五相永磁无刷直流电动机最佳切换角选择的研究
2015-02-23程志磊沈业成
程志磊,谢 卫,沈业成,张 帆
(上海海事大学 电气自动化系,上海 201306)
五相永磁无刷直流电动机最佳切换角选择的研究
程志磊,谢卫,沈业成,张帆
(上海海事大学 电气自动化系,上海201306)
摘要:基于matlab建立了五相无刷直流电动机仿真模型,在分析其四四导通方式运行特性的基础上研究了电压切换角的优选方法,以及切换角选择对电机性能的影响。对比分析表明采用最佳切换角能降低定子电流幅值和转矩脉动,提高电机转速。进一步探讨了通过改变切换角来调速的可行性。切换角优选方法对多相电机切换角的选择提供了类似的分析方法。
关键词:五相永磁无刷直流电动机;切换角优选;最佳切换角;仿真建模
0引言
无刷直流电动机既有交流电动机的结构简单、运行可靠、维护方便等优点,又有直流电动机的运行效率高、无励磁损耗及调速性能好等特征,在高性能的伺服驱动及船舶电力等领域获得越来越多的应用。广义的无刷直流电机又分为反电动势为梯形的无刷直流电机和反电动势为正弦的永磁同步电机[1-3]。多相电机以其高性能、高效率及高性价比而应用日益广泛,其控制也成为研究热点[4-5]。
文献[1-2]对五相永磁无刷电动机的各种导通方式进行了研究,得出星形绕组四四导通时绕组利用率较高,电机效率最高。此结论以1台大功率五相永磁无刷电动机四四导通运行方式为研究对象,分析电压切换角的选取对电机性能的影响,从而确定最佳切换角。此方法对多相电机切换角的优选提供了分析方法。
1五相无刷直流电机分析
以四四导通五相星形无刷直流永磁电动机为例进行分析。电机逆变器主电路结构见图1。通过合理的控制策略,可以实现电机的正反旋转。

图1 五相逆变器主电路结构
1.1 电机数学模型
u=u+Ri+Lpi+e
(1)
经变形,可得到电机的状态方程的标准形式:
pi=-L-1Ri+L-1(u-e)
(2)
式中,u、i、e分别为五相的相电压、线电流、感应电动势矩阵;R为五相定子绕组电阻对角矩阵;L为五相定子绕组自感和互感组成的矩阵,L如式(3)所示,其中L为绕组自感,M1为相邻两绕组间的互感;M2为空间相隔4π/5角度的两绕组间的互感;p为微分算子。
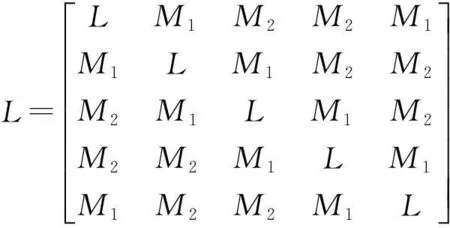
(3)
电机电磁转矩计算公式为:
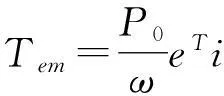
(4)
式中,p0为电机极对数;ω为电角速度,ω= p0Ω;Ω为电机机械角速度。
1.2 相电压分析
设B相绕组轴线为起始方向,顺时针方向为正。设转子轴线方向(即FN方向)与B相绕组轴线夹角为θ,电压切换角为0(也即π/5)。逆变器开关元件视为理想元件。则可确定各相的相电压如式(5)所示。
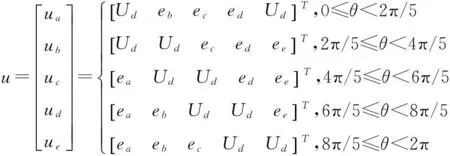
(5)
式中,Ud为直流电源电压;ek(k=a,b,c,d,e)为不导通时的感应电动势,其计算公式如式(6)所示[6]。
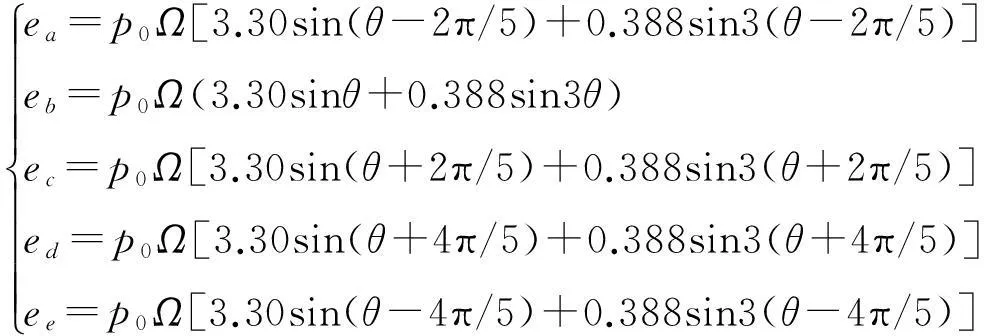
(6)
2最佳切换角选择
2.1 电机运行原理
该电机采用五相星形连接,四相十状态导通方式。设FS为定子绕组合成磁动势,FN为转子永磁体磁动势。设转子初始位置位于B相绕组轴线上,即FN初始方向与B相绕组轴线方向一致,如图2所示。闭合相关IGBT,使A、E两相绕组接通电源正极,C、D两相接通电源负极,则A、E、C、D四相绕组的合成磁动势FS_EACD如图所示。FN和FS相互作用,使转子开始由B相绕组轴线方向按顺时针方向向C相绕组轴线方向旋转。到达切换角时,E相绕组断电,B相绕组通电,A、B、C、D四相绕组的合成磁动势FS_ABCD如图2所示,转子将继续沿顺时针方向旋转。按照表1所示十种通电状态顺序循环导通,电机将沿顺时针方向持续旋转。利用相同的原理可以使电机按逆时针方向旋转。
1.2.3 并存疾病的护理 在患者接受股骨粗隆间骨折期间,患者同样在治疗其他的慢性疾病。护理人员应当根据患者的病情实施具有针对性的疾病护理。

