基于前向搜索的GNSS长距多径信号判别技术
2015-02-27石荣邓科
石荣,邓科
(电子信息控制重点实验室,四川成都610036)
基于前向搜索的GNSS长距多径信号判别技术
石荣,邓科
(电子信息控制重点实验室,四川成都610036)
卫星导航接收机中的多径信号,尤其是长距多径信号会造成伪码的错误捕获与跟踪,带来很大的伪距测量误差,甚至定位失效。针对这一问题,利用卫星导航系统中独有的直达信号相对于多径信号具有最超前码相位的特性,在导航信号捕获跟踪之后,继续通过相关峰前向搜索的方法来判别直达信号与多径信号,在剔除多径分量之后获得准确的伪距测量值。在此基础上讨论了长距多径信号的搜索区间,给出了新的接收机处理架构,从而为卫星导航中长距多径信号的去除与精确定位的实施提供了重要参考。
长距多径信号;最超前码相位;前向搜索;多径信号判别;全球卫星导航系统
0 引言
卫星导航接收机除了收到来至导航卫星发射的直达信号之外,还会接收到由地面、海面、大型建筑物以及其他障碍物导致的反射、衍射和散射而产生的来自不同方向的多径信号。根据多径信号时延的长短,可将其分为长距多径信号和短距多径信号两大类,如果多径信号相对于直达信号之间的时延比较大,则称之为长距多径信号;否则称之为短距多径信号。在地面和海面导航应用中,由于环境中的反射体一般距离接收机较近,所以以短距多径信号为主。但是在航空导航应用中,飞行器上的导航接收机除了会收到机体反射所产生的短距多径信号之外,还可能接收到来自平整地面或海面的反射信号,由于飞行器具有一定的飞行高度,所以这一经过反射传播的导航信号就属于典型的长距多径信号。
众所周知,现代卫星导航系统,如GPS,GLONASS,Galileo,BD等,实施导航定位的基础都是测量接收机到每一颗导航卫星的直线伪距,然后以每一颗导航卫星的当前位置作为基准点,通过定位方程来解算出接收机所在位置处的坐标。如果导航接收机捕获跟踪到的信号是直达信号的多径分量,显然测量得到的伪距中就包含了额外的传播距离。对于短距多径信号来说,与直达信号之间的时延在一个或几个扩频码片周期范围,所以会造成伪距测量中相关峰位置发生偏移,形成伪距测量误差,大小在几米至几百米范围,这显然会增大最终的定位误差[1⁃3]。但是对于长径多径信号来说,相关峰位置误差会高达几十个甚至上千个扩频码片的传播距离,所造成的伪距测量误差从几千米至几十千米,在某些特殊条件下,伪距测量误差甚至高达上百千米,从而造成定位解算的完全失效。
目前大量的文献对导航信号接收中的短距多径效应进行了研究,提出了各种针对短距多径信号的抑制与处理方法[4⁃7],但是对长距多径信号的判别与去除问题则没有专门的分析。而本文重点针对导航信号接收中的长距多径效应展开研究,阐述了长距多径信号的判别原理,讨论了长距多径信号的搜索区间范围与去除方法,并对采取上述技术手段之后所带来的导航接收机架构上的变化进行了分析,从而为该技术的实际工程应用奠定了基础。
1 长距多径信号的判别原理
不失一般性,采用复基带信号形式进行讨论。记接收机收到的直达信号为SX(t),收到的M条多径信号为:γi⋅SX(t-τi),i=1,2,…,M,其中τi表示第i条多径传播路径相对于直达信号产生的时延;γi为复数,表示第i个多径传播分量相对于直达信号的相对强度与附加相位值。于是接收机最终接收到的信号S(t)可表示成如下形式:

实际上卫星导航定位中的多径效应与移动通信中的多径效应是有区别的。在移动通信的接收过程中,如果基站与移动台之间存在视距传播条件时,直达信号是存在的;如果基站与移动台之间没有视距条件,不可直视,此时就没有直达信号,所有的信号都是经过反射、衍射或散射之后才接收到的。在此条件下只要其中一条路径的信号强度满足门限要求,无线通信链路仍然是可以建立的。这一强度最大的信号分量一般称为主信号,而其他的信号分量则被称为多径分量。显然,在移动通信的非视距传播条件下,多径分量在时间上既可以滞后于主信号分量,也可以超前于主信号分量。
但是在卫星导航定位应用中,根据定位基本原理,伪距测量是以电磁波直线传播为前提条件的,这就意味着精确定位的实施一定要求导航接收机与导航卫星之间存在视距。所以在此条件下,卫星导航接收中的多径信号相对于直达信号来说,都不可能超前于直达信号,都具有正的时间延迟。即在式(1)中有下式成立:

按照直接序列扩频信号的伪码相关接收方法,对信号S(t)进行扩频码相关运算时,一共会得到M+1个相关峰,按照时间顺序排列,第1个相关峰一定是直达信号对应的相关峰,而后续的M个相关峰对应于多径信号的相关峰,这些相关峰的时间间隔就是多径时延τi。
由式(2)可知,在卫星导航应用中直达信号相对于其他多径信号来说,具有在时间上的最超前性,即在伪码相关运算中,直达信号将具有最超前的码相位。这一特性是卫星导航应用中判别直达信号与多径信号的重要准则。按照此准则,每当接收机对一颗导航卫星发射的信号完成捕获与跟踪之后,在伪距测量之前,还需要增加一个操作步骤,就是判别当前正在跟踪的这一信号是直达信号还是多径信号,只有在确认该信号是来自该导航卫星的直达信号时,才能实施伪距测量和定位解算,否则将有可能把长距多径信号作为正常信号来捕获与跟踪,从而带来很大的伪距测量误差,甚至得到一个错误的定位结果。
2 长距多径信号的搜索区间
如前所述,卫星导航中长距多径信号相对于直达信号来说,在时间上一定是滞后的,但是滞后的时间长度不会是无限大。因为在未受到外界干扰的情况下,长距多径信号大多是由导航接收机所处环境中的反射传播效应所造成的[3]。在近地空间的导航应用中,多径长度与直达路径长度之间的最大差值出现在如图1所示的航空导航应用场景中。
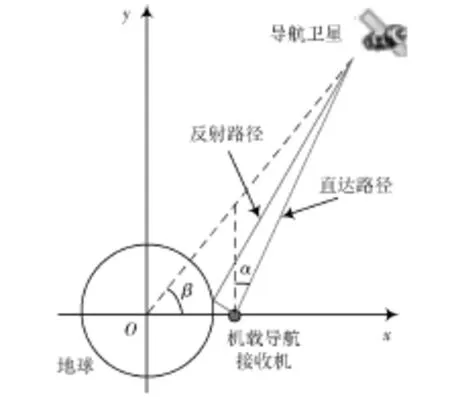
图1 多径与直达路径分析场景示意图
图1中机载导航接收机接收导航卫星发射的导航信号主要有两条路径:一条为直达路径;另一条为经过地球表面反射之后的路径。在地球球心、接收机和该颗导航卫星三点所决定的平面内,以地球球心为坐标原点,以球心至接收机方向为x轴正向,建立如图1所示的坐标系。设导航卫星的坐标为(xS,yS),接收机的坐标为(xr,0),接收机相对于卫星的相对仰角为α,导航卫星、地心与接收机之间形成的夹角为β,导航卫星相对于地面的轨道高度为hS,典型的导航卫星如GPS卫星的轨道高度为20 200 km,地球半径R为6 400 km,实际应用中航空器上的导航接收机距离地面的高度为hr,在近地空间中应用的航空器的最大飞行高度一般在20 km以内。于是有如下关系式成立:
且由下式可以求出在不同仰角α条件下,直达路径长度Ld:

只要在图1中求得电磁波在地球表面的反射点坐标(xf,yf),那么反射路径的长度Lm就可以表示为:

根据电磁波发生反射的条件,反射点坐标(xf,yf)满足如下两式:

式中atan∙()表示反正切函数。由式(9),式(10)可以求解出反射点坐标(xf,yf),代入式(8)可求解出反射传播路径长度Lm。
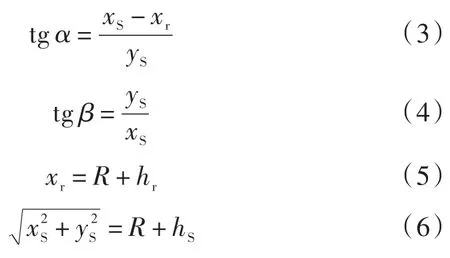
综合上述各式可以计算出当接收仰角α从0°变化到90°时,接收机高度hr取不同值的情况下,反射路径和直达路径的长度之差ΔL=Lm-Ld,如图2所示。
图2 不同高度下路径差随仰角变化曲线图
图2中的4条曲线从下往上分别代表导航接收机距离地面的高度hr分别为:1 km,5 km,10,20 km,由此可见随着高度的增加,反射路径和直达路径的长度之差越大。最大路径差出现在接收机高度为20 km,仰角为90°时,此时的路径差值为40 km。
由此可知,在近地空间的航空导航应用中,多径信号相对于直达信号来说,所多出来的最大传播距离为40 km,对应的最大传播时延约为133 μs。这一数据就决定了导航接收机在捕获跟踪到一颗导航卫星的信号之后,该卫星直达信号的伪码相位一定位于当前信号时刻至更早的133 μs这一区间所决定的范围内。如果在这一搜索区间范围内没有发现其他的与这颗导航卫星有关的信号相关峰存在,则可以判断当前所捕获跟踪到的信号一定是这颗导航卫星的直达信号。反之,如果在这一搜索区间范围内还发现有多个与这颗导航卫星有关的信号相关峰存在,则将最超前的一个相关峰对应的信号作为新的捕获与跟踪信号,然后再重复上述过程,直到判别出该导航卫星的直达信号为止。获得直达信号之后便可以进行后续的伪距测量与定位解算,从而得到导航接收机所在的位置坐标。
