基于电传飞控技术的直升机试飞验证研究
2015-02-24姚海忠王正伟张浩华
姚海忠,王正伟,张浩华,李 波
(1.陆航试飞大队,江西 景德镇 333001; 2.中国直升机设计研究所,江西 景德镇 333001)
基于电传飞控技术的直升机试飞验证研究
姚海忠1,王正伟1,张浩华2,李 波2
(1.陆航试飞大队,江西 景德镇 333001; 2.中国直升机设计研究所,江西 景德镇 333001)
针对加装了航向电传飞控系统的验证机,分别采用工程模拟器试验和空中试飞方式对验证机进行飞行品质分析和论证,并对典型的RCDH操纵响应类型品质进行了分析和评定。
电传飞控;验证机;工程模拟器;飞行品质
0 引言
随着现代战争对直升机使用要求的提高,人们对直升机的飞行品质提出了越来越高的要求。依靠传统的飞控系统已无法完全满足ADS-33E飞行品质规范的设计要求,采用先进的电传飞控系统是有效的技术途径,是直升机升级换代的重要标志[1]。目前美国的AH-64D、UH-60M、S-92及欧洲的NH-90、EH-101等直升机都采用了电传飞行控制系统[2];国内装备的直升机采用的均是机械操纵+有限权限自动驾驶仪/控制增稳的传统飞控系统,直升机电传飞控技术飞行验证研究为国内首次开展,将为电传飞控技术在国内直升机领域的应用奠定技术基础。
电传飞控系统与传统飞控系统(机械操纵+增稳系统)相比,能大幅提高直升机的飞行品质,提高直升机的安全性,减轻系统重量,同时提高系统维护性,降低使用费用[3]。
本文在直升机电传飞控系统顶层设计、解耦控制律设计、原理样机研制及地面试验等研究的基础上,开展了直升机电传飞控系统技术飞行演示验证研究,针对加装了航向电传飞控系统的电传验证机,结合验证试飞的体验,论述了电传飞控系统试飞的各个环节和验证结果。
1 试飞对象
1.1 验证机状态
直升机电传飞控演示验证验证机为单旋翼带尾桨构型,四片主桨叶,星型柔性桨毂,涵道式尾桨;前三点式可收放起落架。
为了降低风险,俯仰、横滚、总距操纵线系及执行机构与改装前的原机相同;航向轴将原操纵线系断开,由航向操纵舵机代替原航向助力器。
