特种机器人的发展格局与进程
2015-02-28贾梓筠
□文/贾梓筠
特种机器人的发展格局与进程
□文/贾梓筠
当工业机器人为外界所关注并成为市场主流的时候,特种机器人市场也正悄悄启动。近年来,生产特种机器人的企业数量迅速增加,特种机器人产业已在国外形成,并对社会与生产力的发展发挥了重大的推动作用。
半个多世纪以来,机器人技术的发展可谓日新月异。从医院的诊断治疗到智能轮椅,从家庭清洁到教育、娱乐,从星球探测器到国际空间站维护,从无人驾驶汽车到灾难救援,从用于军事侦查的机器蜜蜂到执行排爆任务等,机器人大军正在向人类生活迈进,像“钢铁侠”、“变形金刚”与“机器管家”也已陆续走出了科幻电影,纷纷问世。随着全球劳动力成本的上升,机器人除了要在工厂里取代人的工作,还将在医疗、服务、交通、太空、军事、海洋探测、生物、农业和娱乐等诸多领域得到广泛应用。
特种机器人产业飞速发展
特种机器人近年来的发展非常迅速,新的机型不断问世,整机性能也不断提高。在机器人产业强国中,美国特种机器人技术创新最为活跃。其在医疗、服务、太空和军事应用的机器人产业发展具有绝对优势,并占有特种机器人市场60%的份额。日前,美国正在致力于将为军队伤病员开发的机器人假肢和小型无人侦察直升机等技术转为民用。2013年3月,美国提出了“机器人发展路线”,并给出了在未来15年美国机器人的五个重点研究领域,其中包括工业、医疗护理、服务、太空和军事应用。此外,日本也提出了类似的机器人研究发展路线,其中包括“新世纪工业机器人”、“服务机器人”和“特种机器人”三个方向。其计划至2020年,实现产业机器人市场规模翻番,扩大至12万亿日元(约合人民币732亿元),主要增量将集中在特种机器人上。其中,护理和医用机器人领域的市场规模也将是现在的20倍。最近欧盟启动全球最大民用机器人研发项目,计划到2020年投入28亿欧元研发用于医疗、护理、家务、农业和运输等领域的机器人。韩国机器人研究与互联网结合,提出了“829”战略计划,其中智能机器人是其提出的九项核心技术之一,把特种机器人技术列为未来国家发展的十大“发动机”产业,并把其作为国家的一个新的经济增长点进行重点发展,对机器人技术给予重点扶持。由此可见,美国、欧洲、日本、韩国等国家和地区都非常重视机器人技术的发展,并将机器人产业作为该国的战略产业。
在整个国际制造业向中国转移的同时,我国正在经历产业结构调整和升级阶段,即由劳动密集型、低成本投入的模式转变为技术密集型、高投入高产出的关键时期。在这一过程中,机器人产业占据着举足轻重的地位。目前,我国已经初步建立起了从机器人应用基础研究到产业化的研发体系。在特种机器人方面,以科沃斯、银星等公司为代表的清洁服务机器人,已经有近百万台走进了百姓家庭。在医疗、助老助残等领域新近研发出的系列机器人样机,也进入了示范应用阶段。
从细分领域看产业格局
2013年美国机器人发展路线图给出了特种机器人在未来15年内的发展方向。特种机器人的研究工作将围绕医疗护理、服务、太空、军事应用展开。这四个方向不仅反映了当前特种机器人的产业格局,同时还覆盖了机器人涉及的几乎全部的前沿技术。
医疗护理机器人
作为一种新兴的医护手段,医用机器人与传统人工技术相比有许多技术优势。目前,医用机器人已在脑神经外科、心脏修复、胆囊摘除手术、人工关节置换、整形外科、泌尿科手术等方面得到了广泛的应用。