3 新的导航接收机处理架构
由于在目前的导航接收机设计中,对于同一颗导航卫星的信号接收只分配一个相关接收通道,由该通道进行信号的捕获与跟踪。如果该接收通道捕获并跟踪到的是该导航卫星的直达信号,则可以获得其正确的伪距测量值;但是如果该接收通道捕获并跟踪到的是该导航卫星的一个长距多径信号,那么其伪距测量值就会一直含有很大的测量误差。所以要实现本文前面所提出的基于前向搜索的长距多径信号判别,就需要对当前接收机的架构进行改进,单独使用一个接收通道作为长距多径信号判别之用,如图3所示。这一改进并不会造成传统导航接收机硬件架构的较大变化,只是在处理流程与软件控制上做了调整。

图3 新的导航接收机处理架构框图
图3中的导航信号经过放大变频至中频之后进行数字化采样,中频采样信号送入各个正常接收通道进行PN码的捕获与跟踪踪。最右边一个判别通道的硬件结构仍然与其他通道一样,但它轮循与其他正常接收通道配对使用。在与正常接收通道配对期间,正常接收通道已经捕获并跟踪上一颗导航卫星的信号,判别通道就在此基础上,相对于该正常接收通道在超前133 μs的时间范围所决定的伪码相位区间内,搜索是否有与该导航卫星信号有关的其他相关峰存在。如果存在,则可以判断该正常接收通道当前跟踪的信号仅仅是一个长距多径信号,则需要立即提前码相位,转移到判别通道新搜索出的相关峰位置所在处,进行新的捕获与跟踪。如果在搜索区间内不存在新的相关峰,则可以判断当前该正常接收通道中的信号是对应该导航卫星的直达信号,可以进行后续的导航电文解调、伪距测量与定位解算。然后长距多径信号判别接收通道再与下一个正常接收通道进行配对,重复上述工作过程。长距多径信号判别接收通道一直在上述过程中不断轮循。以确保所有的正常接收通道中所捕获跟踪的信号全部为直达信号。
在这一新的接收机处理架构中,长距多径信号的搜索及相关运算同正常信号捕获时的搜索及相关运算在硬件处理上是一致的,所以只使用了一个相关接收通道进行轮循处理,就完成了所有接收通道的长距多径信号的判别工作,占用的硬件资源少,而且不需要更改当前已有接收机的硬件结构,只需要对软件进行更新升级,加入新的控制处理流程即可。由于目前常用的导航接收机中相关接收通道的数量一般在8~12个左右,而卫星导航定位的实施至少需要4颗卫星,而比较常见的情况是采用6~7颗仰角条件较好的卫星来实施定位,所以利用目前导航接收机中一个接收通道来进行长距多径信号的判别是实际可行的。
4 结语
本文针对卫星导航信号接收中的长距多径效应问题进行了深入的分析,给出了长距多径信号的判别方法,即通过前向搜索来获得最超前到达的直达信号分量,从而获得正确的伪距测量值。在此基础上分析了在实际应用中,通常情况下长距多径信号的搜索范围,讨论了相关的信号处理方法与工作流程,以及本方法在实现过程中对导航接收机架构上的改进,并指出在保持现有接收机硬件架构基本不变的情况下,通过改变软件与控制流程即可实现基于前向搜索的长距多径信号的判别与去除。从而为该方法的实际应用奠定了良好的基础。
另一方面,长距多径信号判别技术还可以扩展应用于“抗转发欺骗干扰”的卫星导航系统中。因为被转发的导航卫星信号相对于真实直达信号来说在时间上也是滞后的[8],所以在导航接收机中,被转发的这一个信号实际上就等效于一个长距多径信号。利用本文所提出的方法可以辨识出当前接收机所接收到的信号是一个导航卫星发射的直达信号,还是一个被转发过的导航欺骗信号,这样就可以在卫星导航接收机中剔除“转发欺骗干扰信号”,从而最终使得导航接收机采用真实信号来获得准确的定位结果,所以本方法也可以极大地提高卫星导航系统的抗转发欺骗干扰的能力。
[1]MISRA Pratap,ENGE Per.Global positioning system signals,measurements,and performance[M].Massachusetts,USA:Ganga⁃Jamuna Press,2006.
[2]KAPLAN E D,HEGARTY C J.Understanding GPS principles and applications[M].2nd ed.MA,USA:Artech House,Inc,2006.
