嫦娥三号巡视器及其技术特点分析
2015-02-27申振荣张伍贾阳孙泽洲
申振荣 张伍 贾阳 孙泽洲
(北京空间飞行器总体设计部,北京 100094)
嫦娥三号巡视器及其技术特点分析
申振荣 张伍 贾阳 孙泽洲
(北京空间飞行器总体设计部,北京 100094)
嫦娥三号巡视器是我国月球探测二期工程探测器系统的重要组成部分,实现了我国首次地外天体表面巡视勘察。文章介绍了嫦娥三号巡视器的系统组成、构型及分系统方案要点;分析了月面移动、自主导航与遥操作控制、月面生存、地面试验模拟和系统资源约束等5个方面的技术特点和难点;给出了移动装置和车轮参数优化设计,天地协同操作控制,大温变热设计和自主光照唤醒,月尘和低重力等月面特殊环境模拟,系统集成与设计优化等工程解决措施。
嫦娥三号巡视器;系统设计;技术特点;工程措施
1 引言
2013年12月15日23时47分,嫦娥三号巡视器与着陆器在月面成功进行互相拍摄,嫦娥三号任务取得圆满成功,标志着我国探月工程第二步战略目标的全面实现。巡视器是嫦娥三号探测器系统的重要组成部分,是能够适应月球环境、携带科学探测仪器在月面进行多点就位探测的新型航天器。
从20世纪80年代开始,我国科研院所、高等院校纷纷开展巡视器相关技术的研究工作,展示了多种模型和原理样机。中国空间技术研究院于2004年联合国内相关技术优势单位,共同开展了巡视器方案论证与原理样机研制工作。通过3年多的工作,研制了国内第一辆月面巡视器原理样机,建成了国内最大规模的巡视器综合试验场,并利用原理样机完成了国内首次沙漠外场试验,为巡视器的工程研制奠定了基础。2008年,探月二期工程嫦娥三号进入工程研制,并最终研制出了适于月面工作的小型化、低耗能、高集成和高智能的玉兔号巡视器。
在嫦娥三号任务取得成功后,文献[1]和[2]从嫦娥三号探测器系统的角度对所取得的技术成就与创新、地面试验方法与试验技术等进行了总结。本文将嫦娥三号巡视器作为完整的系统,在介绍其系统方案的基础上,分析了月面移动、自主导航与操作控制、月面生存、地面试验模拟、系统资源约束等5个方面的技术特点,并提供了工程研制中的具体解决措施,可为后续行星表面巡视探测任务设计提供参考。
2 系统方案
嫦娥三号巡视器用于月面自动巡视勘察,因此要具备地形地貌识别、姿态确定、移动里程确定、自主避障及月夜生存等能力,并能够实现携带科学探测仪器在月面一定区域内运动,实现月面形貌与地质构造调查、月面物质成分和资源勘察、月面浅层内部结构探测等科学探测任务。
2.1 巡视器系统组成及构型
嫦娥三号巡视器包括移动、结构与机构、制导导航与控制(GNC)、综合电子、电源、热控、测控数传和有效载荷共8个分系统。巡视器的构型如图1所示,采用箱板式结构,大部分仪器设备安装在舱内的顶板上,移动装置差动机构、锂离子蓄电池组等设备安装在舱内的底板上;左右两块侧板可以拆卸,为舱内设备安装提供通道和操作空间。
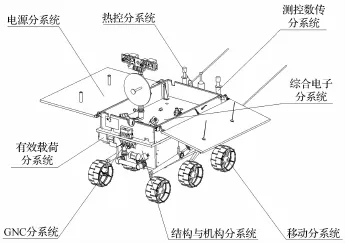
图1 嫦娥三号巡视器总体构型Fig.1 System configuration of Chang'e-3 lunar rover
2.2 分系统方案
(1)移动分系统。在对履带式、腿式和轮式等移动类型进行分析比较后,结合系统资源代价、发射状态包络尺寸等任务约束条件,并参考国外巡视器的发展状况与趋势,确定采用轮式方案。综合比较悬架的地形适应能力、月壤适应能力、车轮负载均衡性、承载能力、质量特性、结构复杂程度及技术成熟度等因素,选用主副摇臂悬架方案。移动分系统由车轮、摇臂和差动装置等组成,具备在月面前进、后退、转向(原地转向和行进间转向)、爬坡和越障能力。6个车轮采用独立驱动方式,并利用4个角轮实现转向,悬架分布在结构本体两侧,通过差动装置与结构本体相连,使所有的车轮均与地面保持接触。
(2)结构与机构分系统。它由结构和机构两部分组成。综合考虑结构刚度和强度,针对轻小型化设计需求,采用箱板式主承力结构方案,主承力结构由顶板、前后舱板、底板等组成,承受任务过程中遇到的各种载荷。机构包括太阳翼机械部分、桅杆和机械臂。为减少系统质量资源消耗,太阳翼机械部分的右太阳翼采用单自由度步进电机驱动实现对日定向转动,左太阳翼采用弹性组件展开并锁定的方案;同时,采用机构功能复用的系统设计思路,将相机和定向天线的指向机构综合集成于桅杆上,设计三自由度驱动的桅杆,可分时实现天线对地定向以及相机对周围360°范围成像;机械臂设计采用最小配置的三自由度关节型串联方案,使所承载的科学仪器能更接近所关注的月面探测目标。