UCLA里根医学中心的达芬奇机器人(左)床旁机械臂系统(右)外科医生控制台
外科手术机器人:达芬奇机器人的产生预示着第三代外科手术时代的来临。达芬奇机器人由直觉外科公司(ISRG)设计制造并销售。该系统以美国MIT的机器人外科手术技术为基础,通过使用微创的方法实施复杂的外科手术,改变传统腹腔镜手术的弊端。达芬奇机器人是为外科医生手术操作中的直观控制运动、精细组织操作和三维高清晰度视觉能力而设计的。它能够模仿外科医生的手部动作,用于控制台上的仪器控制,通过微小的切口控制病人体内的微小仪器。医生通过外科手术机器人所提供的灵巧操控、精准定位以及术前规划,可以使患者手术伤口减小、术后迅速恢复正常生活等,进而实现精准性和微创性两大优点。作为全球领先的微创机器人辅助手术机器人公司,ISRG在2013年的经营收益已达到22.65亿美元。截至2014年第一季度,达芬奇机器人累计销售数量为3039台。其中,我国大陆共安装25台,我国台湾地区20台,韩国44台,日本178台。可以看出,达芬奇机器人在我国的普及率和使用率还十分低。
由于达芬奇机器人售价高昂,我国各大研究院所和医院合作也在加紧研制属于中国的手术机器人。其中,清华大学、北京航空航天大学和海军总医院联合开发的“黎元”机器人系统,是国内第一个具有自主控制、视觉定位和远程交互功能的新一代神经微创外科机器人辅助手术系统。目前该机器人已完成研发和临床应用,并通过互联网实现了远程操作。天津大学、南开大学和天津总医院共同开发的“妙手”机器人辅助手术系统,主要针对腹部手术,采用主从控制方式,主操作臂有7个自由度,目前已完成动物试验。此外,国内研发的外科手术机器人还有北京航空航天大学研发的胸腹外科手术机器人、南开大学研发的脊柱外科机器人、第三军医大学研发的脊柱微创外科机器人、天津大学研发的喉部手术机器人等。
康复机器人:作为一种自动化的康复治疗设备,可以帮助患者进行科学有效的康复训练,使患者的运动功能得到更好的恢复。由瑞士一家医疗器械公司与瑞士苏黎世大学医学院康复中心合作推出的洛克马(Lokomat)下肢康复机器人,能对脊髓损伤患者的踏车训练进行自动控制,同时配备有视觉、触觉和听觉反馈模式进行跨越障碍物训练。病人的髋关节和膝关节由计算机控制,并配有相应的位置和压力传感器,根据病人的实际情况自动调节运动参数,实现最佳的康复训练。

洛克马下肢康复机器人
2013年,由上海璟和技创机器人有限公司推出了多体位智能康复训练机器人系统Flexbot。它能准确模拟正常人步态,突破性提供了早期卧床步态训练,包含完整步态周期的闭链运动和开链运动双重运动模式,结合虚拟现实情景互动技术,为患者提供量化、多体位、多种运动模式的步态训练,同时实时提供数据信息反馈。能够有效应用于下肢康复临床训练中,提高下肢步行功能训练的康复效果,并可完全替代和超越国外同类功能的多关节智能化下肢机器人康复系统。

多体位智能康复训练机器人系统Flexbot
随着康复医学的发展和相关技术的进步,基于运动学习理论而发展起来的下肢康复机器人也将深入到康复医学的更多领域,包括在人体的四肢和功能上的重建、职业技能培训和康复治疗等很多层面。
