控制力矩陀螺柔性安装界面扰动力分析方法
2015-02-27高行素罗文波刘国青梁东平孙维关新
高行素罗文波刘国青梁东平孙维关新
(1北京空间飞行器总体设计部,北京 100094)
(2北京控制工程研究所,北京 100090)
控制力矩陀螺柔性安装界面扰动力分析方法
高行素1罗文波1刘国青1梁东平1孙维1关新2
(1北京空间飞行器总体设计部,北京 100094)
(2北京控制工程研究所,北京 100090)
以控制力矩陀螺(Control Moment Gyroscope,CMG)-柔性基础结构耦合系统为研究对象,提出了使用CMG解析动态加速性和柔性基础结构解析加速性对固定界面扰动力进行修正,以获取柔性界面扰动力的分析方法,并将分析结果与Simulink动力学建模与仿真的结果进行了对比与分析。分析与仿真结果吻合较好,可以为扰源-航天器耦合微振动特性分析提供参考。
控制力矩陀螺;柔性界面;扰动力特性;Simulink建模与仿真;解析动态加速性
1 引言
高性能航天器搭载的高指向精度和高分辨率的有效载荷,对航天器上的微小扰动十分敏感。微小扰动由航天器在轨运行期间的运动或振动部件引起,其定义为微振动[1]。航天器的微振动可带来两类问题:一是各种活动部件之间及其与航天器整体的结构响应耦合问题;二是对微振动敏感的有效载荷性能或科学试验结果会受到影响[2]。控制力矩陀螺(CMG)具有能够精确、连续地输出力矩,不消耗燃料,不污染光学设备和飞行环境等优点,是大型长寿命或要求快速姿态机动的航天器的首选执行机构[3-4]。但是,CMG运动机构又是高性能航天器最主要的扰源[5]。随着我国航天器技术的发展,由CMG引起的航天器结构微振动,将成为影响精密有效载荷实际工作性能的重要因素[6]。因此,为了满足高性能航天器的任务需求,必须对CMG引起的微振动予以足够的重视。
CMG内部结构模态与电磁组件等产生的微观扰振之间存在着耦合,称为内部耦合;同时,整个CMG与它的柔性基础结构之间也存在着耦合,称为外部耦合。综合国内外研究成果,对CMG、飞轮等运动机构带来的外部耦合微振动的研究主要集中在理论分析、建模仿真和试验3个方面。其中,国外对分析方法的研究主要以飞轮为对象,且大致经历了标准微振动分析法、静态加速性分析法和动态加速性分析法3个阶段。将微振动源在固定界面上测得的扰动直接作为输入,分析基础结构输出响应的方法,称为标准微振动分析法。由于扰源与柔性基础结构间存在耦合效应,固定界面条件并不能精确地代表扰源安装在航天器上时的真实界面条件,于是Laila Mireille Elias等人于2001年提出了静态加速性分析法[7-8],并于2003年把陀螺效应考虑进来对其进行了修正[9-10]。考虑陀螺效应后的静态加速性分析法在外部耦合微振动特性预测方面较标准微振动分析法有了很大进步,但由于没有体现扰源内部振动模态,因此限制了预测精度[11]。2011年起,Zhe Zhang、Guglielmo S.等人也对飞轮引起的微振动展开了一定研究[12-13],并于2013年提出了一种基于动态加速性的飞轮微振动分析方法[14-15],准确性较静态加速性法有所提高。Zhe Zhang等人研究采用的是一个存在内部耦合的柔性支撑飞轮,对CMG的外部耦合扰动特性研究有着很好的指导意义。
本文以CMG-柔性基础结构耦合系统为研究对象,进行了基于扰源解析动态加速性与柔性基础结构解析加速性的外部耦合动力学特性分析方法研究,并与Simulink动力学建模与仿真法进行了对比与分析。本文方法可以为扰源外部耦合微振动特性分析提供参考。
2 Simulink动力学建模与仿真法
Math Works公司推出的基于MATLAB平台中的Simulink是动力学系统仿真领域中最为著名的仿真集成环境之一,在各个领域都有广泛应用。它采用模块组合方式建模,可以快速、准确地创建动力学系统模型,并在此基础上进行仿真分析[16]。本文对CMG-柔性基础结构耦合系统的动力学建模与仿真,即在MATLAB/Simulink中采用状态空间法进行。
CMG-柔性基础结构耦合系统动力学模型如图1所示,包括自由界面、固定界面和柔性界面三种情况。图1(a)自由界面模型(即内部耦合模型)分为内部自由度与安装界面自由度两部分,xa为内部自由度,xb为安装界面自由度。fa为作用在内部自由度上的扰动力,主要由高速转子不平衡、轴承旋转等因素产生;fb为作用在界面自由度上的扰动力,主要由低速框架轴承、电机等因素产生。将自由界面模型的安装界面固定,即可得到固定界面模型,如图1(b)所示,其中fB为CMG固定界面扰动力。将CMG与柔性基础结构连接,即可得到柔性界面模型(即外部耦合模型),如图1(c)所示,其中fC为CMG与柔性基础结构之间的耦合扰动力。在初级研究阶段,假设CMG低速框架锁定,即只有高速转子转动。

