局部阴影下光伏阵列最大功率点跟踪算法的研究*
2015-02-28李正明王学明
李正明,王学明
(江苏大学电气信息工程学院,江苏镇江 212013)
针对上述问题,国内外学者研究了一系列多峰MPPT的方法,文献[5]提出一种基于电导增量法的全局搜索方法,虽然该方法算法简单,但难以跟踪到真正的最大功率点,且输出功率不够稳定。文献[6]采用基于人工神经网络与模糊控制相结合的MPPT算法,能够较好的实现对最大功率点的跟踪,但是需要进行大量复杂的运算,耗时较长,对硬件的要求也比较高。文献[7]采用了一种基于黄金分割数列的MPPT方法,但同样不能保证在任意阴影下都能够对最大功率点进行跟踪。
本文提出一种基于布谷鸟搜索算法的MPPT控制方法,与其他寻优方法相比,CS算法(Cuckoo Search Algorithm)具有更高的搜索速度和全局搜索的能力,提高了收敛的精度和速度,确保在不同光照条件下均能实现最大功率点的跟踪,有效提高了光伏系统的工作效率。
1 光伏阵列的建模
光伏电池等效电路模型的典型形式是单二极管形式,如图1所示[8]。
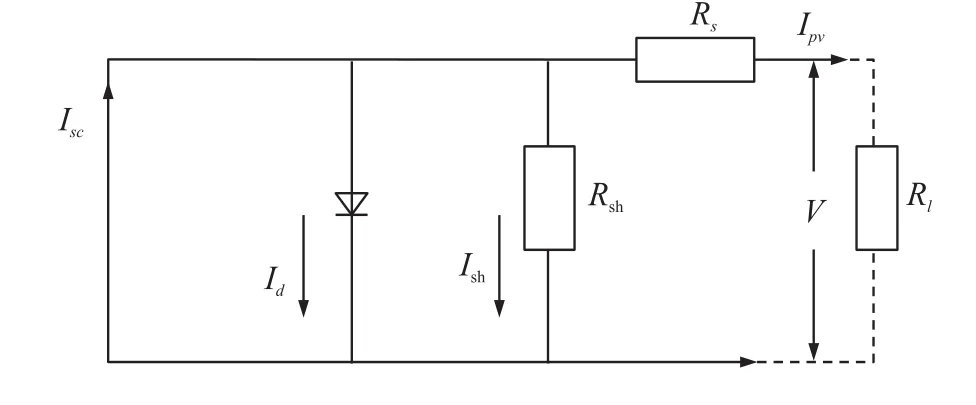
图1 光伏电池等效电路
根据图1所示的光伏电池等效模型,考虑二极管的P-N结的特性方程,可列出光伏电池等效电路的电压及电流特性数学模型

进一步考虑光照强度和温度的影响,短路电流和开路电压可表示如下[9]
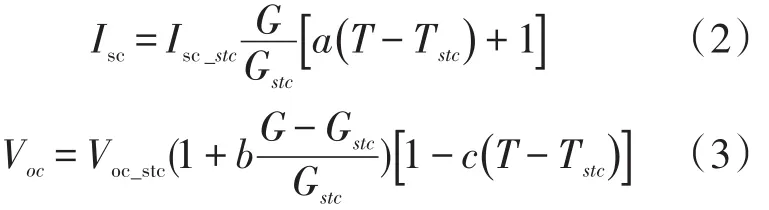
其中,Io为二极管反向饱和电流;q为电子电荷;k为玻尔兹曼常数;A为二极管特性因子;Rs、Rsh分别为等效串联、并联电阻;Isc_stc和Voc_stc分别表示标准测试条件下短路电流和开路电压;Gstc和Tstc分别为1 000 W/m2和25℃。
光伏阵列由若干光伏电池经过合理的串并联组成,图2为典型的Ns×Np光伏阵列,其中Ns为串联支路上光伏电池的数量,Np为并联的串联支路数量。为防止“热斑效应”,通常在光伏电池一侧并联旁路二极管,同时为了避免夜间电流逆流以及阵列中的电位差损坏光伏电池,在串联支路端口接入隔离二极管。
