建立国家机器人检测与评定中心的目标和作用
2015-03-01
建立国家机器人检测与评定中心的目标和作用
目标
建设国家机器人检测与评定中心,目标是建设第三方机器人检测和评定机构,实现机器人标准的制修订、机器人及相关部件的检测、机器人检测仪器和设备的校准、机器人产品准入制度、机器人相关信息的发布和技术培训、机器人技术的国际国内合作,搭建为机器人制造行业、机器人应用行业提供公共服务的平台。
作用
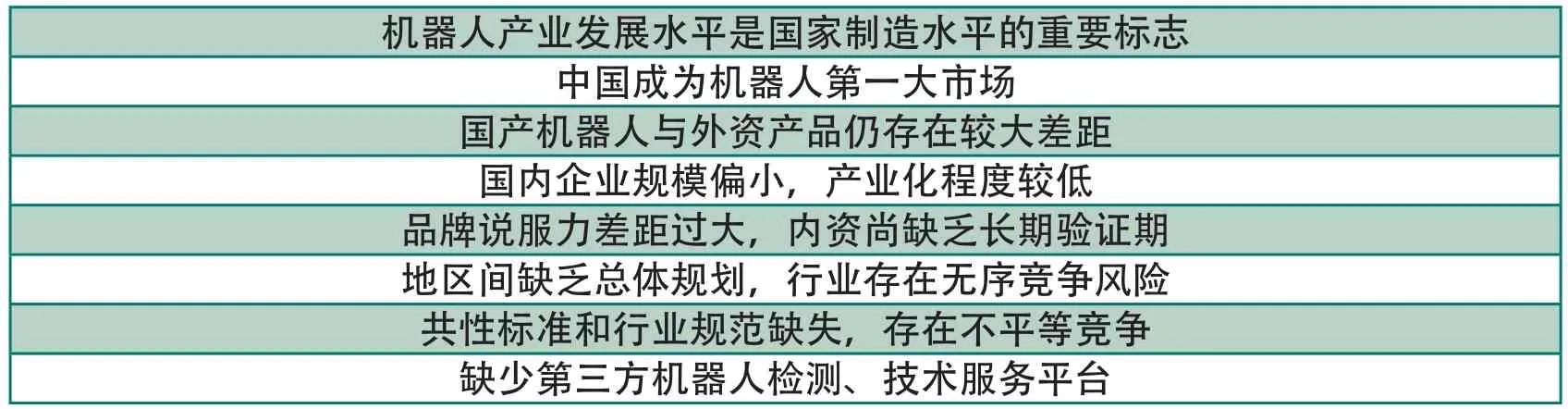
表1 国内机器人产业发展的需要
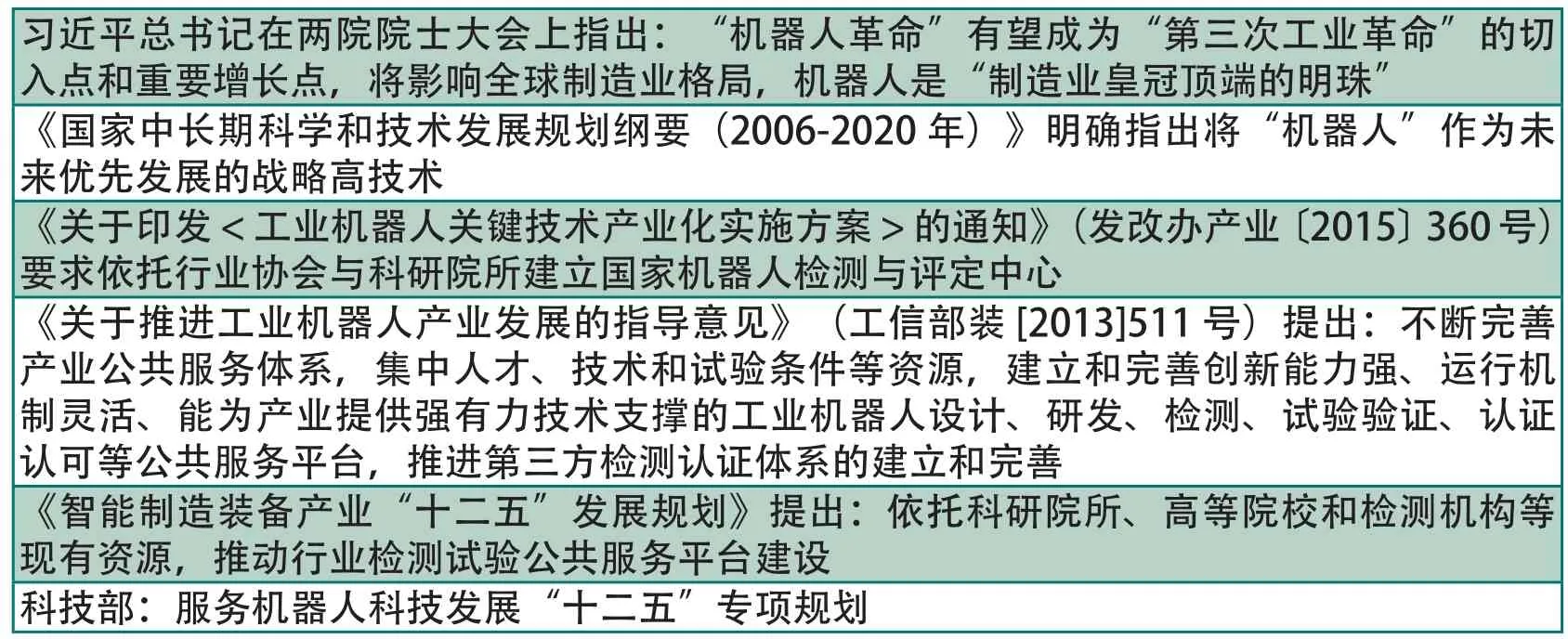
表2 建设国家机器人检测与评定中心有助于落实国家和地方政策
国家机器人检测与评定中心将形成机器人整机性能、关键零部件、安全性能和噪声检测、环境检测、能效检测、EMC、材料等专项性能测试能力和机器人用检测仪器的专业校准能力以及产品认证、标准研究、合作交流、培训咨询、期刊信息服务等公共服务能力。其中在检测能力建设方面将完成机器人整机、核心部件90%以上的检测能力建设,形成安全、环保、节能性能与耐久检测能力,技术服务条件和水平达到国际先进水平。
国家机器人检测与评定中心将协助主管部门加强标准体系顶层设计,引导行业标准发展,同时完善标准体系建设,协助组织编制我国机器人行业标准结构图和标准明细表,促进机器人标准化建设。
国家机器人检测与评定中心的建立,将促进行业从标准制订、产品研发、生产制造、检测/检验/认证服务到产品行业整体质量监管全过程的发展,落实国务院就加快发展第三方检验、检测、认证服务的7项重点任务。
国家机器人检测与评定中心开展的机器人产品检验、检测、认证和公共服务能力建设,将有利于推动机器人产品/部件的准入及认证制度的建立,为国内机器人产业形成技术保障能力,提高进口贸易的技术壁垒,并适当促进机器人产品的出口能力。