图1 CMG-柔性基础结构耦合系统模型Fig.1 Model of CMG-flexible mounting structure coupled system
在Simulink中分别搭建固定界面、柔性界面模型,根据需要设置仿真步长、仿真时间等参数并进行仿真,即可得到时域下的固定界面、柔性界面扰动力(即外部耦合扰动力)曲线及数据。
3 解析动态加速性法
3.1 加速性法基本原理
对一个单自由度刚体来说,施加在刚体上的力与刚体加速度的比值(即刚体质量)是一个常值。但对于一个柔性多自由度系统,在一个位置施加外力,在同一或不同位置上测量加速度,力与加速度的比值将是一个与频率相关的变量,该变量取决于多自由度系统的内部耦合特性,被称为动质量或表观质量。动质量的逆被称为加速性[7]。
如图2所示,CMG等扰源安装在航天器基础结构上,扰源运动时产生的内部扰动力W (相当于中图1的fa与fb),会在安装界面处产生大小相等方向相反的扰动力F(相当于中图1的fC)和大小与方向均相同的加速度。图2中,Gw为扰源上W到F的转换矩阵;Mw为扰源上到F的转换矩阵,即扰源动质量;As为航天器基础结构上F到的转换矩阵,即航天器基础结构的加速性。
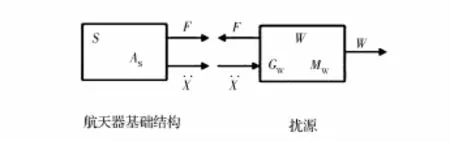
图2 航天器基础结构与扰源框图Fig.2 Diagrams of the spacecraft mounting structure and disturbance source
扰源在频域下的平衡方程为

式中:ω为频率。

转子不转时,式(1)中W(ω)=0,此时有以下关系:

由于转子静止,此时的扰源动质量Mw为静态动质量,扰源加速性Aw为静态加速性。
航天器基础结构在频域下的平衡方程为

将式(4)代入式(1),整理得

式中:I为与F(ω)同阶的单位矩阵。
由式(2)、式(5)可知,柔性界面扰动力与固定界面扰动力间存在如下关系:

由式(6)可知,若已知固定界面扰动力FB(ω),只需再求出扰源加速性Aw与柔性基础结构加速性As,即可计算出柔性界面扰动力F(ω)。这种以扰源固定界面扰动特性为输入,使用与扰源加速性和柔性基础结构加速性有关的修正函数进行修正,以获取外部耦合扰动特性的分析方法即为加速性法。
3.2 解析动态加速性
扰源固定界面扰动力易通过试验或仿真获取,故获取柔性界面扰动力的关键在于获取扰源加速性和柔性基础结构加速性。为使分析结果更加精确,对于扰源应采用动态加速性,即扰源在高速转子转动状态下的加速性。
动态加速性法具有很多优点:相对于传统微振动分析法,动态加速性法考虑了扰源与柔性基础结构之间的耦合作用,分析结果更接近于扰源在轨工作时的真实状态;相对于静态加速性法,动态加速性法考虑了陀螺效应和扰源内部振动模态,可有效提高分析的精确度;此外,动态加速性法能够以试验测得的固定界面扰动特性为输入,通过修正获取柔性界面扰动特性,而无需知道扰源内部扰动力,这点是Simulink动力学建模仿真法所不具备的。
通过对CMG内部耦合系统运动方程进行推导,可以得到CMG动态加速性的解析解。令图1(a)自由界面模型中的fa=fb=0,并施加作用在CMG内部自由度和安装界面自由度的外力Fss,此时CMG内部耦合系统运动方程在频域下写作:

式中:Mss、Css、Gss和Kss分别为CMG内部耦合系统的质量阵、阻尼阵、陀螺阵和刚度阵,Xss为CMG内部自由度和安装界面自由度的位移,下标ss代表整个CMG内部耦合系统。
假设初始条件为零,则有如下关系:

其中j为虚数单元。
根据式(8),运动方程(7)整理得

进而可得到整个CMG内部耦合系统的动态加速性:

在安装界面自由度使用单位载荷法,即可由Ass得到CMG的加速性Aw。该方法求得的是CMG在高速转子转动状态下的加速性,故此时的Aw为CMG的动态加速性。
国外文献中,获取柔性基础结构的加速性一般是通过试验测量,或对其结构有限元模型进行频响分析。而本文采用解析法来获取柔性基础结构加速性。
柔性基础结构的运动方程在频域下写作:

式中:Mstr、Cstr和Kstr分别为柔性基础结构的质量阵、阻尼阵和刚度阵,Fstr为作用在柔性基础结构安装点的外力,Xstr为柔性基础结构安装点的位移,下标str代表柔性基础结构。
假设初始条件为零,则有如下关系:

根据式(12),运动方程(11)整理得

进而可得到柔性基础结构的加速性

分别对CMG与柔性基础结构的有限元模型进行Guyan缩聚,即可获得它们各自的质量阵、阻尼阵和刚度阵,另外,已知CMG转动惯量与转速,则可计算出CMG的陀螺阵。由此,可以通过式(10)和(14)计算出CMG动态加速性和柔性基础结构加速性。
4 仿真结果与本文分析结果对比分析
Simulink仿真完成后,首先将仿真所得时域下的固定界面扰动力和柔性界面扰动力进行对比,观察时域下的耦合作用;然后将以上两种扰动力,经FFT变换转换到频域中;在频域中以固定界面扰动力为输入,通过解析动态加速性法获取柔性界面扰动力;最后将该柔性界面扰动力与FFT变换所得固定界面扰动力、柔性界面扰动力进行对比,进一步观察CMG与柔性基础结构之间的耦合作用,并观察解析动态加速性法与Simulink动力学建模仿真法所得各自由度的柔性界面扰动力曲线的吻合程度,以验证解析动态加速性法的准确性。
Simulink仿真所得时域下的CMG固定界面扰动力如图3所示。
本文首先使用一组假设的柔性基础结构动力学参数,初步探究解析动态加速性法在CMG-柔性基础结构耦合系统中的应用情况。Simulink仿真所得时域下的CMG柔性界面扰动力如图4所示。