民国初期独立组织机构的公共体育场主要分布在华东地区的部分中心城市,如江苏、安徽、江西、浙江等中心城市以及江苏省部分县。南京政府时期数量增多,如福建、山东、湖北、云南等省立公共体育场也有独立组织机构,江苏、安徽、江西、浙江等省县立公共体育场场长数量增加。抗日战争时期福建、江西、湖北等省立公共体育场组织机构内迁,福建、江西两省各县独立公共体育场增加,专职场长数量增加明显。此外,大后方如云南、四川两省也有一定数量的独立组织机构公共体育场以及专职场长。抗日战争胜利后,独立组织机构数量有一定恢复,但是专职场长多分布在中心城市以及战争影响不大的大后方几个省。
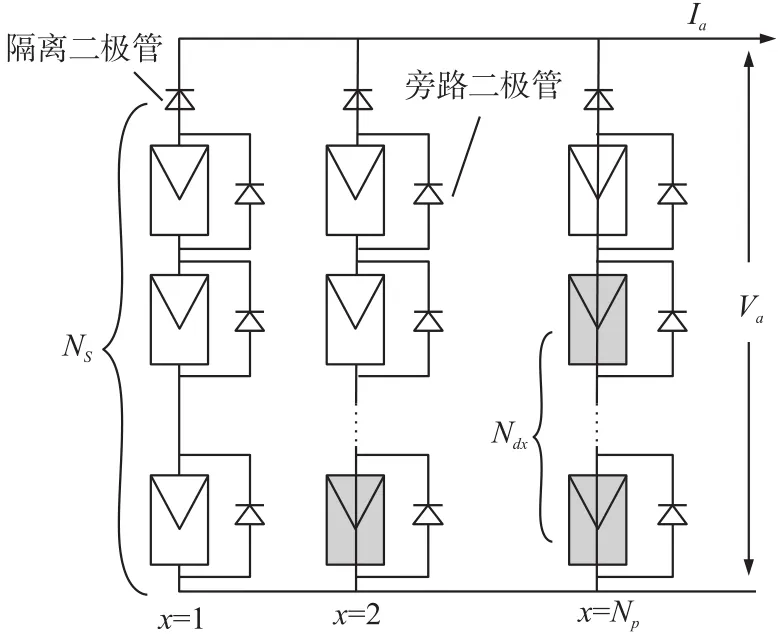
图2 局部阴影下光伏阵列结构图
当光伏阵列工作于局部阴影下时,假设第x个串联支路中有Ndx个光伏电池受到遮挡,忽略旁路二极管的电压降,阵列的输出特性方程可用下式表示:

其中Ia、Va分别为光伏阵列的输出电流和输出电压;Iscx、Vocx和Rsx分别表示第x个串联支路的短路电流、开路电压和等效电阻。
2 CS算法在多峰MPPT中的应用
2.1 CS算法
CS算法是一种新颖的群智能搜索算法,源于对布谷鸟寻巢产卵并让其他鸟类为其孵卵的行为模拟,与其他群智能算法相比,该算法具有算法简单、参数少、易于实现等特点,能够高效的搜索全局最优点。
在自然界中,布谷鸟喜欢把自己的蛋存放于其他鸟类的窝中,冒充寄主的蛋,让寄主为其孵化幼鸟,若弱寄主发现外来蛋就会将其丢弃。布谷鸟寻找适合自己产蛋的鸟窝位置是随机的,为了模拟布谷鸟的寻窝行为,Yang和Des设定了下面3种理想化的规则[10]:
(1)布谷鸟一次只产一颗蛋,并随机选择鸟窝孵化;
(2)在随机选择的鸟窝中,孵化效果最好的鸟窝将会保留到下一代;
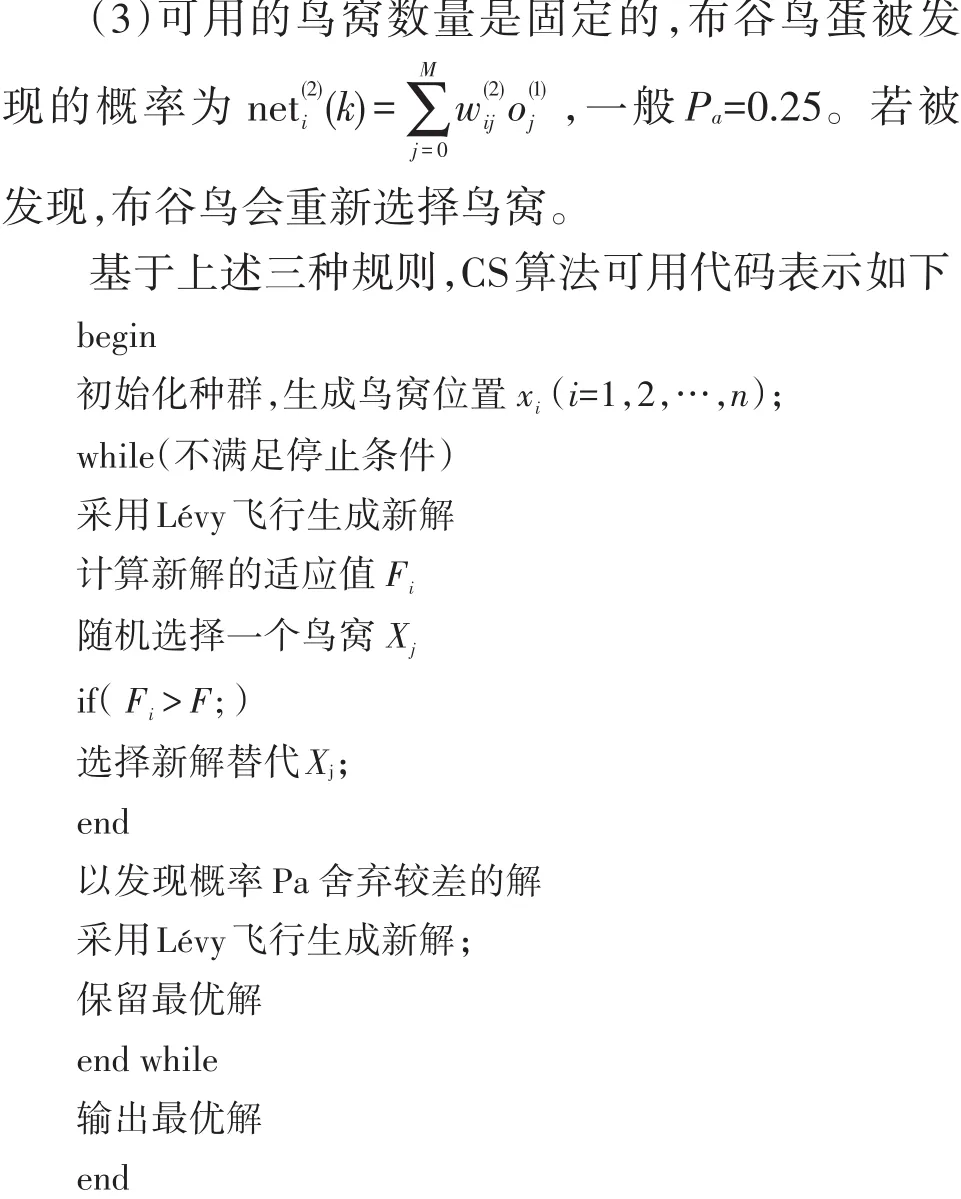