残障辅助机器人:智能轮椅是残障机器人的一种,属于轮式移动型机器人的研究范畴,其主要服务于脊椎受损或行动不便的病人。智能轮椅除了轮椅的基本功能外,它的机械臂还能辅助病人完成喝水、服药、吃饭等动作。世界各国的研究者相继开发了多种智能轮椅平台。最新的研究成果来自美国MIT计算机科学和人工智能实验室(CSAIL)。该轮椅可以在基于导航的情况下完全通过语音控制的方式在空间内移动,跟踪人行走,自动识别使用者的语音命令,依靠无线Wi一Fi系统及各节点产生地图,然后利用地图进行导航。同时,它还配备激光雷达等传感器,用于确保在行进过程中不会撞到人或其他障碍。该开发团队采用了亚马逊的Mechanical Turk平台来帮助轮椅理解使用者说出的语音命令,掌握更多的词汇量。2014年起,该团队开始对轮椅进行升级工作,计划在轮椅上安装机械臂以帮助患者更好地取放物体。

MIT计算机科学和人工智能实验室研制的智能轮椅
近年来,我国也开始逐步将智能康复医疗器材的研发纳入工作日程,为进一步改善残障人士的生活水平做出行动。在智能轮椅的研究方面,由上海交通大学自主机器人实验室研制的“交龙”轮椅表现出众。该智能轮椅可以为试乘游客提供展馆导游服务,能够与游客进行互动交流,当游客提出感兴趣的展品后,能以最短路径方式,引领游客达到展品位置,并通过语音和视频等多媒体形式介绍展品内容。然而,与欧美等发达国家智能轮椅逐步取代普通轮椅的状况来比,我国的智能轮椅市场仍处于早期阶段,部分控制器仍需进口,缺乏智能轮椅生产的核心技术,无法形成智能轮椅的产业规模,产品智能化的程度也较低,故而智能化轮椅产品的价格比较高,不容易被大众所接受。

上海交通大学研制的“交龙”导游机器人
服务机器人
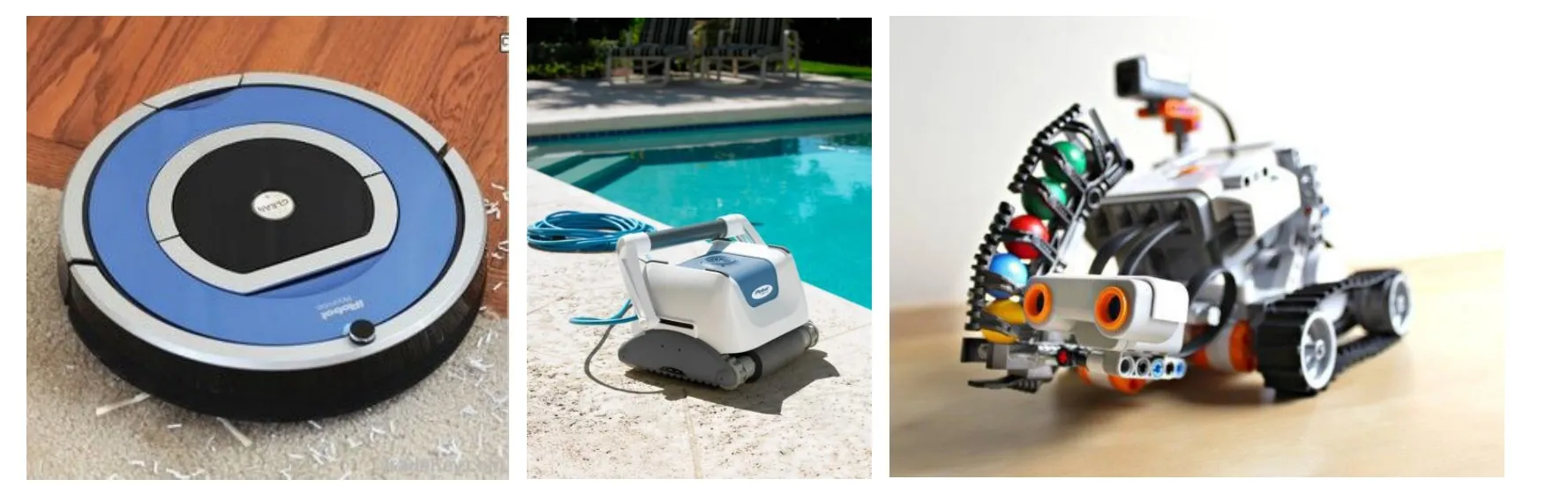
典型服务机器人产品(左)Roomba扫地机器人(中)Verro水池清洁机器人(右)LEGO乐高教育机器人
服务机器人是机器人家族中的一个年轻成员,其定位就是服务。当前世界服务机器人市场化程度仍处于起步阶段,但受简单劳动力不足、人口老龄化等刚性需求驱动,产品研发进展很快。目前,世界上至少有48 个国家在发展机器人产业,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用。在发展处于前列的国家中,西方国家以美国、德国和法国为代表,亚洲以日本和韩国为代表。

PR2机器人应用案例 (左)从冰箱取啤酒(中)摊煎饼(右)打台球
不同于工业机器人,服务机器人通常需要工作在充满人的环境空间中,并且需要与人进行直接的合作。迄今为止,个人服务机器人以家庭型扫地机器人应用最为广泛。龙头企业iRobot在2014年上半年实现营收2.54亿美元,全球市场占有率超过60%,市值约10 亿美元。已有超过600万台的“Robot Roomba”扫地机器人售往世界各地,并以每年60%的市场年增长率增加。
在诸多个人服务机器人中,值得一提的是由美国Willow Garage机器人公司研制的“第二代个人机器人PR2 ”。PR2被誉为全球第一个能够完成一系列综合性操作的智能机器人。与具有单一功能的扫地机器人等相比,可以说PR2具有真正“为人民服务”的能力。如今,PR2已经能够完成自己开门、找到插头给自己充电、叠毛巾、打开冰箱取啤酒、打台球,甚至是做一顿简单的午餐等。PR2对外销售价格为每台40万美元。由于其价格过高且功能还达不到商业应用的要求,所以其主要用于研究。据统计,拥有PR2的研究机构主要分布在欧美日韩等国家和地区。其中以北美高校最为普遍,台湾大学、中国科学院深圳先进技术研究院等也引进了PR2作为机器人的科研平台。