图2 四相导通的磁动势矢量图

表1 四相绕组导通十状态
注:‘+’表示上桥臂导通,‘-’表示下桥臂导通,‘0’表示无桥臂导通。
2.2 切换角选择
如图2所示,设电压切换角为θ,其取值范围为[0,π/5]。
用FN和FS表示电磁转矩为:

(7)

为便于分析比较,将式(7)中的常数项系数看作1,则可简化为:

(8)
在到达电压切换角前瞬间,E、A、C、D四相导通,按式(8)的电机单位电磁转矩为:
t=sin(π/2-θ)
(9)
到达电压切换角后瞬间,A、B、C、D四相导通,按式(8)的电机单位电磁转矩为:
t2=sin(7π/10-θ)
(10)
绘制t1、t2如图3所示。
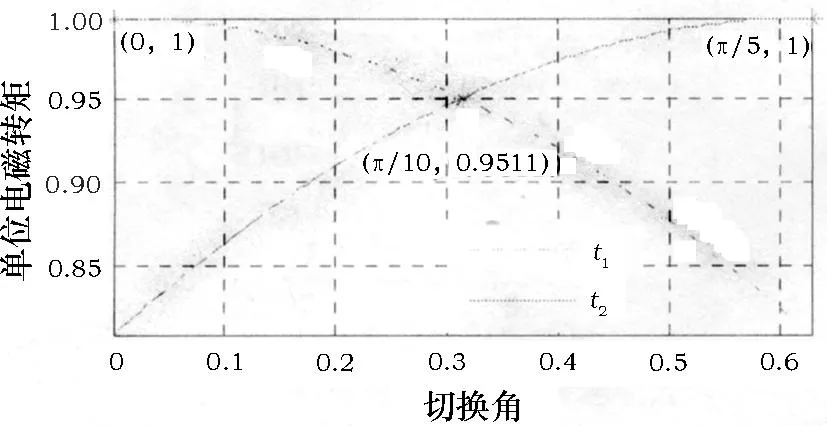
图3 单位电磁转矩比较
分两个典型情形分析:
1)θ1=π/5情形
电机在最大电磁转矩处换相,而在切换前电机电磁转矩已减小到sin(π/2-π/5)倍最大电磁转矩,电机换相过程电机电磁转矩发生陡变,电机电磁转矩脉动较大。
2)θ2=π/10情形
此时为t1、t2的交点。切换过程电机电磁转矩连续变化,电机电磁转矩脉动最小。整个过程电机以较大的电磁转矩连续运行,绕组利用率高。
3仿真分析
3.1 最佳切换角仿真