国家机器人检测与评定中心的建立将促进机器人产业的研究、开发与应用,为机器人生产企业在产品设计与研发过程中提供试验、研发平台,推进自主研发与创新能力的建设,缩小与国外的技术差距,提升我国机器人研发、技术和产品的整体水平;同时推动机器人行业技术的发展,促进机器人在制造业、运输业、服务业和医疗等行业的应用,直接降低企业的生产成本,为国家可持续发展提供支持。
如何建立国家机器人检测与评定中心
国家机器人检测与评定中心的选址
国家机器人检测与评定中心的选址需要慎重考虑,一般将以下几个方面作为选址因素(见表3)。
建立检测及评价能力
电器类产品通用评价能力
电器类产品通用评价能力对象,包括机器人及关键零部件电磁兼容、机械环境、噪声、气候环境等。
电磁兼容检测及评价能力,覆盖各类机器人的电磁兼容测试能力,包括电焊机器人、装配机器人等、具有几个自由度且配有复杂精密电子设备的机器人等。用于控制机器人的电磁发射和确保工业机器人的电磁抗扰性能。
机械环境检测及评价能力,确定机器人的机械薄弱环节和(或)特性降低情况,论证评价机器人的机械结构完好性和(或)研究他们的动态特性。
噪声检测及评价能力,评价机器人正常工作时产生的噪声是否满足相关技术要求。
气候环境检测及评价能力,评价检测机器人在正常温湿度、气压下使用、运输和贮存时是否保持正常。通过模拟高低温、湿热、紫外光、盐雾、砂尘、降雨等环境气候,验证机器人是否达到预期的技术要求。

表3 国家机器人检测与评定中心选址的参考因素
机器人整机性能和安全检测及评价能力
整机性能和安全检测评价,如机器人末端的测试(速度、力、位置精度等项目)、位(姿)测试、路径测试、轨迹速度、静态柔顺性、互换性、可靠性试验、能效测试、安全测试等。
机器人关键零部件检测及评价能力
机器人关键零部件检测及评价能力,包括电动伺服驱动系统、传感器、控制器、减速器、储能设备等。
机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体,以获得机器人的各种运动的执行机构。对机器人关节驱动的电动机,要求有最大功率质量比和扭矩惯量比、高起动转矩、低惯量和较宽广且平滑的调速范围。特别是像机器人末端执行器(手爪)应采用体积、质量尽可能小的电动机,尤其是要求快速响应时,伺服电动机必须具有较高的可靠性和稳定性,并具有较大的短时过载能力。机器人电动伺服驱动系统检测评价主要包括对速度、转矩等技术指标进行检测、考核。