专业服务机器人的发展同样出色。在无人驾驶汽车方面,谷歌推出了世界上第一辆完全无需人工控制的无人驾驶汽车;奥迪在国际消费电子产品展会上展示了其“Audi Quattro Sport Laserlight”概念车,该车采用奥迪zFAS系统,配备有雷达、摄像头、激光扫描仪等进行环境感知;法雷奥的代表在iPhone上演示了如何让其无人驾驶汽车自动泊车的过程,通过12个超声感应器、4个摄像头以及安装在格栅上的一台激光扫描仪实现了自助泊车功能;宝马展示的自助式汽车可以兼容三星Galaxy Gear智能手表和无线蓝牙;在第七届广东工业设计活动上,广汽集团展出的传祺Witstar成为我国首部国产无人驾驶汽车,搭载有智能驾驶系统,拥有由激光雷达、高速CCD相机、红外摄像头等组成的全方位环境感知系统,能够实时采集和处理环境信息、建立车周环境的3D映像从而实现点对点的完全自动驾驶。
然而,无人驾驶技术的实现并不意味着其能马上投入使用。谷歌联合创始人谢尔盖·布林表示,无人驾驶汽车还很初级,谷歌希望它可以尽可能地适应不同的使用场景,只要按一下按钮,就能把用户送到目的地。《麻省理工科技评论》2014年8月发布的一份报告显示,谷歌研发的无人驾驶汽车运行依赖地图和详细的数据,这一前提大大限制了他们的上路范围。报告称,谷歌的无人驾驶汽车无法在99%的美国公路上自动行驶。特别是在我国,由于城市的道路路况和交通都很复杂,全面实现无人驾驶需要城市基础设施、相关法律法规配套等方面进一步完善。
智能公共交通运输系统也是专业服务机器人在交通领域的应用。相比具有特定机械结构的实体机器人系统,智能公共交通运输系统更为抽象、动态特性更为明显,也更容易受到外界的干扰。该系统涉及的热点问题包括:缓解交通拥堵、降低交通事故率、为人们出行提供辅助导航等。目前,公路管理局正在尝试在公路上安装传感器、摄像头、自动收费读卡器等设备来构建“智能道路”,同时研究多种智能算法以实现道路建设的优化、路况实施监测、车辆智能疏导的功能。
其他一些研究和应用都比较成熟的专业服务机器人有无人机、水下机器人、隧道机器人、农业机器人、电网巡检机器人等。其中,国外在无人机的研究方面占有较为明显的优势,在上述其他几个领域国内外的研发实力基本相当。然而,由我国自主研发的机器人所用到的核心部件多数是国外进口,导致研发成本较高,功能可拓展性较低,市场占有率较低。

NASA 发布的机器人宇航员R2工作照
空间/太空机器人
航天界对空间机器人的定义一般是指用于开发太空资源、空间建设和维修、协助空间生产和科学实验、星际探索等方面的带有一定智能的各种机械手、探测车等应用设备。空间机器人所从事的工作主要涉及空间站的建设,航天器的维护和修理,空间生产和科学实验与星球探测等。
