产物,但其实,现实生活中早已存在真实的“大白”,那便是由美国直觉外科公司研发的“达芬奇手术机器人”。可以说,在保护人类健康方面,达芬奇比“大白”更进了一步。
机器人手术在欧美发达国家已拥有十多年的发展历史,但在我国则处于刚刚起步阶段。
根据治疗疾病的不同,机器人手术大致可分为外科微创手术机器人、神经外科定位介入机器人、骨科脊柱/关节置换机器人等。其中应用最广泛、最具代表性的是达芬奇手术机器人,它适合普外科、泌尿科、心血管外科、胸外科、妇科、五官科、小儿外科、移植外科、头颈外科等微创手术,主要用于切除人体胸腔、腹腔内各种良恶性肿瘤。达芬奇手术机器人进一步拓宽了以往外科微创手术的范畴,引领着外科微创手术的高新技术和前沿水平。
达芬奇手术机器人自2000年开始首先在美国投入临床应用,在我国的应用起始于2008年,由中国人民解放军总医院率先引入,至今中国大陆共有29台,中国香港地区9台、台湾地区24台。
神奇的达芬奇手术机器人
达芬奇手术机器人是由美国直觉外科公司(Intuitive Surgical)研发制造,它并没有所谓的AI自主智能程序来自动完成手术操作,而是一种主仆式(Master—Slave)操控系统。该系统包括三个部分。手术时主刀医生坐在操控台(Surgeon Console)中,双手各握一操纵摇杆,双脚控制多个功能踏板,双眼观察内置显示屏进行手术操作。在患者手术床边,床旁机械臂系统(Patient Cart)将三条或四条机械臂通过直径0.5-1.2厘米的穿刺孔引入患者体内,其中一条为镜头臂,前端是双目摄像头,获取患者体内的立体影像。另外两条或三条为器械臂,前端可配置抓钳、剪刀、持针器、拉钩、吸引器等数十种手术器械,该器械尖端同步还原主刀医生摇杆的动作(进退、屈伸、旋转、开闭等)进行手术。视频车(Vision Cart)在一旁提供外置屏幕影像及各种手术辅助设备。上述三个系统通过数据线连接。目前由于网络通信不稳定以及延时高的缘故,达芬奇机器人并不支持远程异地遥控手术。
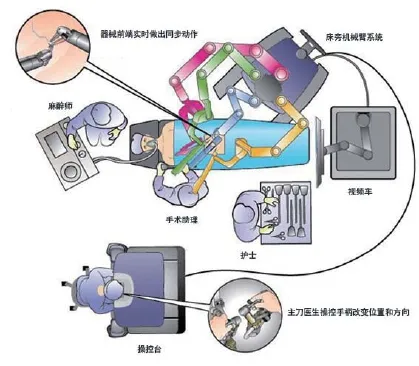
图1 手术室布局
达芬奇手术机器人还具有以下技术特点:1.高清晰的三维视频成像技术,镜下图像可放大至少10倍以上,利于医生观察到细微的病灶变化等解剖结构;2.动作比例调整,主刀医生操控控制杆的动作幅度与器械尖端的动作幅度等比例缩小。例如在精细模式3:1下,主刀医生平移手3厘米,对应器械尖端移动1厘米,故主刀医生的操作变得更为精细稳定,并且能有效过滤医生手部小幅度的自然颤抖;3.可避免主刀医生与患者直接接触而降低职业感染风险,舒适的坐姿操作有利于提高手术质量,延长外科医生的职业寿命。