1.2 电传飞行控制系统架构
验证机航向操纵舵机代替原航向助力器后,电传控制计算机通过电信号指令航向舵机运动来实现航向轴的操纵。航向操纵舵机为机械双余度、电气四余度的旋转阀式DDV舵机(RDDV)。航向舵机具有全权限的操纵能力,可以完全跟踪脚蹬位移,也可以在脚蹬位移的基础上叠加飞控控制律的指令。演示验证电传飞控系统架构见图1。
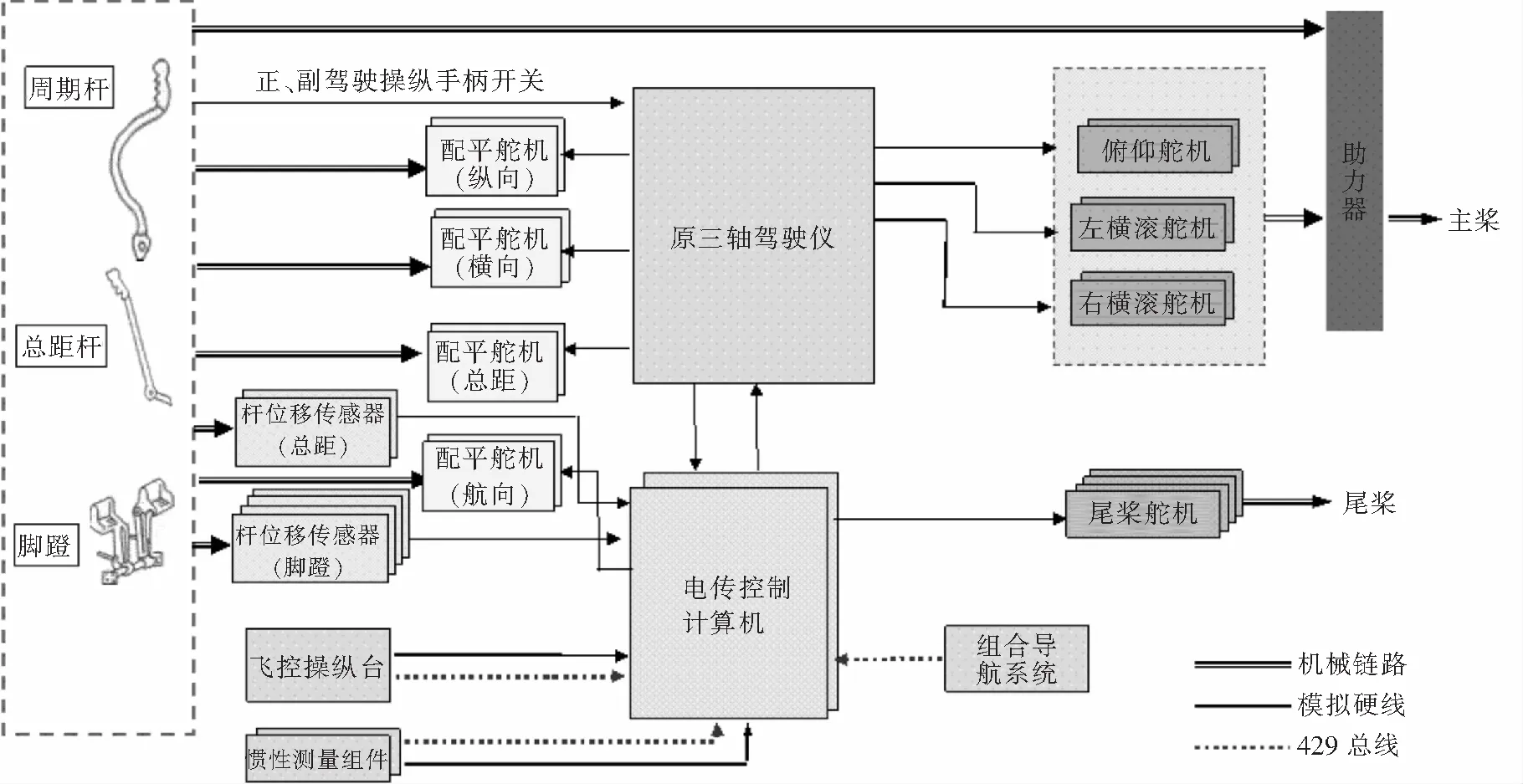
图1 演示验证电传飞控系统原理框图
电传飞控系统分主飞行工作(PFCS)、应急飞控(EFCS)、模拟机械杆系三种方式。正常情况下,电传飞控系统上电则默认进入主飞行工作方式;当出现数字系统三次及以上故障或者飞行员拨动操纵台的应急飞控开关,系统则转入应急飞控工作方式;通过拨动操纵台上的“模拟杆系”开关可以进行主工作模式及模拟机械杆系之间的转换。三种工作方式切换示意见图2。
2 工程模拟器地面试飞验证
2.1 试验目的
工程模拟器地面试飞验证是人在回路的地面飞行仿真试验手段,主要用于开展飞行品质仿真试验、故障及特情仿真试验、试飞科目飞行仿真试验等。工程模拟器仿真试验作为电传飞控系统研制的重要试验环节,可对飞行控制律进行仿真验证评定,并为飞行员体验电传系统特性提供有效手段,与空中试飞形成有效互补[4,5]。

图2 电传飞控系统工作逻辑示意
本试验采用与验证机相一致的座舱操纵显示装置和验证机飞行运动方程模型进行全模拟的飞行仿真验证,主要目的是检查飞行阶段的过渡(巡航、悬停、着陆等)、状态转换、模态转换(PFCS、EFCS)等状态的操纵负荷情况;对飞行控制律改善飞行品质的情况进行仿真评估(飞行试验机动科目包括悬停静稳定性、偏航保持、偏航操纵、平飞静稳定性、协调转弯、预选航向保持等),在工程模拟器上得到经飞行员验证评估的直升机电传飞行控制律。
2.2 试验方法
直升机电传飞控技术工程模拟器飞行仿真试验总结了以往型号试验经验并针对电传飞控系统特点,采取如下试验方法:
1)由控制中心系统完成对试验运行前的初始化设置,管理系统、航电综合显示系统、操纵负荷系统、飞行动力学系统、视景以及音响等系统准备就绪;
2)施加操纵输入,飞行动力学系统依据驾驶员的操纵量进行直升机飞行运动方程解算,并将解算结果通过管理目标机分别发送给视景系统、航电综合显示系统和音响系统;
3)视景系统依据方程解算的直升机位置和姿态进行飞行虚拟景象显示;
4)航电综合显示系统提供仪表显示信息,音响系统提供旋翼及发动机仿真音效;
5)驾驶员通过获得的视景显示和航电显示信息作出进一步的反应,操纵并控制直升机的运动。
通过以上步骤构成人在环的仿真回路,控制中心系统可对试验过程中各系统状态进行监控,同时可对关键数据进行数值或曲线的实时显示,并完成数据记录。
2.3 试验结果
工程模拟器地面试飞验证试验原理框图如图3所示,工程模拟器仿真试验开展了悬停仿真试验、平飞仿真试验、预选航向保持(HDG)仿真等试验,验证直升机航向操纵的飞行品质是否达到ADS-33E飞行品质规范相关要求。

图3 工程模拟器飞行仿真试验原理框图
试验结果评定主要包括对试验数据结果的分析和飞行员主观评价两个部分,其中飞行员的主观评定依据主要参考“库珀-哈珀”飞行品质驾驶员评定要求。部分科目仿真试验数据见图4-图6,飞行员主观评定结果见表1。

图4 悬停仿真试验

图5 平飞静稳定性仿真试验
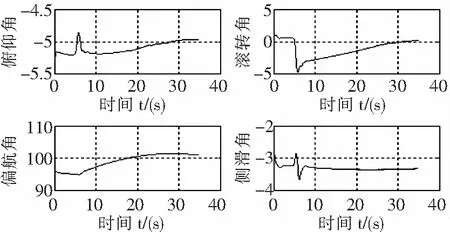
图6 预选航向保持(HDG)仿真试验
从仿真试验数据和驾驶员评定结果可看出,验证机飞行品质满足ADS-33E规范等级1要求,但试验部分数据为数值仿真或模型解算结果,并不能完全反映验证机的真实状态,故控制律参数还需在空中试飞中进行验证和调整。

表1 驾驶员主观评定结果(部分科目)
3 空中试飞验证
工程模拟器仿真试验主要用于系统研发地面验证阶段,但由于模型与真实直升机的特性存在差异,需进行空中试飞验证以最终评价电传飞控系统的工作特性和直升机的飞行品质[6]。
3.1 试飞内容及方法
