探讨调节阀作用方式引发的故障及解决方案
2015-02-26皮宇
皮宇
(中石化洛阳工程有限公司,河南 洛阳 471003)
探讨调节阀作用方式引发的故障及解决方案
皮宇
(中石化洛阳工程有限公司,河南 洛阳 471003)
稿件收到日期: 2015-04-20,修改稿收到日期: 2015-07-24。
摘要:针对工程项目中调节阀、执行机构、阀门定位器的作用方式与操作组态之间不匹配易引发潜在的安全问题,描述了常见的事故状态,根据组态过程中出现的一系列显示画面与阀门实际开度不一致的现象,通过增加反向器,设计了一种简单可靠的虚拟F. O阀门组态方式。实践证明: 该方案有效解决了组态与现场阀门之间的联动问题,提高了安全性。
关键词:作用方式正作用反作用调节阀操作画面DCS组态
在笔者最近实施的几个工程项目中,遇到一个共性问题,调节阀在施工联调联校时,控制室显示画面(以下简称画面)中阀门的开度与现场实际阀门开度很难保持一致,部分手操开度与实际阀开度一致,部分相反,尤其是很多进口的阀门。简单地说,部分调节阀信号与阀门开度呈正向关系,给4mA信号时阀门关闭,给20mA信号时阀门全开,部分正好相反,而且与阀门的事故状态没有关系,操作人员期望画面与现场开度一致,但是组态过程中遇到一定的困难,笔者针对该现象进行分析。
1现场阀门作用方式问题的产生及解决
1.1正反作用的定义
1) 严格意义上讲,调节阀正反作用是针对不同对象定义的。当针对气动调节阀整体,按作用方式不同可分为气开阀与气关阀两种,气开阀随信号压力增加而打开,无信号时阀处于关闭状态;气关阀随信号压力增加而逐渐关闭,无信号时阀处于全开状态[1]。气开阀在工程设计文件中定义为正作用(F.C)类型,即事故状态时阀应该处于关闭位置;气关阀在工程设计文件中定义为反作用(F.O)类型,即事故状态时阀应该处于全开位置。
2) 针对执行机构而言,正反作用是指信号压力增大时,执行机构的推杆向下动作的为正作用式执行机构,反之为反作用式执行机构[2-3]。
3) 针对阀门定位器而言,正反作用是指电信号增加时,输出到执行机构的信号压力增加为正作用,反之为反作用。
气开阀不一定必须配正作用的执行机构,气关阀也不一定必须配反作用执行机构,调节阀除与执行机构有关外,还与阀芯的结构及功能有关。为简单起见,笔者将电信号与阀位的开度保持一致的气开阀定义为正作用类型的F.C阀门,反之定义为反作用类型的F.O阀门。
1.2实际工程应用中对现场阀门作用方式的误解
事故状态下,阀门开与关的选择主要是从生产安全角度来考虑。当仪表供气系统故障等原因使信号压力中断时,即阀处于无仪表风信号压力的情况,应考虑阀处于全开还是关闭状态才能避免损坏设备,同时保护工作人员免受伤害。若阀处于全开位置危害小,则应选气关阀,反之选气开阀[1]。该状态由工艺过程决定,而不是由仪表决定的,很多工程公司及设计院的阀门规格书中只定义了事故状态,却未定义作用方向。项目回路联调时经常遇到的问题: 阀门厂家通常能够严格按照规格书来设置事故空气罐或复位弹簧的位置,直接将过滤减压阀气源关闭即可检查该状态,但是无论F.O或F.C阀门的信号方向通常为出厂标配正作用,阀门开度都随信号开度增加而增加。这样虽然组态很方便,画面很容易与现场阀门开度一致,但不利于生产安全,但也有随信号反向动作的,并无一定规律,进口阀门情况较严重。