图2 从左至右依次是2台操控台,1台床边机械臂系统,1台视频车
从第一代到第四代
经过近十年的发展及更新换代,目前应用于临床的是第二代达芬奇(Da Vinci S,2005)手术机器人、第三代达芬奇(Da Vinci Si,2008)手术机器人和第四代达芬奇(Da Vinci Xi,2014)手术机器人。第一代达芬奇(Da Vinci Standard,2000)手术机器人已被淘汰,厂家不再销售及提供技术支持。达芬奇手术机器人产品及其配属设备器械尚在持续研发和创新中。
供双人操控的双操控台配置
第三代和第四代达芬奇手术机器人支持双操控台,可供两位医生同时现场操控。达芬奇手术机器人拥有一条镜头臂和三条器械臂,一位医生同一时间只能控制一条镜头臂或两条器械臂,要控制第三条器械臂时,需使用脚踏板进行切换操作。而在双人双操控台的情况下,两位医生可以同时控制这三条器械臂移动,可优化部分手术步骤以提高效率,节省手术时间。双操控台亦可用于经验丰富的机器人医生同步带教新手机器人医生。
达芬奇手术模拟训练器
第三方软件公司MIMIC研发的达芬奇手术模拟训练程序,可以通过一个外置机箱结合第三代达芬奇手术机器人的操控台,供医生进行模拟训练。目前训练内容是虚拟实境的教程,让操控者熟悉掌握机器人的手柄、脚踏板等操控。使用达芬奇手术模拟训练器可缩短医生的学习曲线,纠正某些错误操作,或节省动物手术实验的经济成本。
术中荧光显影技术
将一种名为吲哚青绿的荧光染料注入人体血液,该染料将会与血浆蛋白结合,能被特殊的近红外摄像镜头捕获。第三代、第四代达芬奇手术机器人可将捕获的影像进行同步渲染,在医生视野中呈现出亮绿色。根据该染料注入血管后的时相,医生将可以鉴别动脉、静脉、胆道、输尿管等组织,以方便医生进行复杂解剖区的鉴别和消化道切缘血供的判断。根据特定肿瘤、转移淋巴结和邻近器官组织对该染料的不同嗜性,医生也可获得不同于普通肉眼观察的判断能力,以方便医生在实体脏器中确定肿瘤边界,在脂肪组织中寻找淋巴结。
达芬奇单孔手术设备
第三代、第四代达芬奇手术机器人可进行单孔机器人手术。通过一个特制的多通道套管、一条镜头臂和两条交叉弯曲的器械臂,经由一个直径2cm至3cm的切口进入患者的体腔内,机器人的软件将控制手柄和器械进行重新配对,以便医生的左手继续控制视野左边的器械,右手控制视野右边的器械,这样就避免了普通单孔腹腔镜下左右手反向交叉操控的不适,降低了单孔手术的操作难度。
多样化手术器械
越来越多的达芬奇手术器械正在被研发制造并投入临床应用中。冲洗吸引器,带转腕功能,可以探入普通腔镜吸引器难以抵达的部位,进行吸引或冲洗操作。术中腔内超声探头,可由主刀医生控制,柔性设计带有转腕功能,可探查实质性脏器(如肝脏、胰腺、肾脏、子宫等)内部的肿瘤大小、边界及血流供应情况。直线切割吻合器,带转腕功能,由主刀医生操控,可更好地把握切割吻合角度。
全球装机3266台3266
截至2014年底,我国(港澳台地区未统计在内)配置达芬奇手术机器人的医院共有23家,共配置达芬奇手术机器人29台,其中包括地方三级甲等综合性医院13家:复旦大学附属华东医院、上海交通大学附属瑞金医院、复旦大学附属中山医院、北京协和医院、南京鼓楼医院、四川省人民医院、上海仁济医院、浙江大学附属第一医院、浙江省人民医院、郑州大学第一附属医院、安徽医科大学第一附属医院、青岛大学附属医院、南昌大学附属第一医院;地方三级甲等专科医院3家:北京地坛医院、上海交通大学附属胸科医院、吉林省肿瘤医院;军队三级甲等综合性医院7家:中国人民解放军总医院、中国人民解放军第二炮兵总医院、第三军医大学附属西南医院、南京军区南京总医院、沈阳军区总医院、第二军医大学附属长海医院、济南军区总医院、第四军医大学附属西京医院。在上述医院中,中国人民解放军总医院共配置达芬奇手术机器人6台,其他医院各1台。
全球达芬奇手术机器人最新装机情况(截止到2014年12月30日):全球共3266台,其中美国2223台,欧洲549台,亚洲350台,其他地区144台。