在空间机器人中,智能程度最高的属自主型机器人。其最新成果之一来自于美国国家宇航局(NASA)与通用汽车公司、海洋工程离岸油田机器人公司联合研制的人形机器人助手Robonaut 2号(R2)。R2是全球首位机器人宇航员,它的外皮材料具有屏蔽功能,能够减少空间站设备和宇宙射线对它的电磁干扰。从2011年起,R2被放置于国际空间站上,用于协助宇航员完成清扫和日常维护等工作。2013年底,NASA工程师们成功地为R2进行了升级工作,不仅包括更换新的处理器、风扇和软件升级,还在R2上安装了可以灵活弯曲运动的下肢。据NASA发布的消息,R2的双腿可以用于辅助机器人在无重力环境下进行行走和攀爬运动,并使其一条腿的跨度可达9英尺长。据美国国家宇航局称,R2的双腿研发消耗了6百万美元,后期的系统搭建与测试消耗了8百万美元。NASA表示,R2的上身部分也需要进行升级以适应舱外的真空环境,其电力系统需要改造成可携带电池组工作或依靠太阳能工作。

Kirobo在国际空间站留影

“神舟十号”与“天宫一号”自动对接计算机演示图
日本在空间机器人的研究成果打破了国际空间站的静寂。2013年8月4日,日本将世界首个会说话的机器人Kirobo送上太空,其不仅可以完成多种肢体动作,还可以用日语同宇航员进行交流,帮助其工作,记录对话内容,并能从控制室向宇航员传递信息等。来自丰田汽车公司的语言处理技术能让Kirobo以一种合成的声音讲话,其头部的摄像机装有面部识别软件。
我国空间机器人的研究成果主要集中在空间站的建立与宇宙飞船等方面。在空间站的研究上,由中国空间技术研究院和上海航天技术研究院研制的“天宫一号”是我国首个目标飞行器和空间实验室。“天宫一号”的发射标志着我国已掌握空间交会对接技术及建立空间实验室的技术,同时也意味着中国已经拥有建立初步空间站,即短期无人照料的空间站的能力。在载人宇宙飞船的研究上,我国已达到或优于国际第三代载人飞船技术。神舟飞船是中国自行研制、具有完全自主知识产权的飞船。与国外第三代飞船相比,具有起点高、具备留轨利用能力等特点。2013年6月13日,“神舟十号”飞船与“天宫一号”顺利完成了自动交会对接,航天员对天宫一号的地板和密封圈进行了更换,同时实施飞船绕飞实验,为空间站的建造储备技术奠定基础。2014年2月,“天宫一号”天地通信系统完成两次远程控制,使其轨道高度得到提升,完成了第一次轨道维持工作。中国载人航天工程总设计师周建平在北京表示,中国将在2015年底前后发射真正的空间实验室“天宫二号”,目标是建成我国正式的空间实验室大系统。“天宫二号”任务期间,中国将发射载人飞船和货运飞船。

着陆器和月球车互拍回传照片(左)“嫦娥三号”着陆器(右)“玉兔号”月球车
在探索空间机器人的应用中,虽然我国的研究起步比较晚,但是发展速度较快。2013年7月20日,我国在太原卫星发射中心用长征四号丙运载火箭,以“一箭三星”方式,成功将“创新三号”、“试验七号”和“实践十五号”三颗技术科学试验卫星发射升空,卫星顺利进入预定轨道。三颗卫星主要用于开展空间碎片观测、空间机械臂操作等空间维护技术科学试验。2013年12月2日,我国从西昌发射升空的“嫦娥三号”着陆器和“玉兔号”月球车是我国首次开展的月面软着陆巡视探测行动。“玉兔号”是我国自主研发的首辆无人驾驶月球车,其主要工作模式分为行走、探测和通信三类。其采用摇臂悬架构型,轮式行走装置,独立驱动;采用立体视觉完成周围环境识别;根据环境信息,实现安全路径规划;利用机械臂辅助仪器实现就位探测;利用测月雷达探测土壤厚度和分层等信息。