(3)GNC分系统。它包括主动像素传感器(APS)太阳敏感器、惯性测量单元、导航相机、避障相机、激光点阵器,通过集成于综合电子分系统的软硬件实现环境感知、位姿和速度确定、路径规划、紧急避障、运动控制与安全监测等功能。采用全新的动静结合月面导航定姿、多轮协调运动的轨迹与航向跟踪控制方案,突破了地形可通过性量化分析的路径规划技术,单/双目被动视觉的主动结构光三维信息获取技术,以及点阵式离散三维信息的障碍识别技术,基于双目立体视觉系统实现了月面障碍探测和自主避障规划。
(4)综合电子分系统。它采用集中式一体化的体系结构,采用实时操作系统,内部利用CAN总线通信,对外利用LVDS、RS422接口形式实现信息交互,由一台电子设备实现遥测、遥控、程控、数据管理、导航与控制、机构驱动控制、火工品控制、供配电管理等功能集成。
(5)电源分系统。它由三结砷化镓太阳电池阵、锂离子蓄电池组、电源控制器组成。为节省系统质量开支并简化电源控制器设计,采取半调节母线方案,即在太阳电池阵供电时对母线电压进行全调节,在蓄电池组独立供电时不作调节,而直接输出到母线。为确保安全可靠地度过月夜,设计昼夜转换和夜昼转换策略,研制具有自关断和自接通功能的休眠唤醒电路,实现了昼夜转换过程中整器可靠自断电,实现了夜昼转换过程中自主触发接通供电回路从而自动唤醒,具体设计见文献[3]。
(6)热控分系统。它由两相流体回路、低温多层隔热组件、玻璃型二次表面镜(OSR)散热面、热控白漆、电加热器、热敏电阻、同位素热源(RHU)等组成。采用散热面对天并将大部分仪器设备直接安装在散热面上的方案,节省了热控用于热量收集、传输所需付出的资源,解决了有限资源下的月昼高温环境热控散热问题;设计了太阳翼覆盖散热面并利用两相流体回路将同位素热源的热能导入舱内的方案,解决了月夜极低温环境和整器断电无自发热情况下的热控保温问题。
(7)测控数传分系统。由X频段全向接收天线、X频段应答机、X频段固态放大器、X频段全向发射天线、X频段定向天线、UHF频段全向发射天线、UHF频段发射机及电缆组等组成。在巡视器加电工作后,X频段全向接收天线、X频段应答机与地面建立X频段上行遥控;X频段应答机、X频段固态放大器、X频段全向发射天线与地面建立X频段下行遥测;X频段应答机、X频段固态放大器、X频段定向天线与地面建立下行数传通道。此外,设计了UHF频段发射机、UHF频段全向发射天线与着陆器建立UHF频段器间通信通道,作为巡视器月面工作时下行遥测和数传链路的异构备份,进一步提高下行链路的可靠性。
(8)有效载荷分系统。为实现科学探测任务,配置了全景相机、测月雷达、红外成像光谱仪、粒子激发X射线谱仪及有效载荷电控箱,有效载荷及其功能见表1。

表1 有效载荷及其功能Table 1 Payloads and their functions
3 技术特点分析
巡视器作为我国首次研制的地外天体表面移动的新型航天器,相对于以往的地球轨道航天器有很大不同,面临活动机构较多、工作环境(主要是月面环境)严酷、天地交互频繁、系统资源约束严苛等技术难点,须采取系统优化设计、技术攻关以及地面充分试验等措施,解决月面移动、自主导航与操作控制、月面生存、地面试验模拟和系统资源约束等技术难题,确保巡视器在月面非结构化复杂环境(即没有人工道路及标志的自然环境)中安全行驶并到达指定位置。
3.1 月面移动技术
巡视器工作在松软月壤和分布着大小不等的月坑、月岩的非结构化环境,要求移动系统具备较高的通过性和爬坡越障能力。
(1)移动装置参数优化设计。在分析月坑、月岩几何参数及其月面统计分布规律的基础上,确定了移动系统最大运动速度200 m/h、爬坡角度30°和越障高度200 mm等总体性能指标。通过构型布局优化设计,合理布置巡视器本体质心位置和离地间隙,确保了各轮承载的均匀性和系统的几何通过性;通过系统运动学和多体动力学仿真,对系统的支撑通过性、几何通过性、机动性、稳定性进行了综合性能量化评估,确定了摇臂悬架和车轮的几何尺寸、离地间隙、转弯半径等重要参数。