1) 事故状态一: 仪表风源失去,不管电信号如何,阀门F.O应在全开位,阀门F.C应在全关位。基本上所有的调节阀厂家都能够满足。
2) 事故状态二:
a) 电缆损坏或接线松开,但是调节阀风源正常时,F.O阀门也应该在全开位(给4mA信号时阀门全开,给20mA信号时阀门全关,请注意这与操作界面给定的开度可能不一致,需要通过组态调整)。
b) 电缆断掉或接线松开,但是调节阀风源正常时,F.C阀门应该在全关位(给20mA信号时阀门全开,给4mA信号时阀门全关,请注意这与操作界面给定的开度通常是一致的,不需要组态调整)。
阀门联调时,部分F.O阀门的电信号与阀门反向,但是接线端子松开,气源没断时阀门却在全关位,因为部分单作用执行机构需配单作用阀门定位器且定位器出厂缺省为正作用,或双作用气缸配双作用定位器作用方向与上下气路连接匹配相反,解决方案很简单,如果智能定位器能调整作用方向的,直接用Hart表调整定位器的作用方式组态,或修改上下气缸气路连接,使其与上述F.C及F.O的信号描述方向一致,通过这个环节仅能解决现场侧阀门环节的安全问题。
2组态问题及解决方案
2.1操作员画面组态产生的问题
通常DCS厂家的画面组态对于调节阀手操基本上都有成熟的PID模块及阀门手操器模块。操作画面中这些模块上的调节阀操作都有标尺,基本上所有的操作人员都希望标尺上给出的实际开度就是调节阀真实的开度,而不需要考虑其他因素。
1) 对于正作用方式的F.C调节阀,组态及画面没有任何问题,易与PID流程图或设计提供的IO点表达成一致。
2) 对于反作用方式的F.O调节阀,很容易出现联调时阀门标尺与现场开度正好相反的情况,当现场调节阀通过上述过程标定好安全状态后,可通过组态方式解决。
2.2F.O阀门组态解决方案
1) 对于简单的单回路、串级副回路等,阀门手操的开度全部在PID模块中设置实现,可以实现无扰动切换,当回路最终执行元件为F.O类型的阀门时,将原设计的PID作用改为反向。因为修改了PID作用,必须再将PID模块下游AO模块输出的通道取反(相当于将F.O阀改为F.C阀,也有厂家PID模块输出可以直接取反),这样PID作用和输出通道同时取反,回路仍然保持为负反馈闭环回路,相当于没有修改。仅因为画面链接的原因,强制增加了输出通道取反,此时阀门通过PID的模式(Man/Auto)来设置,当选择Man时,画面输入0(请注意手操是在PID正反作用的下游实施,手操的给定不受PID正反作用的影响),相当于实际输出100%(20mA,通过AO模块取反后,信号方向已经反向),F.O阀将全关,从而实现F.O阀操作员画面设定与现场阀门实际开度一致,而且投自动时也不会产生问题。
2) 对于比较复杂的回路,PID模块输出可能又与其他逻辑或组态模块有牵联,或对于分程控制回路,一个PID模块输出信号给2个或更多调节阀时,每个阀门必须单独设置手操器,PID模块的手操功能需禁止,以防操作员误动作,这些回路中的调节阀必须用手操器设置开度。此时,如果执行元件中有上述回路特征的F.O阀门时,必须想办法将F.O阀处理为F.C阀,否则无法实现画面手操器给定值与现场反作用F.O阀开度一致。实际上很多用户如果现场阀门严格按照上述方式调校后,都采用修正相关上游组态模块的方式来实现,例如: 将阀门分程模块中0~100%反向设置为100%~0,或修改超驰控制的高低选择,但是带来的问题将继续增多,可能引发隐蔽的错误,正常操作时不容易发现。例如超驰,当选择器选中时,发现阀门动作方向与预定方向反向,导致误操作发生危险,而且组态与设计文件PID图及IO表完全对应不上,很难检查其组态的正确性。