2014年4月,我国载人月球车在重庆第七届国际军博会上首次亮相。该载人月球车由27所985重点高校组成的教育部深空探测联合研究中心研发,整车可折叠,可携带多种设备,最多承载两人,重庆大学承担了主要的研发工作。设计师詹涵菁表示,目前该月球车还只是一个雏形,已经完成了结构和力学设计,接下来还有真空实验和热控实验等一系列研发过程,预计在2015年年底完成概念性预研发。
军用机器人
军用机器人的研制涉及到国家军事安全,属于军用设备的高端产品。同时,军用机器人集各领域最先进的技术与经验于一身,代表着机器人技术研究的最高水准。
近10年来,军用机器人已成为国家军事安全的重点发展战略。各国都非常重视军用机器人的发展并投入巨额资金用于研制更先进的军用装备。以美军为例,其“未来战斗系统”的研究经费预计为250亿美元。如果美国陆军全部装备“未来战斗系统”,则将耗资13000亿美元。然而从美国国防部的角度看,用武装机器人代替士兵服役打仗,实现军队的机器人化,是少花钱、低风险、高效率实施未来战争的最佳途径。因为如果把合同役士兵的薪资、培训费用、退休金、福利以及伤亡补贴等全部计算在内,使用机器人士兵的成本甚至会更低。因此,即使在使用机器人从事军事活动的问题上存在着激烈的社会争议,但研制军用机器人的进程并未中断,反而有加速的趋势,可见机器人在未来军事领域将要扮演重要角色。

美国海军陆战队对LS3的现场测试
在军用机器人研究中,美国无论是在基础技术、系统开发、生产配套方面,还是在技术转化和实战应用经验上都处于绝对领先地位。美国军用机器人开发与应用涵盖了陆、海、空、天等各个兵种,是世界上唯一具有综合开发、试验和实战应用能力的国家。目前,美军已经装配了超过7500架无人机和1.5万个地面机器人,用于侦察监视、替代士兵站岗放哨、排雷除爆等任务。美国国会曾批准2015年美军作战平台中无人作战系统的比例达1/3的方案。为提升海陆空军事系统的实力,美国国防部现正在研制基于先进机器人技术的集成作战系统,其主要分成四类:
[1]
摩尔定律
由英特尔创始人之一戈登·摩尔提出。他指出,当价格不变时,集成电路上可容纳的晶体管数目每隔18个月便会增加一倍,性能也将提升一倍。
(1)用于监视、勘察导弹的无人驾驶飞行器;
(2)用于深入士兵无法进入的危险领域获取信息的小型无人地面车辆;
(3)用于补充作战物资的多功能后勤保障机器人;
(4)用于运输复杂侦查设备的武装机器人战车。
美国波士顿动力公司(Boston Dynamics)是全球闻名的机器人工程技术厂商,在四足全地形机器人方面尤其富有经验。在波士顿动力研制的多款创新型机器人中,“大狗BigDog”机器人最为典型。该项目由DARPA资助,希望大狗能在军车难以出入的险要地带助士兵一臂之力。大狗的升级版“阿尔法狗(Alpha Dog)”,官方称之为有腿小队支援系统(Legged Squad Support System,简称LS3),目前部署在夏威夷的卡胡库训练区,由海军陆战队士兵对其测试。LS3能够搭载400磅重物连续行走20英里,并在树林、岩石地、障碍物和城区等复杂地形中跟随士兵行动。此外,LS3可以自主地沿着简单路线行进,也可以通过手持设备对其进行遥控操作。
军用机器人的产业强国包括美、德、英、法、意、以、日、韩等国家,这些国家不仅在技术上处于研究的前列,其产品已经在军事上有了实际运用。我国与这些强国的技术差距明显,但在政策大力支持的情况下,军事机器人的相关企业发展前景明显良好,有望成为企业未来强劲的收入保证。
未来发展的新难题