图3 CMG固定界面扰动力Fig.3 Grounded disturbance of CMG
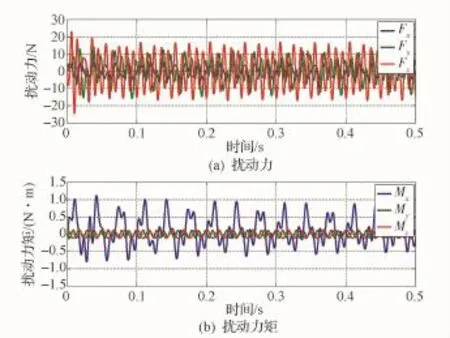
图4 CMG柔性界面扰动力(假设结构)Fig.4 Coupled disturbance of CMG(assumed structure)
六个自由度的Simulink仿真所得固定界面扰动力、柔性界面扰动力以及解析动态加速性法所得柔性界面扰动力在频域下的对比情况见图5到图10。
由图5~图10,可以得出以下结论:
(1)在时域与频域中,CMG柔性界面与固定界面下的扰动特性均存在明显不同,即CMG与柔性基础结构之间发生了耦合。从时域来看,相对于固定界面扰动力,柔性界面扰动力幅值有所减小,波形也有明显变化;从频域来看,柔性界面下系统的固有频率较固定界面时有一定偏移。
(2)在本文所使用的假设柔性基础结构动力学参数下,解析动态加速性法与Simulink动力学建模仿真法所得各自由度的柔性界面扰动力曲线均基本吻合,特别是在系统固有频率附近吻合较好。
使用假设柔性基础结构动力学参数初步验证了解析动态加速性法之后,采用一个真实的板式基础结构进行研究,该板结构有限元模型如图11所示。

图5 扰动力Fx对比曲线Fig.5 Disturbance comparison(Fx)

图6 扰动力Fy对比曲线Fig.6 Disturbance comparison(Fy)
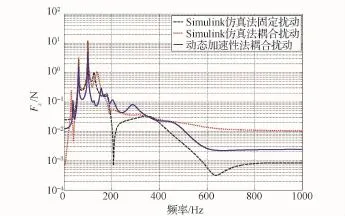
图7 扰动力Fz对比曲线Fig.7 Disturbance comparison(Fz)

图8 扰动力矩Mx对比曲线Fig.8 Disturbance comparison(Mx)
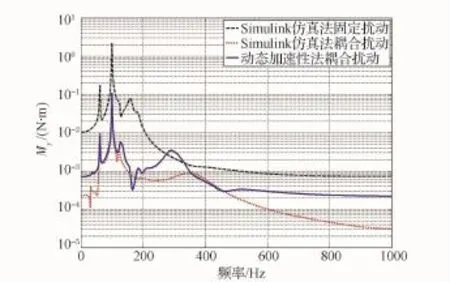
图9 扰动力矩My对比曲线Fig.9 Disturbance comparison(My)

图10 扰动力矩Mz对比曲线Fig.10 Disturbance comparison(Mz)
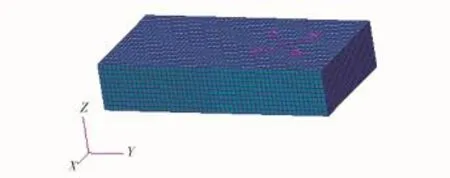
图11 真实基础结构有限元模型Fig.11 FEM model of true mounting structure
Simulink仿真所得时域中的CMG柔性界面扰动力如图12所示。
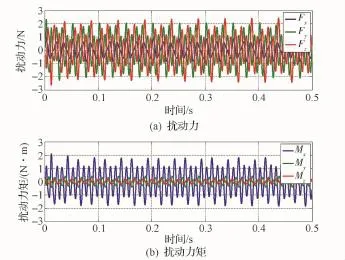
图12 CMG柔性界面扰动力(真实结构)Fig.12 Coupled disturbance of CMG(true structure)
六个自由度的Simulink仿真所得固定界面扰动力、柔性界面扰动力以及解析动态加速性法所得柔性界面扰动力在频域下的对比情况见图13到图18。