电机参数如下:额定电压Ud=1 kV,电机极对数p0=6,额定负载TL=100 N·m,转动惯量J=180 kg·m2,定子绕组电阻R=4.5 Ω,定子绕组自感L=50 mH,定子绕组互感M1=4 mH,M2=-1 mH。
采用上述电机数学模型和分析方法,对一大功率五相无刷直流电动机进行仿真分析,如图4所示。
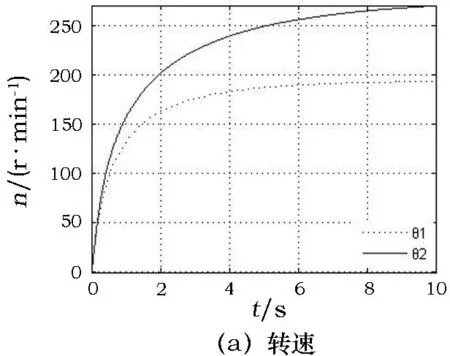
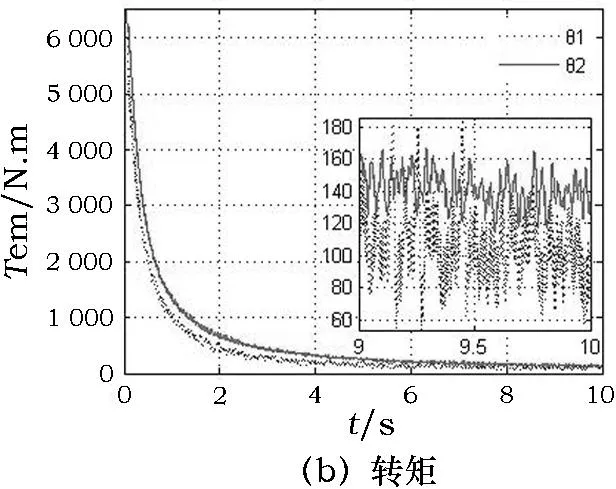
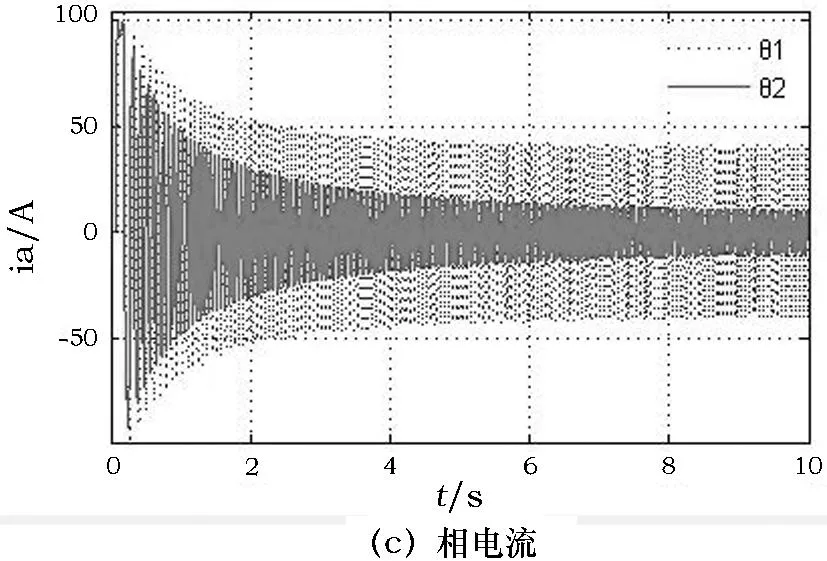
图4 系统响应比较
由图4知,θ3=π/10时电机电磁转矩脉动最小,相电流幅值最小,电机转速达到了260 r/min且未达到稳态。为了达到稳态,将仿真时间延长为30 s,得到的转速响应如图5所示,其稳态转速达到了274 r/min。电机相电流和电磁转矩已基本达到稳态,故未给出其仿真图形。
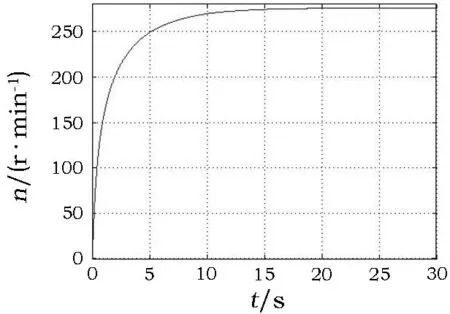
图5 θ3=π/10时电机转速
3.2 降压调速仿真
为了达到与θ1=π/5相近的转速,在θ2=π/10情况下采取降压调速起动,转速响应如图6所示。θ3=π/10、Ud=700 V时电机的电磁转矩和相电流如图7所示。