在布谷鸟寻窝过程中,布谷鸟通过不断更新鸟窝位置和比较适应值的大小,放弃适应值较差的鸟窝,来选择最佳鸟窝。鸟窝位置的更新采用Lévy飞行随机步长搜索方式,这是布谷鸟搜索算法不同于其他算法的重要原因。Lévy飞行是随机行走的一种,其步长的分布特点类似于重尾分布,具有短距离行走与偶尔较长距离飞行相结合的特点,保证CS算法能够进行局部及全局的搜索,扩大了搜索范围,更容易跳出局部最优点的束缚。基于上述分析,CS算法利用Lévy飞行更新新解的公式如下
其中,Γ表示伽玛函数。
位置更新后,用均匀分布的随机数r∈[0 ,1]与Pa进行比较,若r>Pa,则舍弃一个较差解,并随机生成一个新解。
2.2 CS算法在多峰MPPT中的应用
在最大功率点跟踪过程中,光伏阵列的电压对应鸟窝的位置,输出功率对应鸟窝的适应值。根据上节内容的分析,本文算法更新电压的公式表示如下

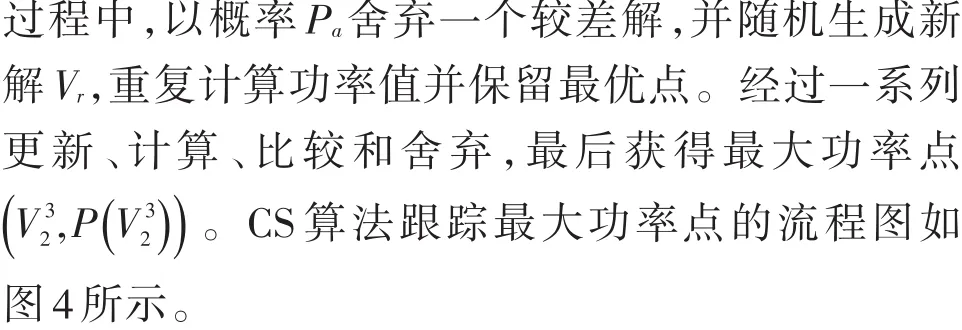

图3 CS算法进行最大功率点搜索的原理图

图4 CS算法流程图
3 仿真与实验分析
3.1 均匀光照下仿真
为验证本文算法的可行性,在MATLAB环境下建立多峰值MPPT跟踪系统进行仿真分析。
以3×3光伏阵列为例,采用的光伏电池标准参数为:Isc=6.7 A,Voc=28 V,Vm=20 V,Im=4.6 A,Pm=92 W。在均匀光照下,光伏阵列P-V曲线呈单峰特性,分别改变光伏阵列的光照强度和温度,观察系统输出功率变化情况,如图5所示。
从图5可以看出,CS算法启动后,经过约0.03 s跟踪到最大功率点,收敛速度较快,稳定后输出功率约为820 W;当光照减弱及温度升高时,CS算法能够迅速响应,重新对最大功率点进行跟踪,表明该算法具有良好的动态性能,并且在跟踪到最大功率点之后,其输出功率波动较小,稳态性能良好。
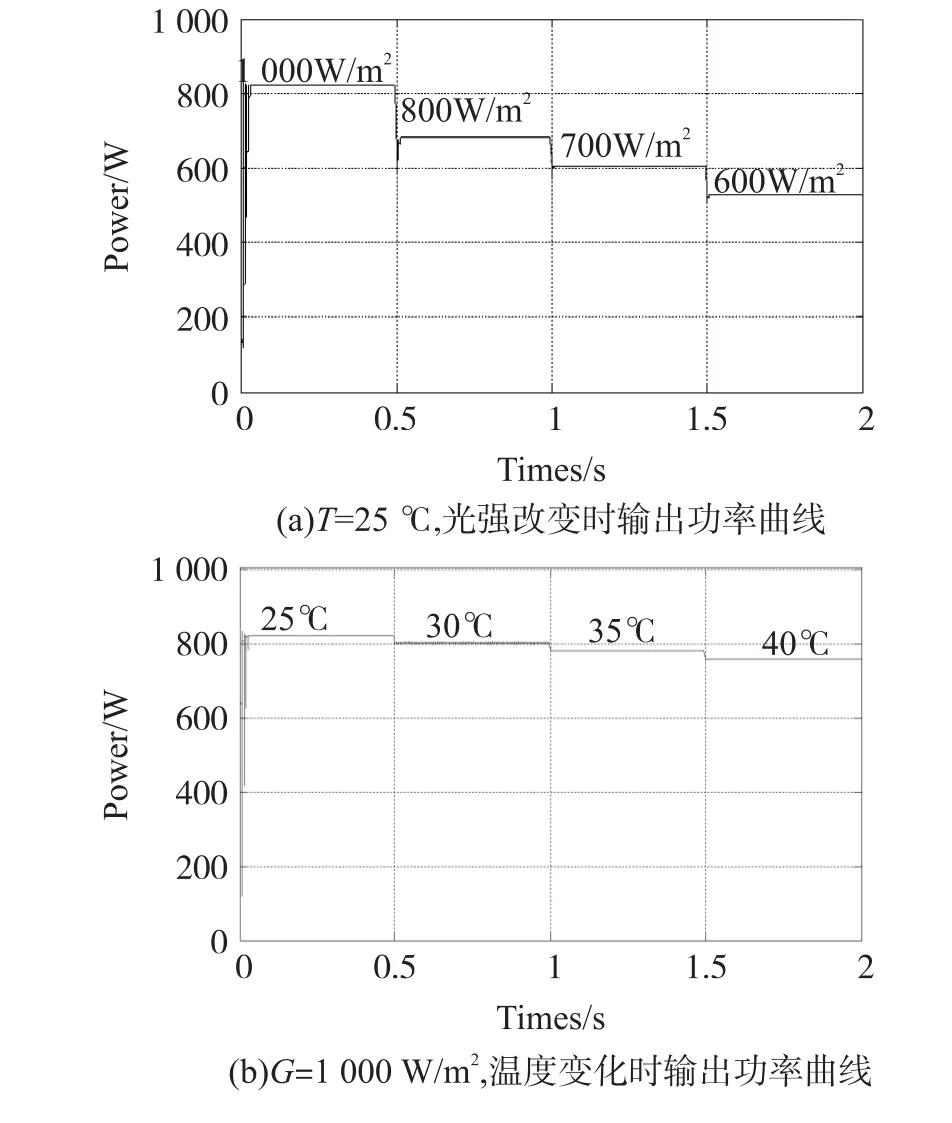
图5 不同环境下光伏阵列输出功率曲线