从全球范围看,科技发展的速度越来越快,无论是机器人硬件设备更新换代的速度,还是机器人的软件控制系统的升级速度,都已逐渐打破了摩尔定律[1]。
作为高新技术的集大成者,特种机器人的发展势必会加速新一轮科技革命的到来。因此,面向非制造业的特种机器人的研究、开发、应用将成为未来机器人产业发展的一个重要方向。其中,特种机器人则会在军事,医疗护理,太空探索与个人/专业服务等领域扮演重要角色。随着相互学习与共享知识云技术获得重大突破,小型家庭用辅助机器人的成本大幅度降低,有望在20年内形成过百亿美元的新兴市场,而残障辅助机器人的规模也会在未来20年内加速扩大。
核心技术方面,特种机器人未来研发的重大难点之一将是人、自然环境以及机器人的共生问题。基于此的机器人功能也会得到进一步细化。例如,高灵巧度操作,安全控制策略,独立供电系统,低排放执行器,真实世界的三维规划与导航,协同工作,人机交互,物联网与云计算,柔性机构驱动设计,运动/感知/控制仿生,复杂环境下机器人学的动力学控制,故障远程诊断与修复技术等等。此外,以大数据、云计算、移动互联网为代表的新一代信息技术与机器人技术的融合创新加速,将不仅有助开发出更具自主学习能力和自主解决问题能力的新型智能机器人,还可为机器人建立起相应的互联网和知识库的“云空间”, 使其通过互联网进行交互,并通过云计算提升机器人的智能化水平。因此,机器人产业发展的大趋势将围绕网络化、数字化、集成化、智能化、绿色化方向展开。
如何打破国外垄断格局
我国工业化起步晚是导致与发达国家机器人和智能装备产业差距的主要原因。由于高素质专业技术人才严重稀缺,自主创新能力严重不足,尤其是在原创性方面,我国国产机器人生产规模不大,整体智能化水平较低,国产器件质量达不到国际标准,整体性能偏低,机器人故障率过高,可靠性较差。国内机器人企业至少落后美国20年以上,在一些关键部件的研发生产上差距甚至达到50年。比如,扮演机器人“大脑”角色的中央处理器CPU是机器人智能化的必要条件与保障。而如今,中国还没有能力独立研发高性能的CPU模块。此外,诸如传感器等元器件、减速器、伺服电机、信息处理技术等核心软硬件技术,也还在依赖进口,造成国产机器人成本居高不下,严重制约了机器人产业的成熟及国际竞争力的形成。
为了解决我国核心技术能力不足的“内忧”和因外资来袭导致国产自主品牌生产企业发展受阻的“外患”,我国有必要从系统性、协调性和制造技术等方面缩小差距。突破机器人新材料、3D环境识别、导航规划、灵巧操作等前沿技术。突破应用工艺、核心部件及可靠性集成平台等产业技术。并坚持以工业规模化、服务嵌入化为原则,形成机器人研制、生产、制造、销售、集成、服务等有序而细化的产业链。由于机器人本体在中国不能大规模国产化,目前我国可以借鉴美国在系统集成方面的行业经验,采取美国模式,进而快速产生经济效益。但面临的问题是,做系统集成的企业会受到资金压力而导致规模扩张被限制。在真正突破机器人本体技术后,我国的产业发展模式还可融合日本的产业链分工模式。与此同时,重点培育具有国际竞争力的本土机器人龙头企业以及配套的产业集群,开拓属于中国特有的特种机器人市场,建立规模化的国产品牌示范区等,也将有助于打破国外对特种机器人产业的垄断格局。
贾梓筠 北京交通大学 博士研究生
曾作为国家公派留学生在美国麻省理工学院机器人实验室访学一年