图6 电机降压起动转速响应

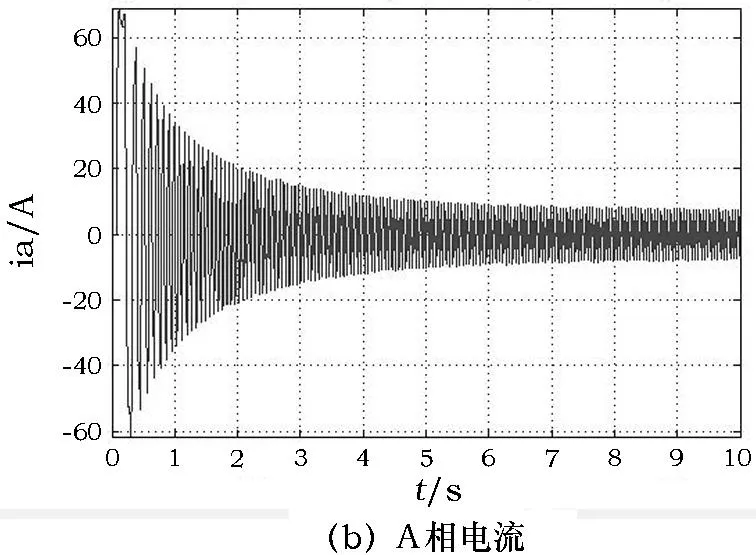
图7 θ3=π/10、Ud =700 V时电机的电磁转矩和相电流
由图6知,当采用降压调速时,转速对电压的变化不敏感,需要较大的电压降幅才能使转速发生可观的改变。θ3=π/10、Ud=700 V时电机的转速与θ1=π/5、Ud=1 000 V时的转速相近,但前者的转矩脉动和电流幅值较小。
3.3 变切换角调速仿真
由图3知t1、t2关于θ=π/10对称。分别取θ3=π/50、θ4=π/20、θ5=3π/20、θ6=9π/50进行仿真,转速响应曲线如图8所示。

图8 变切换角时转速响应比较
由图8可知,相对于θ1=π/5的转速,0<θ<π/5时电机速度都是增大的,且θ越小转速增加量越大,其原理即为弱磁调速(增速)。适当的弱磁能较大的提高电机转速,以满足特定的需要。但θ过小时会造成永磁体的不可逆消磁,这是应该避免的。
4结语
以四四导通五相永磁无刷直流电动机为研究对象,通过对其数学模型的分析得出其最佳切换角为θ=π/10,并在仿真对比中得到了验证。此时电机的电磁转矩脉动和相电流幅值最小,电机稳态转速较大,但这也造成了电机启动时间延长。
在最佳切换角时采取降压调速,Ud=700 V时电机转速与θ1=π/5、Ud=1 000 V时相近,但电机综合性能得到了提高。这一方面反映了电压调速的不灵敏性,另一方面也表明通过改变切换角能较大幅度地调节转速,显示了切换角调速的灵敏性。
参考文献
[1] 谭建成. 永磁无刷直流电机技术[M]. 北京:机械工业出版社,2013.
[2] 谭建成. 多相无刷直流电机绕组连接拓扑结构的分析[J]. 微电机,2012,45(2):1-4.
[3] Kamran Tabarraee, Jaishankar, et al. Comparison of Brushless DC Motors with Trapezoidal and Sinusoidal Back-EMF[J]. IEEE Industrial Electronics, 2011:531-537.
[4] Suman Dwari, Leila Parsa. Fault-Tolerant Control of Five-Phase Permanent-Magnet Motors With Trapezoidal Back EMF[J]. IEEE transactions on industrial electronics ,2011,58(2):476-485.
[5] 刘晨,陈增禄. 多相永磁无刷直流电动机的优势分析[J]. 微电机,2012,45(3):18-21.
[6] 向斌,汪晓燕,谢卫. 船用大功率无刷直流电动机的数学模型及仿真[J].上海大中型电机,2008(2):4-6.