传感器是机器人必不可少的组成部分,它是检测机器人自身的工作状态,及机器人智能探测外部工作环境和对象状态的核心部件。由于在工业场合中对机器人的控制精度、控制范围、相应灵敏度有诸多限制和要求,而这一切又均依赖于高灵敏度、高精度的各类传感器的实现,所以对机器人上的传感器必须做必要的检测,以满足这些领域的使用需求。
控制器检测及评价能力通过研究机器人人机交互系统和控制系统相关技术,在基于基本性能安全要求的前提下,综合采用相关测试评价方法和手段,形成机器人人机交互系统及控制系统的综合测试评价能力。
关节是机器人的基础部件,其性能好坏直接影响机器人的性能。而在机器人关节中,减速器则是必不可少的部件。由于机器人对定位精度和重复定位精度要求很高,因此,机器人中主要采用RV减速器或谐波减速器两类精密减速器。机器人在工作寿命内,减速器作为传动、承重部件,其磨损是不可避免的,因此,应用于机器人的减速器应具有持久的耐用性。
储能设备是机器人的重要部件。储能设备的安全、可靠是机器人正常工作的前提条件,所以机器人所用储能设备,必须满足一系列检测要求。
推广机器人评价、认证体系
为合力打造行业内统一认可、含金量高、公信度好的认证品牌,需在认证的关键环节(如标准、评估方法和体系、技术规范、实施规则、测试数据一致性、准确性和可追溯性保障措施等方面)形成统一的规范和要求。
评价、认证体系建立步骤如下:
·针对当前已有的机器人相关标准,制定机器人认证实施规则草案。
·针对机器人性能、软件评估等标准空缺部分,组建专家组编制“机器人自主标准/技术规范”,基于这些自主标准设计认证方案,编制认证实施规则并实施对外认证服务。
·针对机器人通讯、风险评估等标准空缺部分,设计有特色的机器人特性认证,如服务机器人人机接触安全及接口、部分机器人的绿色节能/低辐射特性等,组建专家组编制“机器人认证技术规范”,基于这些技术规范设计认证方案并实施对外认证服务。
·健全机器人产品认证体系,开展机器人相关产品的综合认证。