(2)车轮构型优化设计。车轮的轮面弧度和宽度、筛网孔和棘爪的几何尺寸及分布等,决定了接地比压、牵引系数、附着系数等重要参数,并直接影响到系统的动力性和越障性能的优劣。通过单轮轮壤作用台架试验,测试不同构型车轮在不同速度、不同载荷下的性能,并在此基础上对轮壤动力学模型进行修正,实现了对工程使用的弹性筛网轮的参数优化。
在第1个月昼,嫦娥三号巡视器先后完成了两器释放分离、两器互相拍摄、功能性能测试等工作,验证了整器在实际月壤上的通过性及月面移动性能。嫦娥三号巡视器第1个月昼和第2个月昼在月面累计移动了118.9 m,月面行驶路线如图2所示(图中的坐标原点为着陆器在月面的位置)。
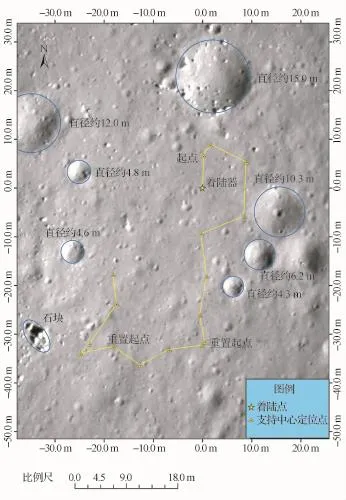
图2 嫦娥三号巡视器月面行驶路线Fig.2 Route of Chang'e-3 lunar rover
3.2 自主导航与遥操作控制技术
巡视器在月面未知复杂环境中工作,要具备自主能力和天地协同工作能力[4]。如何实现月面环境感知、障碍识别、局部路径规划及多轮运动协调控制,是自主导航控制必须要解决的难题。另外,巡视器月面运行过程是器地交互、地面持续支持的过程,巡视器在月面移动采取何种操作模式,如何设计研制满足巡视任务的地面任务支持与遥操作系统是必须要解决的难题。
(1)自主导航与运动协调控制。巡视器GNC分系统采用立体视觉技术实现月面未知环境感知,即利用相机图像获得周围地形的几何信息,通过对局部地形进行评价建立环境模型,以局部地形适宜度图的形式表示。在该适宜度图上对已设定的多条备选弧径进行评价,选取综合评价值最高的路径作为下一步的安全路径。考虑到巡视器的运动速度较低,以及器上计算资源的约束,巡视器的轮系协调控制主要采用运动学模型,并通过动力学仿真对轮系协调控制律进行离线验证。轮系运动协调控制包括整器速度与航向角控制、驱动轮速度与转向轮转向速度协调控制两层。通过整器和轮系两层控制,实现原地转弯、沿固定曲率运动(包括直线)和沿路径点到达目标点3类运动要求,每个控制周期给出各驱动轮转速、各转向轮转向速度的期望值,作为电机底层控制的输入。在研制过程中,通过相机标定试验、导航光学设备的视觉专项试验、GNC分系统的物理仿真试验、内场试验等,对自主导航控制性能进行了验证;巡视器月面工作期间,对基于双目立体视觉的环境感知和障碍识别、轨迹与航向跟踪控制等功能性能进行测试,验证了视觉探测避障算法、月面定姿策略和驱动转向协调控制算法的正确性,实现了巡视器月面自主导航与运动协调控制。
(2)地面任务支持与遥操作控制。综合分析国外相关技术发展趋势和国内技术现状,设计了地面遥操作控制与巡视器自主相结合的天地一体化运行控制方案。地面任务支持与遥操作控制系统主要由三维地形建立、任务整体规划和探测周期规划等功能模块组成,开发了基于特征点匹配、极线校正、立体匹配、三维重建等算法[5],实现了二维全景图像和三维地形图恢复和建立;开发了环境(光照、地形、星历等)模块、整器运动学模块、多约束优化算法等,实现了行为序列和行进路径等任务规划;开发了基于地形图的通过性分析和启发式路径规划算法(Field D*),实现了路径点序列生成和控制策略制定等全局规划。巡视器在月面工作时,地面任务支持与遥操作控制系统充分发挥了地面系统较强的处理能力和人机结合的优势,完成了月面环境三维恢复与重建、多约束三层次(任务规划、周期规划、导航规划)规划、多自由度机械臂就位探测规划、实时移动里程绘制等任务。
3.3 月面生存技术
巡视器在月面工作,必须解决月昼高温的热排散问题,以及月夜长达14天没有太阳能可利用条件下的保温问题,并在月昼/月夜转换中实现可靠的休眠和唤醒。
