四轮毂电动机独立驱动电动车转向策略的试验
2015-02-23宋龙龙范满珍
宋龙龙, 郑 培, 范满珍
(1. 内蒙古工业大学 能源与动力工程学院, 内蒙古 呼和浩特, 010051;
2. 山东理工大学 交通与车辆工程学院, 山东 淄博 255000)

四轮毂电动机独立驱动电动车转向策略的试验
宋龙龙1,郑培1,范满珍2
(1. 内蒙古工业大学 能源与动力工程学院, 内蒙古 呼和浩特, 010051;
2. 山东理工大学 交通与车辆工程学院, 山东 淄博 255000)
摘要:根据电子差速技术原理分析计算了四轮毂电动机驱动电动汽车的4个车轮转向时的理论车速;利用永磁无刷直流电动机作为驱动源搭建了电动智能小车,利用该智能小车进行道路行驶实验,对转向理论车速和实验车实际行驶车速进行对比。实验结果表明: 试验车4个车轮的转向车速与前期转向理论的分析结果基本一致,总体误差不超过10%,说明轮毂电机驱动电动车在转向时满足Ackerman转向原理和电子差速技术。
关键词:轮毂电动机; 电子差速; 电动汽车; 转向控制
石油资源的紧缺和环境污染是当前世界所面临的两大问题。发展新能源汽车是缓解资源与环境问题的一条主要路径。作为新能源汽车的纯电动汽车具有零污染、噪声小、能源来源广等优点,故其具有较好的发展前景。
电动汽车采用轮毂电动机驱动技术,摆脱了传统机械传动的设计约束,用线驱动来传递能量源与电动机之间的功率,使得该技术具有以下独特的优势: ① 去掉了机械传动部分,传动效率得到提高,整车质量减轻[3];② 轮毂电动机直接安装在车轮上,大大减小了占用空间,简化了底盘的骨架结构;③ 轮毂电动机技术对各车轮采用制动能量回收系统,提高了汽车能量的利用效率,节约了能源,提高了电动汽车的续驶里程[4]。另外,与一般的单电动机中央驱动型电动车以及内燃机汽车相比,四轮毂电动机独立驱动电动汽车在传动效率、底盘结构和控制性能等方面具有独特的技术优势。
目前,对于纯电动汽车差速转向技术的研究越来越受到重视。文献[1]中针对电动汽车差速问题,提出以驱动电动机转矩指令控制、转速随动的方法实现电动轮系统的自适应差速,并试验验证了电动车具有在不同工况下的实际性能,但是没有提出具体的控制策略。文献[2]中建立转向动力学模型,采用神经网络差速转向转矩综合控制策略,使用仿真软件对不同车速和转向角进行了仿真,证明了该策略可以增加汽车在低转速时的平稳性和操控性。文献[3]中提出了驱动转矩分配控制和横摆角速度反馈控制策略,仿真数据表明,该种策略满足汽车在不同工况下的差速转向。上述文献所涉及的内容虽有差速功能,但是未能验证带轮毂电动机的汽车是否满足Ackerman原理和电子差速技术。本文通过小车模型试验,证明了轮毂电动机独立驱动的电动汽车在转向时符合Ackerman原理和电子差速技术。