笔者设计了一个简单可靠的组态方式,经过实践检验比较有效,称为虚拟F.O阀门组态方式,适用于以下组态情形: PID调节器与阀门之间除具有简单的AO模块以外,还存在其他逻辑(分程、超驰、同时作用、加和等)的复杂回路。以上情形不能通过PID模块对阀门设置开度时,需对每个阀门单独设置手操器。组态关系如图1所示。
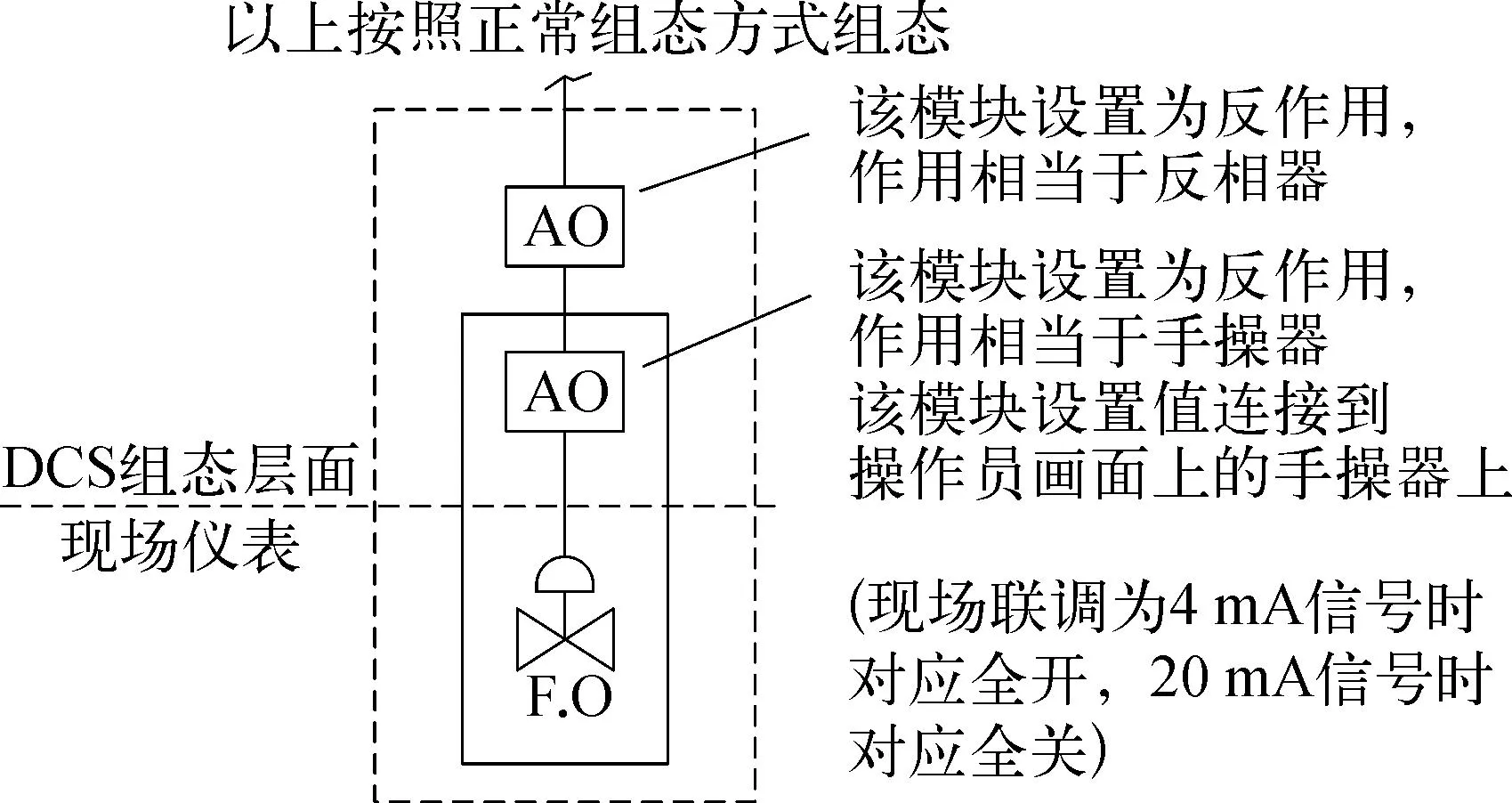
图1 虚拟F.O阀门组态方式示意
图1中,通过增加2个反向器使虚线内F.O阀门维持原来反作用信号方向的特性,这样整个回路组态在虚线范围上游不受任何影响,可严格按照PID图或设计原图组态,不需要做任何修改,仅在有F.O阀门的输出环节局部做虚线内的处理。虚线框内紧挨阀门的AO模块则作为链接上层操作员画面的手操器,且设置为反向,这样操作画面相当于给F.C阀门手操,作用方向为正向,满足了操作画面设定与现场F.O阀开度一致的要求。但是上游增加反向器,相当于整个虚线内没加反向,保持了整体回路的负反馈特性,回路投用自动或串级不受任何影响。整个虚线范围相当于原F.O阀,可以称为虚拟F.O阀门。
该组态唯一需要注意的是手操器由手动切自动时,如何无扰动实现,可能存在信号跟踪的问题,这需要将其交给DCS厂家的专家来处理。
3结束语
以上为项目联调中遇到的普遍问题,解决方案很多,例如调整现场阀门定位器全部为正作用信号方向等,这样会削弱阀门的安全性,尽管解决方案更简单,并不是值得推荐的最佳解决方案。
经过工程实践检验,上述解决方案很好地兼顾了组态与现场阀门施工调校及设计文件的关系,且处理很简单,具有一定的借鉴意义。
参考文献:
[1]明赐东.调节阀计算 选型 使用[M].成都科技大学出版社,1999: 65-66.
[2]陆德民,张振基,黄步余.石油化工自动化控制设计手册[M].3版.化学工业出版社,2000:232.
[3]林桥,张胜军,肖超波,等.高智能化、自动化和网络化的安全阀校验管理系统[J].化工自动化及仪表,2014,41(08): 935-938,962.
[4]张宇,李墨林.利用DCS的AO特性改善调节阀的控制品质[J].化工自动化及仪表,2013,40(06): 802-803.
[5]于蕾.聚乙烯装置的调节阀选型[J].石油化工自动化,2012,48(04): 73-75.
[6]刘秀琴,张少鹏,张道光.离心泵变频调速与调节阀组合控制设计方案探讨[J].石油化工自动化,2013,49(01): 11-14.
中图分类号:TH137.52+3
文献标志码:B
文章编号:1007-7324(2015)05-0080-02
作者简介:皮宇(1973—),男,重庆人,1995年毕业于石油大学工业过程自动化专业,获学士学位,现工作于中石化洛阳工程有限公司仪电室,从事国内外工程设计工作,任高级工程师。