[3]杨东凯,张其善.GNSS反射信号处理基础与实践[M].北京:电子工业出版社,2012.
[4]王尔申,张淑芳,张芝贤.GPS接收机抗多径技术研究现状与趋势[J].电讯技术,2011,51(1):114⁃119.
[5]范建军,雍少为,王飞雪.基于卡尔曼滤波的多径误差消除及双频模糊度快速估计方法研究[J].电子与信息学报,2008,30(5):1075⁃1079.
[6]孙晓文,张淑芳,胡青,等.一种基于改进的Rake模型的GNSS接收机抗多径新技术[J].电子学报,2011,29(10):2422⁃2426.
[7]沈锋,盖猛,贺瑞.一种基于小波变换的伪码跟踪环路多径抑制方法[J].宇航学报,2012,33(11):1667⁃1673.
[8]石荣,易翔,王文松,等.时延伪GPS卫星干扰的定位控制原理分析[J].电子对抗,2007(2):21⁃25.
Long distance multipath signal discrimination technique in GNSS based on forward searching
SHI Rong,DENG Ke
(Key Laboratory for Electronic Information Control,Chengdu 610036,China)
The multipath signals coming into GNSS(global navigation satellite system),especially the long⁃distance mul⁃tipath signals,may result in wrong capture and tracking for PN(pseudo noise)of the navigation signal,which may bring about the large pseudo⁃distance detection error,or even location invalidation.The direct path signal relative to multipath one can be discriminated on the basis of characteristic of most leading PN code phase in more direct path of the GNSS than that of the mul⁃tipath.After the normal capture and tracking procedure,the forward searching for the leading element continues for the new cor⁃relation⁃peak.If there is a new one,the more accurate pseudo⁃distance can be gotten by eliminating the long distance multipath signal.The searching interval for this signal is discussed and the new architecture for the receiver is designed.It is the new refe⁃rence for long distance multipath signal elimination and precise location in GNSS.
long distance multipath signal;most leading PN code phase;forward searching;multipath signal discrimina⁃tion;GNSS
TN967.1⁃34
A
1004⁃373X(2015)05⁃0159⁃04
石荣(1974—),男,四川人,博士。研究方向为电子对抗、通信与导航系统。
邓科(1990—),男,四川人,硕士生。研究方向为信号分析与处理
2014⁃10⁃05