1电子差速技术
1.1 电子差速技术原理
电子差速技术是一种完全采用电控方式控制,并通过电子线路的输入来改变各车轮转速,使其以不同速度转动,在转向时保证车轮做纯滚动运行而不发生滑移或滑动现象的差速方式。
具体来讲,只要保证在车辆转向时车轮相对于旋转中心的角速度相等,车轮就不会发生滑移,根据方向盘给定的路面状况和转角,中央处理器计算出车轮所需的实际转速,将左、右车轮需要的转速信号传送给电机控制系统,从而实现两轮之间的差速控制。电子差原理图如图1所示。图中,Rf,in、Rf,out分别为前轴内、外车轮转向半径;Rr,in、Rr,out分别为后轴内、外车轮转向半径;Cr,in、Cr,out分别为后轴内、外车轮轨迹圆的圆长;δin、δout分别为前轴内、外车轮转向角;δ为方向盘转角;Rf和Rr为前、后轴中心转弯半径;vrl、vrr分别为后轴左、右两个车轮的线速度;lf、lr分别为前、后轴到汽车质心的距离;vo为质心速度;CG为汽车质心;df、dr分别为前、后轴左右轮距。
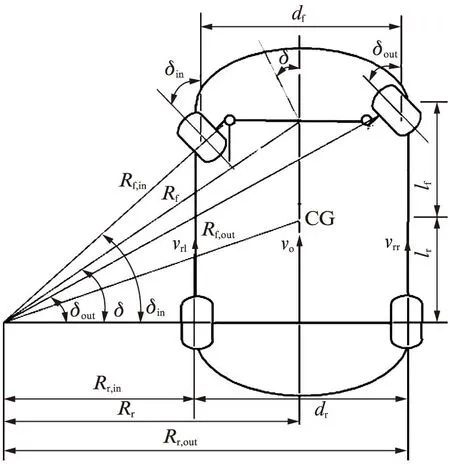
图1 电子差速原理图Fig.1 Diagram of electronic differential principle
当轮毂电动机驱动电动汽车直线行驶时,由于车轮与电动机直接相连,车轮的角速度与电动机转子旋转的角速度相等,即
ωrl=ωrr
(1)
式中,ωrl、ωrr分别为左、右驱动车轮的旋转角速度。
当电动汽车转向时,为方便进行电子差速的原理分析,做以下假设: ① 车体刚性;② 车轮为纯滚动状态;③ 不考虑轮胎侧向变形;④ 不考虑侧向弹性系数的变化。
由图1及其几何关系可得:
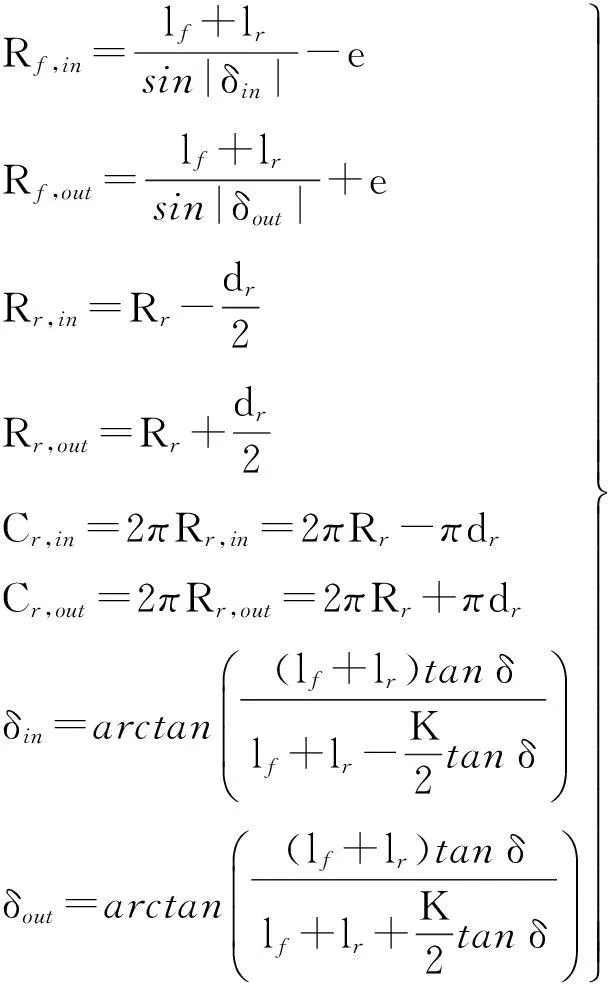
(2)
式中,K为两主轴中心延长线到地面交点间的距离。
汽车在上述假设条件的前提下转向行驶时,4个车轮相对于转向中心的角速度相等,设角速度为ω0,则有以下函数关系:
(3)
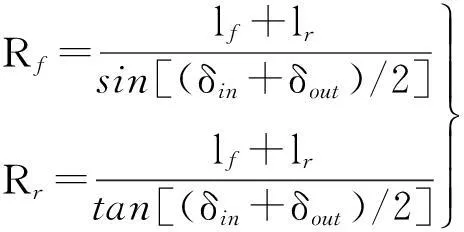
相对于转向中心,整车中心的旋转半径为
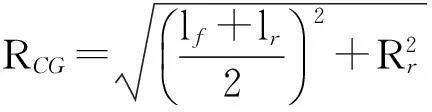
(4)