图13 扰动力Fx对比曲线Fig.13 Disturbance comparison(Fx)

图14 扰动力Fy对比曲线Fig.14 Disturbance comparison(Fy)

图15 扰动力Fz对比曲线Fig.15 Disturbance comparison(Fz)
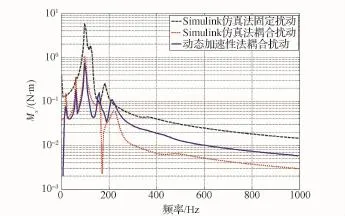
图16 扰动力矩Mx对比曲线Fig.16 Disturbance comparison(Mx)

图17 扰动力矩My对比曲线Fig.17 Disturbance comparison(My)
在图13到图18中,同样可看出CMG与柔性基础结构之间发生了耦合,且时域中的柔性界面扰动力幅值减小更加明显;频域中,柔性界面下系统的固有频率较固定界面时同样有一定偏移。在本文所使用的真实柔性基础结构动力学参数下,解析动态加速性法与Simulink动力学建模仿真法所得各自由度的柔性界面扰动力曲线均基本吻合,特别是在系统固有频率附近吻合较好。

图18 扰动力矩Mz对比曲线Fig.18 Disturbance comparison(Mz)
5 结束语
动态加速性法考虑了扰源与柔性基础结构之间的耦合作用,分析结果更接近于扰源在轨工作时的真实状态;还考虑了陀螺效应和扰源内部振动模态,可有效提高分析的精确度。此外,动态加速性法能够以试验测得的固定界面扰动特性为输入,通过修正获取柔性界面扰动特性,而无需知道扰源内部扰动力,这点是Simulink动力学建模仿真法所不具备的。相对于国外所采用的试验测量的方法和有限元模型频响分析法,本文通过解析方法获取柔性基础结构的动态加速性,实施起来更加简单,在分析精度满足工程需求的条件下,可以代替试验测量与有限元模型频响分析,有效节省分析时间。
通过本文对CMG柔性界面扰动力分析方法的研究,可获取柔性基础结构对扰源输出特性的影响机理,确定柔性基础结构对扰源输出特性影响的关键因素,了解航天器上微振动的产生与变化规律,有助于进一步深入分析微振动源与航天器结构的耦合微振动特性。同时,对今后的微振动抑制理论与方法研究也有一定的参考作用。
(References)
[1]ESA European cooperation for space standardization(ESA ECSS).ECSS-E-HB-32-26A Spacecraft Mechanical Loads Analysis Handbook[S].Paris:ESA,2013
[2]雷军刚,赵伟,程玉峰.一次卫星微振动地面测量试验[J].真空与低温,2006,14(2):95-98 Lei Jungang,Zhao Wei,Cheng Yufeng.A micro-vibration measurement of one satellite on the ground[J]. Vacuum&Cryogenics,2006,14(2):95-98(in Chinese)
[3]汤亮,陈义庆.双框架控制力矩陀螺群的建模与分析[J].航空学报,2008,29(2):424-429 Tang Liang,Chen Yiqing.Modeling and dynamics analysis of double-gimbal control moment gyros[J].Acta Aeronautica Et Astronautica Sinica,2008,29(2):424-429(in Chinese)
[4]刘宝玉,金磊,贾英宏.大型控制力矩陀螺动力学精细建模与仿真[J].空间控制技术与应用,2014,40(1):21-26 Liu Baoyu,Jin Lei,Jia Yinghong.Dynamics fine modeling and simulation of large-scale control moment gyro[J].Aerospace Control and Application,2014,40(1):21-26(in Chinese)
[5]邓瑞清,虎刚,王全武.飞轮和控制力矩陀螺高速转子轴向干扰特性的研究[J].航天控制,2009,23(4):32-36 Deng Ruiqing,Hu Gang,Wang Quanwu.Axial disturbance characteristics for high speed rotor of flywheel and CMG[J].Aerospace Control,2009,23(4):32-36(in Chinese)
[6]罗敏,王耀兵.航天器微振动被动抑制技术综述[C]// 2012年全国振动工程及应用学术会议.郑州:中国振动工程学会,2012 Luo Min,Wang Yaobing.Overview of spacecraft microvibration passive suppression technology[C]//Proceedings of the 11th National Vibration Technology and Application.Zhengzhou:Chinese Society for Vibration Engineering,2012(in Chinese)
[7]L M Elias,D W Miller.A structurally coupled disturbance analysis method using dynamic mass measurement techniques,with application to spacecraft reaction wheel systems[D].Boston:MIT,2001
[8]L M Elias,D W Miller.A coupled disturbance analysis method using dynamic mass measurement techniques[C]//Proceedings of the 43rd AIAA/ASME/ASCE/ AHS/ASC Structures.Structural Dynamics,and Materials Conference.Washington D.C.:AIAA,2002