3.2 局部阴影下仿真
当光伏阵列局部受到遮挡时,传统MPPT算法容易受困于局部最优,造成功率损失,而本文算法则能够克服该问题,完成对全局最大功率点的搜索和跟踪。
假设初始时刻光伏阵列工作于标准测试条件下,0.5s之后阵列局部受到云层遮挡,阵列区域受光照强度分别为1 000 W/m2、600 W/m2及300 W/m2,此时,采用布谷鸟搜索算法和传统扰动观察法P&O(Perturbation andObservation)跟踪到的输出功率曲线如图6所示。
从图6可以观察出,均匀光照下,两种算法均能跟踪到最大功率点,输出功率为820 W,但CS算法的输出功率波动明显小于P&Q,定性优于后者;0.5 s时,阵列局部出现阴影,两种算法迅速响应,0.02 s之后P&Q首先稳定在490 W处,而CS算法经过重新启动和搜索之后,跟踪到的功率为575 W,显然,P&Q由于其自身的局限性,受困于局部最优,而CS算法则能够实现全局最大功率点的搜索和跟踪。
图6 局部阴影条件下CS和P&Q最大功率点跟踪曲线
3.3 实验分析
为进一步验证CS算法的有效性,搭建光伏发电平台,进行实验。光伏阵列开路电压为48 V,额定功率为200 W,负载采用滑动变阻器,利用硬纸板遮挡光伏组件来模拟光照变化情况,将结果进行分析。
实验开始时,光伏阵列受光均匀,待系统稳定后,分别用硬纸板遮挡相同面积的光伏组件,观察两种方法下的输出电压和电流波形,如图7所示。从图中可以观察出,局部阴影出现之后,两种方法均迅速响应,动态性能良好,CS算法重新稳定后输出功率为71.4 W,而P&Q跟踪到的功率仅为55.2 W。显然,CS算法能够跟踪到最大功率点,而扰动观察法受困于局部最优,无法实现最大功率点的跟踪,故在局部阴影下,本文算法具有更好的跟踪性能。
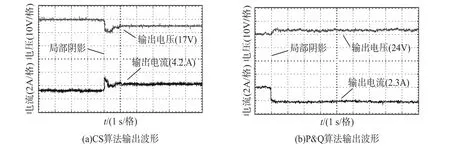
图7 局部阴影下光伏阵列输出波形
4 结论