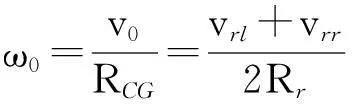
(5)
式中,
vrl=ωr·Rr,in=ωrl·r
vrr=ω0·Rr,out=ωrr·r
上述讨论的转向模型还可简化为更简单的模型,即
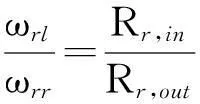
(6)
由该模型看出,内、外侧车轮在车辆转弯时的转速比就是其半径比。
1.2 电子差速总体控制策略
四轮毂电动机驱动电动汽车的电子差速技术是一个复杂的控制过程,需要对4个轮毂电动机同时进行差速计算和速度控制。为达到差速、差力最完美的设计效果,在调压控制策略下,以驱动轮的转矩Td作为控制变量,建立如图2所示的电子差速控制系统。
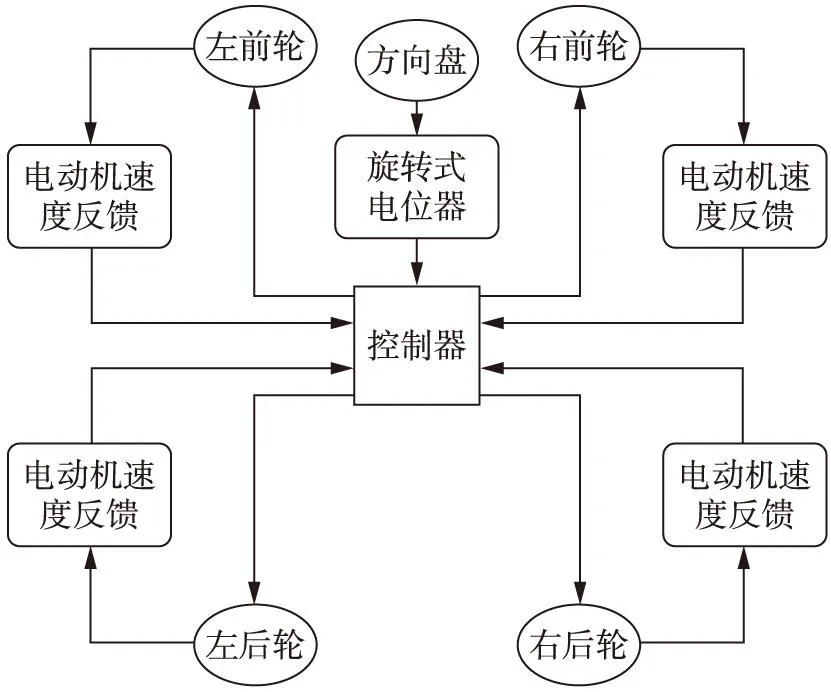
图2 电子差速转向总体控制框图Fig.2 Block diagram of overall control of electronic differential steering
2基于Ackerman的转向原理
Ackerman转向原理简单地说是一门几何科学,它解决了汽车在转弯时内、外转向轮路径指向圆心有所不同的问题[5]。其转向原理如图3所示。
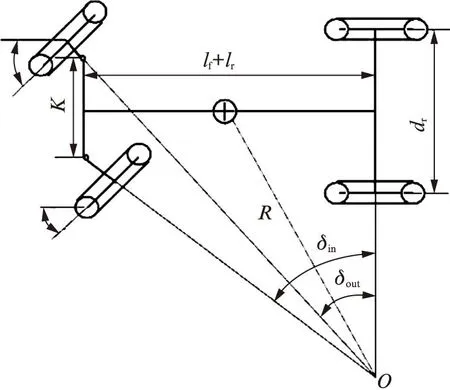
图3 Ackerman转向原理Fig.3 Ackerman steering principle
由Ackerman转向几何可见,电动汽车前面2个转向轮与2个后轮的轴线在汽车处于转向状态时相交于O点,这就是汽车转向时的瞬时转向中心。若假设汽车是一刚体,则汽车上的所有点都将围绕O点为中心做圆周运动,此时,4个驱动轮也将围绕O点做无摩擦的纯滚动运动,此时前面2个转向轮的转角关系为[5-6]
(7)
轮毂电动机驱动电动汽车的四轮差速关系为
ω0=vi/Ri
(8)
式中,vi为汽车第i轮的行驶速度;Ri为汽车第i轮的转向半径;其中,i指前、后轴内、外轮4个车轮;ω0为汽车回转的角速度。
电动汽车在转向过程中,全部车轮都绕图3所述的瞬时转向中心O做圆周运动,以保证所有车轮只有极小地滑移或都处于纯滚动而无滑动的状态。
3试验内容
本文利用由4个永磁无刷直流电动机驱动车轮组成的智能小车来模拟汽车的道路行驶,以验证其转向状态。
3.1 试验车参数
为实现对轮毂电动机电动汽车行驶工况的模拟,并尽量达到真实行驶状态,故选择适合试验小车所需的设备及零部件尤为重要。