(1)大温变环境下的热控设计。月面可视为一温度分布不均匀的灰体面,其局部表面温度主要受当地接收的太阳辐射加热情况及月壤的热物性参数的影响。由于没有类似地球大气层的保温和传热,月面昼夜温差非常大,月昼温度可达+120℃,在太阳不能照射到的阴影区及月夜期间,月面温度可降至约―180℃。在提高巡视器舱内仪器设备的高温、低温适应能力的同时,针对月昼高温环境,采取以下措施:①根据月昼期间月面红外辐射热流与太阳辐射热流量级相当的特点,将巡视器对天面选取为散热面;②舱内电子设备集中布置在散热面上,减少热控导热环节,以利于月昼集中散热;③通过采用分时工作的方式,减少月昼期间舱内电子设备工作产生的热耗,以应对月午期间的高温环境。针对月夜长时间的极低温环境,采取以下措施:①尽量将电子设备布置在舱内,并通过隔热设计减少舱内漏热;②设计集发电和热控为一体的多功能太阳翼,通过太阳翼收拢覆盖散热面来达到切断舱内与外部环境热交换的目的;③设计两相流体回路方案,将布置在舱外的同位素热源产生的热量导入舱内,实现月夜期间舱内温度保持。
(2)高可靠休眠唤醒设计。安全、可靠地实现月昼/月夜转换,对月面长期工作至关重要。综合考虑巡视器及地面测控能力等约束条件,设计了自主全断电的昼夜转换休眠方案和光照自主加电的夜昼转换唤醒方案,研制高可靠光照唤醒电路。在昼夜转换时,首先完成休眠状态设置,最终利用延时指令自主完成整器断电,巡视器进入全断电休眠状态;在夜昼转换时,利用太阳翼发电输出的光照触发信号自主接通整器供电,电子系统得电工作并与地面建立测控通道,随后在地面控制下完成唤醒状态设置,巡视器恢复工作状态。
在第1个月昼和第2个月昼月面工作期间,嫦娥三号巡视器的温度水平良好,各设备温度均处于预定范围内并有足够的余量,验证了巡视器针对月昼高温热设计的正确性,以及对月面高温环境的适应性。在第2个月昼,巡视器顺利实现自主唤醒,根据传回地面的遥测参数判断器上各设备经历月夜后均正常,验证了过月夜策略的正确性,以及巡视器对月夜低温环境的适应性。总之,嫦娥三号巡视器通过了实际月面环境的考核,具备了月面生存的能力。
3.4 地面试验模拟
月球的月尘、重力、温度等与地球轨道的环境不同,因此要研究相关的试验方法和理论,配备相应的试验验证和仿真模拟设备,才能确保地面验证的有效性。
月尘可能会对巡视器的光学敏感器、太阳电池、相机镜头、热控涂层等表面造成污染影响,造成光透过率下降、热控性能降低等。此外,细小的月尘还可能侵蚀没有完全密闭的轴承、齿轮和其他机械装置,造成机械元件磨损,为此进行了部、组件月尘摸底试验,验证了防尘设计措施的有效性。低重力主要对活动机构和两相流体回路有较大影响,研制过程中采用配重卸载模拟1/6gn的重力环境,进行机构展开试验、移动性能试验;采用数值分析法,进行低重力条件下的流体回路性能分析,并在试验过程中通过调整流体回路储液器高度来达到等效模拟低重力的目的。针对月面大温差环境,完成舱外机构和天线等设备的低温存储试验、热控材料环境适应性试验、润滑油脂月面环境适应性评估试验等,并在整器条件下完成巡视器月面工作高温和低温等多种工况的热平衡试验,验证了热设计的正确性和设备对温度环境适应性。
在研制过程中,根据巡视器系统高度集成、工作模式复杂、活动部件多、月面工作环境恶劣的特点,在航天器研制常规试验(电性能综合测试、噪声和振动试验、热平衡和热真空试验等)的基础上,制定了完备的产品环境试验矩阵及整器室内和外场试验[6]、组合面移动性能试验等地面专项试验验证方案,研制了工程试验用模拟月壤[7]、月尘模拟装置、二维随动恒拉力低重力装置、超低温罐及内场等试验设施[8],实现了巡视器地面验证的充分性、有效性。
3.5 系统资源约束
巡视器要在总质量及包络空间等系统资源的严苛约束下,满足功能性能和可靠性安全性要求,因此如何减小整器质量,进行轻小型化设计是必须要解决的难题。
通过三维模装和协同设计技术,确定满足高容积比、高载荷比、小配重要求的巡视器构型和布局方案;通过多学科集成优化、电子系统集成、机构功能复用,实现了巡视器的轻小型化和总体最优[9]。采取的主要措施包括:
(1)在系统层面,采用电子集成、机构复用和轻量化设计。主要包括:电子功能系统集成、一体化设计;设备(相机)安装支架与设备一体化设计;太阳翼功能复用设计,即在月昼时,利用铺设在基板上的太阳电池片输出电能,在月夜时,基板覆盖在散热面上,通过其对天面上包覆的绝热材料起到保温效果;相机、定向天线安装在桅杆上,共用一套机构;选用轻质小型电连接器;舱外设备引线穿舱后直接与舱内设备连接,以减少电连接器。
(2)在单机/分系统层面,进行优化设计,使用轻质材料。结构与机构分系统预埋件、驱动机构壳体等采用镁合金,选用轻小型轴承、电机和谐波减速器,桅杆与太阳翼共用一套压紧释放装置;电源分系统锂离子蓄电池组采用更高比能量的正极活性材料、更轻的外壳材料;GNC分系统选用轻小型一体化设计部件。