本文对光伏系统最大功率点的跟踪控制技术进行了研究,针对局部阴影下传统MPPT方法容易陷入局部最优的问题,提出了一种全新的基于布谷鸟搜索算法的MPPT方法。通过仿真和实验表明:
(1)CS算法具有较快的收敛速度,并且在环境发生变化时,该算法能够迅速响应,具有良好的动态性能。
(2)本文算法能够克服局部阴影下传统算法容易陷入局部最优的问题,避免输出功率在最大功率点处的幅值震荡,提高了光伏发电系统的输出效率。
[1]杨帆,彭宏伟,胡为兵,等.太阳能电池最大功率点跟踪技术探讨[J].电子器件,2008,31(4):1081-1084.
[2]朱艳伟,石新春,但扬清.粒子群优化算法在光伏阵列多峰最大功率点跟踪中的应用[J].中国电机工程学报,2012,32(4):42-48.
[3]Amine A M,Mohamed M,Mohamed M.A New Variable Step Size INC MPPT Method for PV Systems[C]//Marrakech:2014 Interna⁃tional Conference on ICMCS,2014:1563-1568.
[4]Kjaer S B.Evaluation of the Hill Climbing and the Incremental Conductance Maximum Power Point Trackers for Photovoltaic Power Syste Systems[J].IEEE Transactions on Enetrgy Conver⁃sion,2012,27(4):922-929.
[5]胡浩磊,杨富文.部分遮阴条件下光伏阵列最大功率点跟踪方法[J].电源学报,2013,(2):23-29.
[6]Syafaruddin,Karatepe E,et al.Artificial Neural Network-polar Co⁃ordinated Fuzzy Controller Based Maximum Power Point Tracking Control under Partially Shaded Conditions[J].IET RENEW⁃ABLE POWER GENERATION,2009,3(2):239-253.
[7]MiyatakeM,Inada T,Hiratsuka I,et al.Control Characteristics of a Fibonacci-Search-Based Maximum Power Point Tracker When a Photovoltaic Array is Partially Shaded[C]//Power Electronics and Motion Control Conference,IEEE,2004:816-821.
[8]戴训江,晁勤.太阳能光伏模块电气特性的数学建模与仿真[J].半导体光电,2009,30(1):47-50+126.
[9]苏建徽,余世杰,赵为,等.硅太阳电池工程用数学模型[J].太阳能学报,2001,22(4):409-412.
[10]Yang X S,Deb S.Engineering Optimization by Cuckoo Search[J].Int’l Journal Math Modeling and Numerical Optimization,2010,1(4):330-343.
[11]Mantegna R N,Stanley H E.Stochastic Process with Ultraslow Convergence to a Gaussian:The Truncated Levy Flight[J].Physi⁃cal Review Letters,1994,73(22):2946-2949.

李正明(1958-),男,汉族,江苏沭阳人,江苏大学电气信息工程学院博士生导师,主要从事新能源、光伏发电的研究;

王学明(1990-),男,汉族,山东德州人,江苏大学电气信息工程学院硕士研究生,主要从事光伏发电的研究。