由于验证机仅加装了航向电传飞控系统,故试飞内容仅验证航向通道的各项性能,包括悬停长试、模拟机械杆系工作模式调整试飞、PFCS工作模式调整试飞,操纵输入的短周期及中长周期响应、航向预选与保持、机动飞行等验证试飞科目。
由于电传飞控系统在国内直升机上应用尚属首次,应用经验不足。为降低风险,试飞采取先易后难,逐步放开系统控制权限的方法进行,主要如下:
1) 验证机验证试飞前,先在与验证机同型号且没加装航向电传飞控系统的直升机上进行试飞和特情科目飞行训练,目的是使飞行员掌握验证机的飞行品质特性及可能由于电传飞行控制系统故障带来的风险的处置措施;
2) 摸清验证机特性之后,在验证机上首先采用系统小权限,由模拟机械杆系工作模式过渡到PFCS工作模式的策略进行调整试飞,根据调整试飞数据进行航向电传飞控系统设计更改和控制律调参;
3) 最后,在系统小权限调整试飞的基础上逐步放大控制增稳权限进行试飞验证。
3.2 试飞结果及分析
在PFCS工作模式下,电传飞控飞行演示验证项目共进行了19架次15h40min的验证试飞,试飞科目包括悬停和前飞人工频率扫描、悬停和前飞中等周期响应、协调转弯、航向预选与保持、模拟杆系和PFCS工作模式下的模拟自转等试飞大纲中规定的所有内容。试飞结果表明:加装航向电传飞控系统后的验证机航向操纵性和稳定性良好,全权限航向控制增稳、航向保持、航向预选与保持系统功能正常;电传飞行控制系统的系统状态转换与申报功能正常,RCDH操纵响应类型等飞行品质指标满足《ADS-33E美国军用直升机飞行品质规范》关于航向飞行品质指标的要求。
ADS-33飞行品质规范中对RCDH操纵响应类型的要求为:“航向保持响应类型,其脉冲响应应如图7所描述的那样[7]。在脉冲输入之后,滚转姿态和航向则必须在10秒内回复到峰值的10%以内或1°,取两者中的较大者。对于等级1,姿态或方向应在规定的范围内保持至少30秒。这一试验中,最大姿态和航向的偏移量应从勉强可感觉到的程度变化到至少10°。”