通过以上措施,巡视器实现舱内设备56%的高容积率和13%的载荷比,并最大程度地规避了质量超标的风险,满足了系统资源约束。
4 结束语
嫦娥三号巡视器实现了我国首次在地外天体表面巡视勘察的目标,开展的月球浅层结构剖面探测属国际首次,突破了月面移动、自主导航与遥操作控制、月面生存等关键技术,取得了新型航天器总体设计、轻小型机构、双目立体视觉导航、任务规划与遥操作控制、重力辅助两相流体回路、自主休眠光照唤醒等一批具有自主知识产权的创新科研成果,为后续月球和火星巡视探测任务奠定了良好的技术基础,也为未来深空探测任务积累了丰富的经验。
(References)
[1]Sun Zezhou,Jia Yang,Zhang He,et al.Technological advancement and promotion roles of Chang'e-3 lunar probe mission[J].Science China:Technology Science,2013,56(11):2702-2708
[2]孙泽洲,张熇,贾阳,等.嫦娥三号探测器地面验证技术[J].中国科学技术科学,2014,44(4):369-376 Sun Zezhou,Zhang He,Jia Yang,et al.Ground validation technologies of the Chang'e-3 lunar spacecraft[J]. Science China Technological Sciences,2014,44(4):369-376(in Chinese)
[3]雷英俊,张明,金波,等.月面探测器月夜休眠自主唤醒方法[J].航天器工程,2014,23(6):13-16 Lei Yingjun,Zhang Ming,Jin Bo,et al.Research on autonomous sleep-reboot of lunar probe[J].Spacecraft Engineering,2014,23(6):13-16(in Chinese)
[4]贾阳,张建利,李群智,等.嫦娥三号巡视器遥操作系统设计与实现[J].中国科学技术科学,2014,44(5):470-482 Jia Yang,Zhang Jianli,Li Qunzhi,et al.Design and realization for teleoperation system of the Chang'e-3 rover[J].Science China Technological Sciences,2014,44(5):470-482(in Chinese)
[5]魏士俨,申振荣,张烁,等.月球车图像超分辨率重建算法[J].武汉大学学报(信息科学版),2013,38(4):436-439 Wei Shiyan,Shen Zhenrong,Zhang Shuo,et al.Moon rover image super-resolution reconstruction algorithm[J].Geomatics and Information Science of Wuhan University,2013,38(4):436-439(in Chinese)
[6]贾阳,王琼,王芳,等.月面巡视探测器外场试验方法[J].航天器环境工程,2012,29(6):602-607 Jia Yang,Wang Qiong,Wang Fang,et al.Research on the methods of lunar rover field test[J].Spacecraft Environment Engineering,2012,29(6):602-607(in Chinese)
