基于传声器网络的多机器人协作定位研究
2015-02-28曹张玉
徐 胜 ,杨 卫 ,曹张玉 *
(1.中北大学电子测试技术国家重点实验室,太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原 030051)
多机器人无论在感知能力上还是运动能力上,都拥有单个机器人无法比拟的优势,是当前人工智能和移动机器人研究领域的重要课题之一。其中协作定位技术是多机器人研究的基础问题[1]。协作定位是指多机器人通过协作确定相互位置[2],是动态规划、编队控制、地图构建的前提和基础。
目前多机器人的协作定位多采用GPS、超声波测距、激光测距、机器视觉等,这些定位技术要么对使用环境有较多限制,要么需要外围路标或信标,要么具有较强的方向性[3]。而声定位不具有方向性、时间分辨率高[4],对环境具有一定的适应性,能够较好的完成协作定位。
1 系统硬件平台
多机器人协作定位系统将传声器阵列和声信标放置在移动平台上,组合无线模块构成无线传声器网络,实现多机器人系统在平整路况下的协作定位,并且完成位置和姿态初步调整,即“寻北”功能。
1.1 机器人移动平台
机器人采用轮式移动平台,长42 cm,宽32 cm,四轮驱动。由于协作定位系统采用点声源,遮挡对声音传播有一定影响,故需将声信标及传声器阵列放置在移动平台顶端,并附加声音散射盖保证声音向四周传播。

图1 移动平台示意图
1.2 声信标及传声器
声信标选用惠威M3S扬声器,全频带频率响应,额定功率15 W,灵敏度(2.83 V/1 m)为81 dB。同时考虑环境噪声、声遮挡、信号采样率、环境混响干扰等诸多因素,确定信号频率为1 kHz~2 kHz,脉宽为10 ms~30 ms。将声信标放置在移动平台上,由主控模块搭配功放模块完成发声动作。发声信号如图2所示。
传声器采用驻极体自由场1/2 inch传声器,开路灵敏度为50 mV/Pa,频率响应范围为20 Hz~20 kHz。动态范围(3%失真)大于146 dB。

图2 声信标发声信号
1.3 无线模块
无线模块选用采用EWRF3022UAH系列无线数据传输模块,传输延迟时间小于1 ms,可靠传输距离达到4 000 m;数据接口为TTL电平。
1.4 主控模块
系统选用TMS320C6747高速数字信号处理器作为整个系统的运算和控制核心,主要进行声定位、误差修正、姿态调整及数据传递。主控芯片将采集到的数据进行处理后获得位置信息,通过协作定位算法得出各机器人方位,并控制机器人完成位置姿态调整。
2 协作定位
协作定位是多机器人协作的基础,指机器人利用自身所携带传感器感知自身以及其他机器人的位置和姿态,并能根据位姿信息进行位姿调整。该协作定位系统采用无线传声器网络的声定位作为基础,完成定位及初始位姿调整。
很多学者对创新创业的概念进行了内涵阐释和溯源追踪。目前关于创新创业教育所形成的共识是指学生充分运用其所掌握的知识、技能、信息和机会等资源,以创新的思维实现目标,从而达到培养学生可持续发展素质的目的。但其中仍然存在着很多需要改进的地方,包括高校、社区、企业、学生、教师等在内的各方行动主体对创新创业仍然存在认识不一致、认知不全面的误区和偏差,如认为创新创业仅是为了应对就业压力的权益之举,创新创业仅是社区短期培训或是高校就业创业指导中心的职责,等等。
2.1 声定位
声定位是将传声器在空间布置成一定几何形状的阵列,以接收目标的声场信息。通过计算各传声器拾取信号的时延来确定信标位置。在该系统中采用结构相对简单,数据处理方便的四元平面均匀圆阵[5]。
将传声器均匀放置在移动平台正上方,以平台形心为圆心,以孔径D(D为30 cm)为半径的圆上,并使坐标系Y轴与移动平台直行方向重合。示意图如3所示:(图中虚线方框为移动平台)

图3 四元平面均匀圆阵阵型图及定位示意图
其中 4 个阵元s1、s2、s3、s4为传声器,坐标分别为(D,0),(0,D),(-D,0),(0,-D)。设声信标坐标为(x,y,z),球面坐标为(γ,Ψ,θ),则声信标距原点距离为γ,方位角为Ψ,俯仰角为θ。
假设声信号以球面波的形式传播,到达阵元s1、s2、s3、s4的时间分别为t1、t2、t3、t4,则信标坐标与时间及圆阵孔径D的关系式可推导如下:(c为声速)

由式1可知,要得出信标位置信息,只需要测出t1、t2、t3、t4即可。误差主要来自时延估计误差、测距误差[6-7]。整个声定位过程框图如图4所示。

图4 声定位过程
2.2 机器人的协作定位
多机器人的协作定位是指个体能够感知相互之间位置信息、姿态信息,并能将个体坐标系转换成统一的全局坐标系,即完成坐标的相互转换。坐标变换采用平面四参数法,考虑到全局坐标是以某个个体坐标系为准以及布尔莎模型的适用范围和精度[8],故采用布尔莎模型进行坐标系变换。布尔莎模型是将一个坐标系进行旋转、平移、比例缩放转换成另一个坐标系,如图5将A坐标系作为全局坐标系,据布尔莎模型将坐标系B转换成坐标系A下的坐标有:

其中(XB,YB)指B坐标系下的坐标点B′,XB2A,YB2A指点B′在A坐标系中的坐标,k是比例缩放系数,ΔX、ΔY分别代表每个轴向的坐标平移,α(0°~359.9°)是坐标系B与A的旋转角。
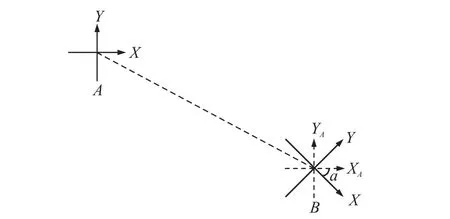
图5 机器人协作定位示意图
机器人A、B相互声定位可得知:(1)机器人B在坐标系A下的坐标(XB-A,YB-A);(2.)机器人A在坐标系B中的(XA-B,YA-B)。由于机器人坐标系的比例尺不存在缩放现象,故比例缩放参数k为0。将两个机器人相互声定位测得的两个坐标代入式(2)可简化成下式:

由式3可求出坐标系B的旋转角∠α,为简化计算,保证信息传递的实时性,将机器人B转角∠α,与坐标系A统一坐标系方向,完成位姿初调以简化坐标变换运算。此时有:

2.3 多机器人协作定位
多机器人协作定位是在A、B机器人完成定位及位姿初调的基础上,通过A机器人依次与其他机器人进行定位及姿态或位置调整,完成多机器人的协作定位。
图6多机器人姿态确定示意图
机器人A、B分别发声,此时机器人C得到A、B的坐标(XA-C,YA-C)(XB-C,YB-C),考虑到式5中A、B坐标系转换关系,有式6:
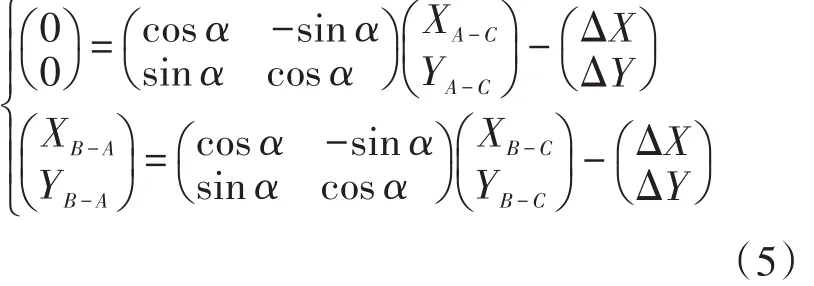
据式(5)可得出坐标系C与A的旋转角∠α以及平移ΔX、ΔY,由此完成机器人C的定位及位姿调整。同理其余机器人的定位也可完成。
多机器人定位精度除了取决于声定位精度外,还与坐标系转换精度、机器人位姿调整中惯性器件以及机械误差有关。
3 实验验证及结果分析
根据以上分析,在主控模块编写了协作定位程序。在不同的环境噪声条件下,在标记好4个机器人最终方位的水泥地面上,进行了多组协作定位验证实验。实验中设定1号机器人为基准机器人(坐标(0,0))直接放置在1号标记中,2号、3号、4号机器人作为从机器人随机摆放。在所有实验结果中挑选了两组具有代表性的实验结果进行分析,实验数据如表1、表2所示。

表1 噪声环境下协作定位实验数据

表2 安静环境下协作定位实验数据
多次实验结果表明安静环境下协作定位效果较好,平均距离偏差0.7 m,方差为0.75,姿态偏差2.5°,方差为0.8;噪声环境下协作定位偏差较大,平均距离偏差1.4 m,方差为1.1,8.2°,方差为1,且表现出一定的方向相关性。
4 结束语
该设计以声定位作为基本原理,实现了多机器人的协作定位。在安静环境下多机器人协作定位效果较好,定位距离较远,距离偏差和角度偏差都较小,有一定的环境适应性,具有较重要的现实意义。
[1]蔡云飞,多机器人协作定位及系统架构研究[D].南京:南京理工大学2011,06
[2]王玲,刘云辉,万建伟等.基于相对方位的多机器人合作定位算法[J].传感技术学报2007,20(4):794-799
[3]周华,多传感器融合技术在移动机器人定位中的应用研究[D].武汉:武汉理工大学2009,6
[4]李磊,叶涛,谭民等.移动机器人技术研究现状与未来[J].机器人,2002,24(5):475-480
[5]刘云武,杨卫.基于传声器阵列的声源定位系统设计[J].压电与声光,2014,36(2):314-316
[6]潘峰,秦丽,孟令军.具有声定位功能的无线传感器网络节点设计[J].计算机工程 2008,34(23):107-109
[7]史小红.基于TDOA的无线定位方法及其性能分析[J].东南大学学报:自然科学版,2013,43(2):252-257
[8]张敬伟.布尔莎模型坐标转换适用范围及精度分析[J].测绘与空间地理信息,2013,36(1):175-182
徐 胜(1989-),男,河北辛集人,硕士研究生,精密仪器及机械专业,主要研究方向为人工智能与智能控制,xush⁃eng4204@sina.com;

曹张玉(1988-),女,山西长治人,硕士研究生,测试计量技术专业,主要研究方向为传感器测试,13653658957@sina.cn。

杨 卫(1957-),男,山西太原人,研高工,主要研究方向为网域化微武器系统,yangwei@nuc.edu.cn;