RCDH操纵响应试飞结果见图8。从试飞结果可知,RCDH操纵响应类型形状,10秒内回落至峰值的10%以内,30秒内基本保持航向角稳定。
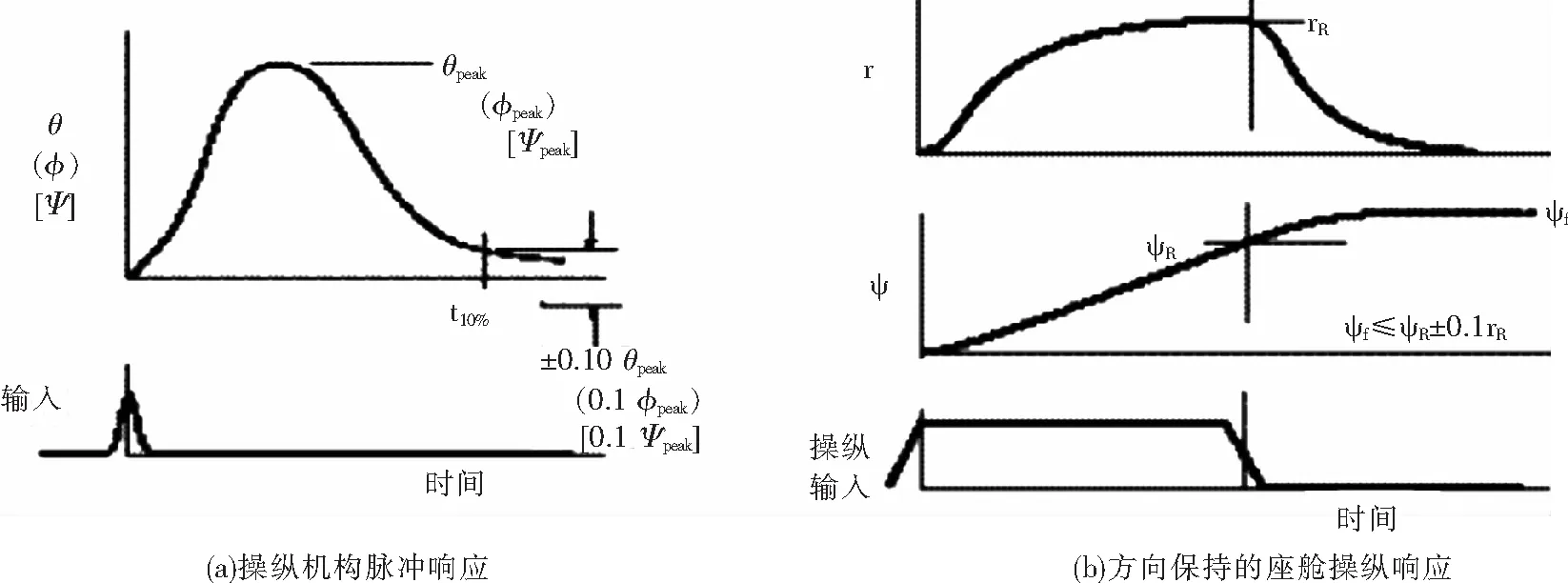
图7 RCDH操纵响应要求
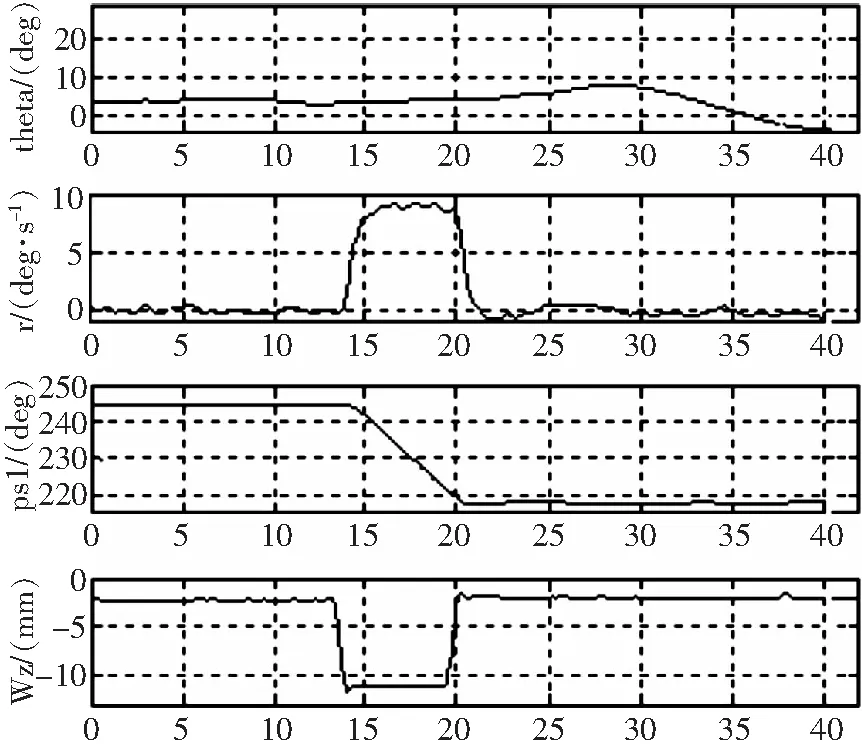
图8 RCDH操纵响应试飞结果
4 地面和空中试飞对比
电传飞控演示验证验证机较传统的直升机最大的一特点是具有RCDH操纵响应类型,本章就验证机空中试飞与地面试飞的RCDH响应品质进行对比分析。
在工程模拟器试验台上和空中试飞中分别进行相同的偏航操作动作(以中速右脚蹬,然后左脚蹬),得出的试飞曲线见图8、图9所示。从图中可看出,两者具有类似的操纵响应特性,试飞结果表明电传飞控系统验证机具有RCDH操纵响应功能。在工程模拟器上,偏航操纵动作结束后偏航角能保持稳定,且稳定精度满足等级1要求。
工程模拟器上运用的模型是理论值,飞行员能够较为轻松地操纵直升机,而在空中试飞中,直升机模型更为复杂,对飞行员的驾驶水平要求更高。从空中试飞曲线可看出,飞行员飞出了较好的RCDH操纵响应品质。
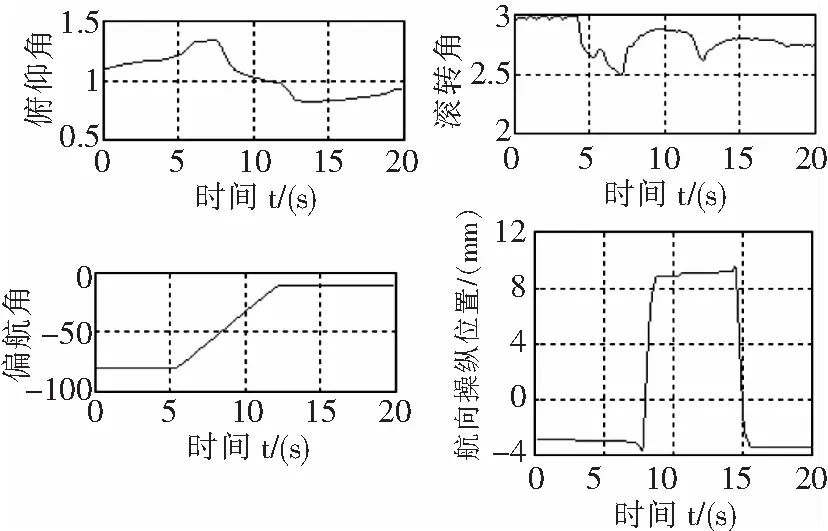
图9 RCDH操纵响应曲线(地面)
5 结 论
加装了电传飞控系统的直升机与装传统飞控系统的直升机最大的区别是能大大地提升飞行品质。本文基于飞行员在工程模拟器及空中试飞的感受,对电传飞控验证机偏航通道的飞行品质进行论证和评述。试飞结果表明,电传飞控验证机满足ADS-33飞行品质规范中的要求,可以为我国直升机电传飞控系统的研发和试飞提供经验和参考。
[1] 王永熙.有人驾驶飞机电传飞行控制系统的研制[C].中国航空学会年会,1999.
[2] 李益瑞.电传飞控系统的功能与关键问题及发展[J].飞行力学,1997.
[3] 王昆玉.直升机飞行控制系统[M].北京:蓝天出版社,1991.
[4] 吴 超.某直升机工程飞行模拟器控制中心的研究与实现[J].计算机仿真,2006.
[5] 朱国民.直升机工程模拟器研究与应用[J].直升机技术,2006(2):36-40.
[6] 田福礼.试飞确定电传飞控系统稳定峪度[J].飞行力学,1999.
[7] ADS-33E美国军用直升机飞行品质规范[S].
Helicopter Flight Test Verification Research based on Fly by Wire Flight Control System
YAO Haizhong1,WANG Zhengwei1,ZHANG Haohua2,LI Bo2
(1.Army Aviation Test Flight Group, Jingdezhen 333001, China;2.China Helicopter Research and Development Institute , Jingdezhen 333001,China)
This paper focused on the verification helicopter installed yaw fly by wire flight control system. Respectively used engineering simulator test and air flight test to analyze and demonstrate flying qualities of the verification helicopter. In addition,analyzed and assessed the typical RCDH operation response qualities.
fly by wire flight control; verification helicopter; engineering simulator; flying qualities
2015-03-06
姚海忠(1973-),男,江苏启东人,本科,主要研究方向:直升机试飞技术。
1673-1220(2015)02-058-05
V249
A