图3 全球达芬奇手术机器人最新装机情况

图4 我国达芬奇机器人手术完成情况
临床应用年增10%
2014年,全球各国完成达芬奇机器人手术共计约57万例,2013年为52万例,年手术量同比增长约10%。其中,美国以外国家2014年共完成达芬奇机器人手术约12万例,年手术量同比增长约20%。
我国配置达芬奇手术机器人的23家医院,在2014年内共完成达芬奇机器人手术4926例,2013年共完成2984例,同比增长65%。2012年共完成1546例,2011年共完成808例。截止到2014年底,历年累计完成达芬奇机器人手术11471例。
在泌尿外科的临床应用
2014年,我国各医院共完成机器人泌尿外科手术2220例,2013年为1123例,同比增长197.7%。泌尿外科历年累计机器人手术量达到3984例。手术类型涵盖机器人前列腺癌根治术、机器人肾癌根治术、机器人肾部分切除术、机器人肾盂整形术、机器人膀胱癌根治术、机器人输尿管肾盂癌根治术、机器人输尿管膀胱再植术、机器人肾上腺肿瘤切除术、机器人输尿管切开取石术、机器人腹膜后肿瘤切除术等所有普通腹腔镜所开展的手术,以及数例小儿泌尿外科手术。
在普外科的临床应用
2014年,我国各医院共完成机器人普外科手术1495例,2013年为1061例,同比增长40.9%。普外科历年累计机器人手术量达到4195例。
手术类型涵盖肝胆胰外科、胃肠外科、结直肠外科绝大多数腔镜手术。肝胆胰方面主要涵盖机器人远端胰腺切除术、机器人胰十二指肠切除术、机器人胰中段癌切除术、机器人保留幽门的壶腹部肿瘤切除术、机器人胆总管探查术、机器人胆管癌切除并胆肠吻合术、机器人肝脏肿瘤切除术、机器人胆囊癌切除术、机器人胰岛素瘤切除术等。胃肠方面主要涵盖机器人胃大部切除术、机器人全胃切除术、机器人结直肠癌根治术、机器人食管裂孔疝修补术、机器人胃底折叠术、机器人减肥手术等。
在心脏外科的临床应用
2014年,我国各医院共完成机器人心脏外科手术161例,2013年为160例,较上年持平。心脏外科历年累计手术量达到976例。手术类型涵盖全机器人冠脉搭桥、机器人小切口冠脉搭桥、机器人二尖瓣修补或置换、机器人室间隔缺损修补术、心包粘液瘤切除术等。
在妇产科的临床应用
2014 年,我国各医院共完成机器人妇科手术618 例,2013 年为393 例,同比增长57.3%。妇产科历年累计手术量达到1203 例。手术类型涵盖机器人妇科恶性肿瘤根治术(包括保留神经功能的广泛性全子宫切除,盆腔淋巴结清扫,腹主动脉旁淋巴结清扫术等)、机器人子宫肌瘤挖除术、机器人全子宫切除术、机器人输卵管吻合术、机器人骶骨阴道固定术等。
在胸外科的临床应用

2014 年,我国各医院共完成机器人胸外科手术481 例,2013 年为236 例,同比增长103.8%。胸外科历年累计手术量达到1088 例。手术类型涵盖机器人肺叶切除术、机器人胸腺瘤切除术、机器人后纵膈肿瘤切除术、机器人食管癌根治术等。
在其他学科的临床应用
除上述学科外,机器人手术亦有用于耳鼻喉外科治疗舌根肿瘤、咽喉部肿瘤等疾病,或用于小儿外科治疗先天性泌尿系统畸形等疾病。
进入黄金发展期
目前机器人手术医生反馈的问题集中在以下几点:
第一,操控无力反馈。即是手术器械接触、牵拉器官组织时,医生的操控手柄上不会有触碰的力量反馈,所有动作需要依靠视觉观察来掌握移动范围和用力程度。这对初学者会有所不适,需要一定的时间来熟悉掌握这种以视觉为主的操控方式。但由此带来的好处是所有操作变得轻盈省力,即使完成长时间高强度的手术后,也不会对医生手部肌肉带来过重的负担和疲劳感。
第二,无法远程操控。当初研发手术机器人的一个目标是为了远程手术,例如在美国某医院的医生通过操控台控制位于英国某医院的机器人为当地患者进行手术。但目前达芬奇手术机器人各系统间只支持有线信号连接通信。为了手术安全性考虑,目前的民用远程通信技术无法达到系统操控时的最大延迟要求,也无法保证长时间手术时通信的稳定性。而军用级或先进通信技术的成本让医院难以承受,无法用于医院的日常手术。
第三,机器人手术费用较高。由于技术垄断等因素,目前在微创外科领域的手术机器人只此一家。每例机器人手术费用较普通手术贵1 万元至5 万元不等。国内已有多家学术机构开始合作研发国产微创手术机器人,争取在保证系统性能稳定的基础上,实现价格的优势,增强日后进入市场的竞争力。
总之,我国外科机器人微创手术起步较晚。在国内,医疗机构配置手术机器人台数较少,有条件接触高端智能微创手术设备的外科医师人数有限,广大患者对于手术机器人还很陌生,机器人外科手术应用与国际应用水平尚存在距离。目前,在已装备达芬奇手术机器人的医院中,经过外科医学专家的共同努力,心脏外科已经迈入世界机器人外科的前沿,泌尿外科、普外科、妇产科等学科的机器人手术水平,正在迅速接近或赶超国际先进水平。在卫生行政部门的规划指导下,我国机器人外科微创手术正进入黄金发展期, 达芬奇手术机器人的逐步推广和应用,将快速提升我国外科领域微创手术的水平,造福广大患者。

金振宇 上海交通大学医学院医学硕士,美中互利医疗有限公司智能手术机器人临床应用专家