[7]贾阳,申振荣,党兆龙,等.模拟月壤研究及其在月球探测工程中的应用[J].航天器环境工程,2014,31(3):241-247 Jia Yang,Shen Zhenrong,Dang Zhaolong,et al.Lunar soil simulant and its engineering application in lunar exploration program[J].Spacecraft Environment Engineering,2014,31(3):241-247(in Chinese)
[8]贾阳,申振荣,庞彧,等.月面巡视探测器地面试验方法及技术综述[J].航天器环境工程,2014,31(5):464-469 Jia Yang,Shen Zhenrong,Pang Yu,et al.A review of test method and technologies for lunar rover[J].Spacecraft Environment Engineering,2014,31(5):464-469(in Chinese)
[9]张旺军,申振荣,李群智,等.月球巡视器的系统设计优化方法研究[J].航天器工程,2014,23(3):4-11 Zhang Wangjun,Shen Zhenrong,Li Qunzhi,et al. Study on system design and optimization method of lunar rover[J].Spacecraft Engineering,2014,23(3):4-11(in Chinese)
(编辑:夏光)
System Design and Technical Characteristics Analysis of Chang'e-3 Lunar Rover
SHEN Zhenrong ZHANG Wu JIA Yang SUN Zezhou
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
Chang'e-3 lunar rover is the key of spacecraft system in the phaseⅡof China lunar exploration program.This paper introduces the system composition,configuration and primary subsystem of lunar rover firstly.Secondly the technical characteristics and difficulties are analyzed in five aspects,namely locomotion on the moon,self-navigation&teleoperation control,surviving on the moon,ground validation technologies,restricted system resources.Lastly the engineering solving measures are represented including parameter optimization of the locomotion and wheels,coordinated control between at the moon and from the earth,thermo-design on largescale change of temperature,autonomous reboot by sunlight,simulation of special environment of the moon such as dust and low-gravity,system integration and optimum design.
Chang'e-3 lunar rover;system design;technical characteristic;engineering measure
V476.3
:ADOI:10.3969/j.issn.1673-8748.2015.05.002
2014-12-04;
:2015-06-28
国家重大科技专项工程
申振荣,男,硕士,高级工程师,从事深空探测器总体设计和研制工作。Email:zrshen@sina.com。