基于鲁棒控制的超轻度混合动力汽车传动系统控制策略
2015-02-25张伯俊
王 谦,张伯俊
(天津职业技术师范大学汽车与交通学院,天津 300222)
基于鲁棒控制的超轻度混合动力汽车传动系统控制策略
王 谦,张伯俊
(天津职业技术师范大学汽车与交通学院,天津 300222)
对金属带式无级变速CVT的工作原理进行了分析,推导出其动力学方程,利用基于鲁棒性的控制器对CVT中的车速和发动机转速控制目标进行控制,并在Matlab下构建控制模型,在硬件在环试验台下进行仿真。仿真结果表明:基于鲁棒性的PID控制算法是有效的,可通过调节目标系统夹紧力和实际系统夹紧力之间的差值,大幅度提升传动系统的稳定性以及响应速度,并且可以明显改善整车的加速性能和缩短制动时间。
混合动力;无级变速传动;鲁棒性;硬件在环仿真
超轻度混合动力汽车的研究是混合动力车辆研究的一个新兴问题和热点,它采用功率比现有的混合动力汽车更小的小功率电机作为辅助动力源,其传动系统是以新型的回流式无极变速系统为基础而设计的。该系统具有超大的速比调节范围,在性能方面,超轻度混合动力汽车传动系统除了具有发电、起动一体化轻度混合动力汽车传动系统的电动机辅助发动机怠速起停和制动能量回收的特性外,还可以在进出车位以及交通阻塞等汽车爬行工况下使用电动机独立驱动[1]。本文将利用基于鲁棒性的PID控制器对其中的车速和发动机转速等控制目标进行控制,研发更为实用的控制策略,以改善现有混合动力汽车传动系统的相关特性。
1 工作模式的确定
回流式无级变速器装置是由金属带无级调速装置、定速比齿轮副、行星排、3组离合器、单项离合器和制动器组成[1]。超轻度混合传动系统的结构以及传动特性分别如图1和图2所示。根据超轻度混合动力传动系统的性能特点,传动系统的工作模式可分为起步工作模式以及驱动工作模式[2]。起步工作模式包括怠速起停工况、传统起步工况和爬行起步工况。驱动工作模式包括超低速行驶工况、低速充电行驶工况和正常行驶工况、能量回收行驶工况以及倒车行驶工况[3]。表1为不同工况模式下其传动系统的操作特性。
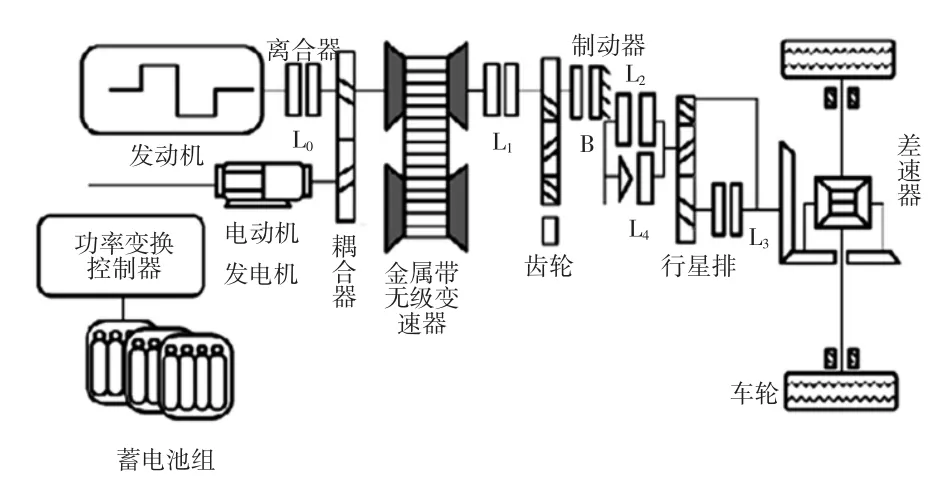
图1 防爆柴油机进排气系统的典型结构
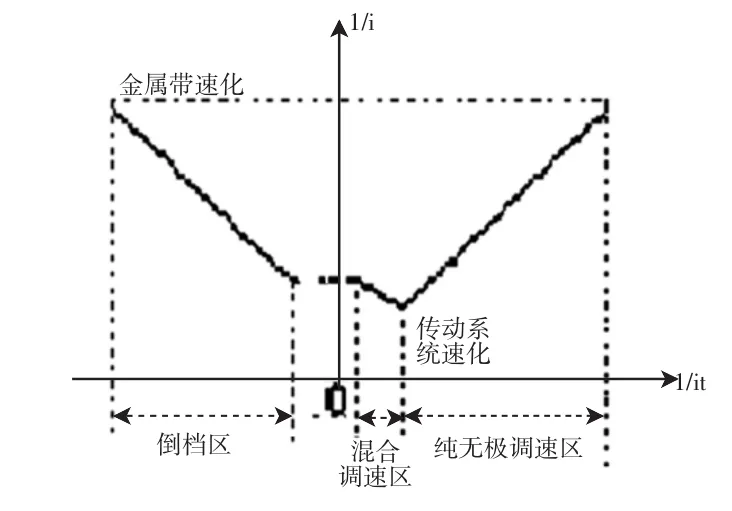
图2 超轻度混合动力系统传动特性
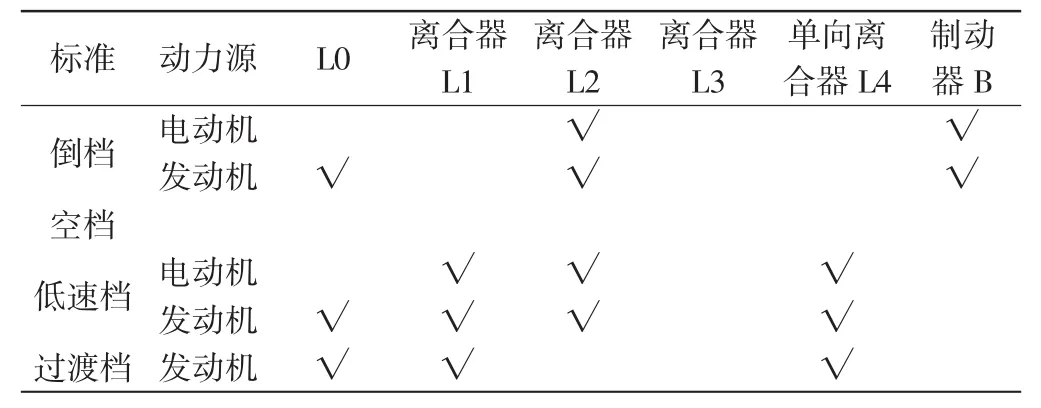
表1 超轻度混合动力传动系统的操作特性
2 金属带式CVT原理和动力学数学模型
由图1可知,可以通过调节电机和发动机的实时转矩进行车速控制。同时利用发动机转速响应比电机转速响应慢的特点,控制电机转矩快速调整发动机转速,实现车速与发动机转速、电机转速的耦合控制[3]。金属带式CVT的状态方程为:

式中:J为等效转动惯量,下标m、g、e、分别为驱动电机、发电机和发动机;δ为等效旋转质量系数;TL为地面阻力矩;Te为飞轮转矩;Tm为驱动电机转矩;Tg为发电机转矩;k为变速箱传动比;rω为车轮静力半径;C为行星齿轮机构特性参数,可采用式进行计算;ωe为发动机速度;m为整车质量;V为车速。将方程等效成以下形式:
式中:


式中:f为滚动阻力系数;Cd为空气阻力系数;Aω为整车迎风面积;α为道路坡度。
3 控制器的设计
当系统具备鲁棒特性时,其具有以下特性:①较低的灵敏度;②在参数的变化范围内是稳定的;③在控制系统出现一组变化时,系统性能可以保持满足指标要求。鲁棒性是对分析和设计阶段未考虑到的影响因素,如扰动、测量噪声等,系统在执行任务时能够克服这些不利影响,从而达到相应指标的能力。图3中虚线框表示基于鲁棒性的PID控制器[4]。

图3 PID控制器结构
图中,Vref∈R(2)为控制系统参考输入向量(参考车速和发动机转速);U(t)∈R(2)为控制系统输入控制向量(发动机转矩和电动机转矩);y(t)∈R(2)为控制系统控制输出向量(实际车速和发动机转速)[5]。
通过计算,得到相应的ei(i=0,1,2)。将线性反馈定义为相应的函数,将位于误差原点附近的反馈设计成线性的,以解决线性组合导致的过渡速度与超调之间的矛盾。

根据控制目标进行调节,找出鲁棒性较好的一组参数[6-7]。最后取ao=a1=0.5,a2=1.5,a3=5。
在式(2)中,A、B为满秩矩阵,不考虑车速的影响,对状态方程进行线性化处理,通过相应的控制方法,可得出线性反馈控制律为:

将上式和图3相结合,便构成了基于鲁棒性控制的PID控制器结构图,如图4所示。

图4 基于鲁棒性的金属带式CVT的PID控制框图
其中,基于鲁棒性的PID组合为:

4 硬件在环仿真试验及结论
硬件在环仿真实验台是将实际物理模型与计算机虚拟模型相结合的半物理仿真实验台,其包括CVT实物、主机、工控机、控制柜,信号采集卡及其接口板等组成。仿真时,主机上建立的仿真模型输到工控机上,由工控机驱动仿真实验台进行仿真。具体仿真参数为:整车质量2 100 kg,发动机等效转动惯量0.723 kg·m2,电动机/发电机等效转动惯量0.441kg·m2,空气阻力系数为0.6,等效转动惯量系数1.06,行星排特性参数2.5。在模型中,控制输入为发动机转矩、参考输入车速、发动机转速等;系统输出为实际车速和发动机实际转速。仿真条件为:当发动机在转矩和档位确定的条件下,参考转速从1 900 r/min左右开始,经过6 s达到1 300 r/min左右,持续12 s后,变为1 500 r/min左右,参考车速从20 km/h开始,持续6 s后,变为11 km/h左右,图5为基于鲁棒性的PID与传统PID控制系统获得的发动机转速和车速图。
从以上结果得出下列结论:
(1)与传统PID控制方法相比,基于鲁棒性的控制方法的响应速度有了较大提升(提升了2~3 s),并且当车速和发动机转速发生扰动时,基于鲁棒性控制的适应性更强,响应速度加快,从而能尽快与目标转速或车速相吻合,使发动机转速保持稳定,而传统PID适应性较差,响应时间改善不明显。
(2)2种控制方法经过一定过渡后都会达到稳定,但是基于鲁棒控制方法的车速稳定在11~12 km/h,发动机转速稳定在1 500~1 600 r/min,而传统的PID控制方法则在13km/h、1800r/min左右达到稳定。可见,基于鲁棒性的PID控制策略更好地消除了静态误差。

图5 基于鲁棒的PID与传统PID控制比较
5 结束语
通过对超轻度混合动力车辆传动系统工作模式的分析,推导出了传动系统的动力学模型,进而建立了金属带式CVT的PID控制器模型。仿真结果表明,与传统的PID控制器相比,基于鲁棒性的PID控制策略可将响应速度提升2~3 s,并具有较好的抗扰动性和适应性,在经历了相应的扰动后,可将车速与发动机转速稳定在一个更贴近目标值的较低状态,即基于鲁棒性的PID控制策略可以更好地消除传动过程中的静态误差。
[1] DRAKUNOV S V,ASHRAFI B,ROSIGLIONI A.Yaw control algorithm via sliding mode control[C]//American Control Conference 2000.2000:580-583.
[2] 廖建,孙冬野,秦大同.金属带式无级变速器传动效率的理论分析[J].重庆大学学报,2003,26(3):12-15.
[3] 张伯俊,郭家田.超轻度混合动力汽车动力转换控制策略[J].天津职业技术师范大学学报,2011,21(3):5-8.
[4] 左义和,项昌乐.基于非线性PID的E-CVT控制研究[J].机械传动,2010,34(4):10-16.
[5] 玄圣夷,宋传学,靳立强,等.基于多级鲁棒PID控制的汽车稳定性控制策略[J].吉林大学学报,2010,40(1):13-18.
[6] 李明泽.混合动力电动汽车驱动系统控制策略研究[D].武汉:武汉理工大学,2002.
[7] RUBIN D,AROGETI S.Vehicle yaw stability control using rear active differential via sliding mode control methods[J]. Control&Automation(MED).2013,21(1):317-322.
Control strategy of super mild hybrid electric vehicle drive system based on robust control
WANG Qian,ZHANG Bo-jun
(School of Auomotive and Tansportation,Tianjin University of Technology and Education,Tianjin 300222,China)
The principle of the metal belt type continuously variable CVT is analyzed to derive the kinetic equation of it. The vehicle speed and engine speed are used as target by a robust controller for the CVT controlling and the control model in the Matlab is established to realize the simulation in the hardware in the loop test bench.The simulation results show that the robust PID control algorithm is effective,which can greatly improve the system stability,response speed,dynamic characteristics and so on,and can also improve the accelerated performance significantly and reduce the braking time.
hybrid;CVT;robust;simulation of hardware in the loop
U469.7
A
2095-0926(2015)01-0018-03
2014-12-16
天津市应用基础研究计划项目(14JCTPJC00519).
王 谦(1989—),男,硕士研究生;张伯俊(1956—),男,教授,博士,硕士研究生,研究方向为车辆动力学及控制.