[9]L M Elias,F G Dekens,I Basdogan,et al.A methodology for“modeling”the mechanical interaction between a reaction wheel and a flexible structure[C]//Interferometry in Space.Bellingham:SPIE,2003:541-555
[10]L M Elias,D W Miller.Dynamics of multi-body space interferometers including reaction wheel gyroscopic stiffening effects:structurally connected and electromagnetic formation flying architectures[D].Boston:MIT,2004
[11]I Basdogan,L M Elias,F Dekens,et al.Predicting the optical performance of the space interferometry mission using a modeling,testing,and validation methodology[J].Journal of Vibration and Acoustics,2007,129(2):148-157
[12]W Zhou,G S Agliett,Z Zhang.Modelling and testing of a soft suspension design for a reaction/moment wheel assembly[J].Journal of Sound and Vibration,2011,330:4596-4610
[13]Zhe Zhang,G S Aglietti.Coupled disturbance modeling and validation of a reaction wheel model[C]//Proceedings of the 12th European Conference on Space Structures,Materials&Environmental Testing.Noordwijk:ESA,2012
[14]Zhe Zhang,Guglielmo S Aglietti,Weiyong Zhou.Microvibrations induced by a cantilevered wheel assembly with a soft-suspension system[J].AIAA Journal, 2011,49(5):1067-1079
[15]Zhe Zhang,Guglielmo S Aglietti,Weijia Ren.Coupled microvibration analysis of a reaction wheel assembly including gyroscopic effects in its accelerance[J].Journal of Sound and Vibration,2013,332:5748-5765
[16]黎明安.MATLAB/Simulink动力学系统建模与仿真[M].北京:国防工业出版社,2012 Li Mingan.MATLAB/Simulink dynamic system modelling and simulation[M].Beijing:National Defense Industry Press,2012(in Chinese)
(编辑:李多)
Analysis Method for Coupled Disturbance at Flexible Interface of Control Moment Gyroscope
GAO Xingsu1LUO Wenbo1LIU Guoqing1LIANG Dongping1SUN Wei1GUAN Xin2
(1 Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)(2 Beijing Institute of Control Engineering,Beijing 100090,China)
This paper takes the coupled system of CMG and the flexible mounting structure as the research object,proposes an analysis method to predict the coupled disturbance by correcting the grounded disturbance by using the analytical dynamic accelerance of the CMG and the analytical accelerance of the flexible mounting structure,and then compares the analysis result with that of Simulink dynamic modelling and simulation.Analysis result agrees well with that of simulation,which can provide reference for analysis of the coupled micro-vibration between disturbance source and spacecraft.
CMG;flexible interface;disturbance characteristic;Simulink modelling and simulation;analytical dynamic accelerance
V414
:ADOI:10.3969/j.issn.1673-8748.2015.05.009
2015-08-05;
:2015-08-21
国家重大科技专项工程
高行素,女,硕士研究生,研究方向为航天器结构与机构。Email:tiankong0611@163.com。