3.1.1轮毂电动机的选择在分析了诸多因素后,本次实验选择4个130直流电动机作为模拟小车的轮毂电动机。其主要参数如下: 额定功率为 1.43W;额定电压为3~6V;最高转速为 12000r/min;额定转矩为 1.31N·m;外形尺寸为 70mm×22mm×18mm。
为测出4个驱动轮的车速,分别在4个车轮上安装了编码盘,并使用施密特触发器反相器74HC14(防止临界输出抖动),作为核心器件构成中控电路。测速模块如图4所示。

图4 测速模块Fig.4 Speed test module
3.1.2驱动器和控制器的选择本实验选用的是4个永磁无刷直流电动机,考虑到单片机IO接口只能提供5~10mA电流,不能直接驱动电动机,故使用了一个L298N双H桥直流电动机驱动芯片作为模拟小车的驱动器驱动模块来满足实验要求。驱动器实物如图5所示。
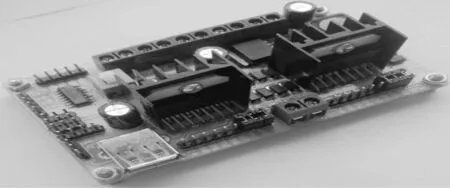
图5 试验用L298N双H桥直流电机驱动器Fig.5 L298N dual H bridge DC motor drives used in the experiment
实验选取主芯片为STC89C52的51单片机作为模拟小车的控制器。该主板体积小,质量轻,方便将编写好的程序直接下载到单片机中。最后,根据实验需求将购置的小车零部件组装起来,实验模拟小车如图6所示。
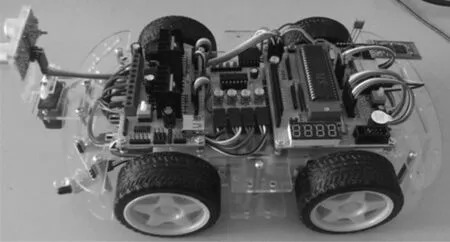
图6 四轮毂电机驱动的电动车实验模拟车实图Fig.6 Diagram of simulated four wheel motor drive electric vehicle used in the experiment
3.2 实验数据分析
使用程序编辑器Keil uVision4编写程序,生成后缀为.hex文件,并下载到单片机中。为验证该模拟电动小车的转向是否满足Ackerman原理以及电子差速原理,实验前,将黑色薄土涂抹在模拟车的4个车轮上,并在实验地面上铺设大篇幅的白色图纸,保证小车的转向印记可以全部留在图纸上,方便精确绘制转向图。实验流程图如图7所示。
考虑到汽车左、右转向是一致的,本文实验只对左转向进行了绘图研究,实验左转向部分过程如图8所示。如图所示,本实验所用模拟车尺寸较小,本文测量及计算得到的数据均为近似值,其中,Rf,in≈395mm;Rf,out≈550mm;Rf≈472mm;RCG≈463mm;两前轮间距dr≈160mm;Rr,in≈380mm;Rr,out≈540mm;前、后轮间距lf+lr≈108mm。
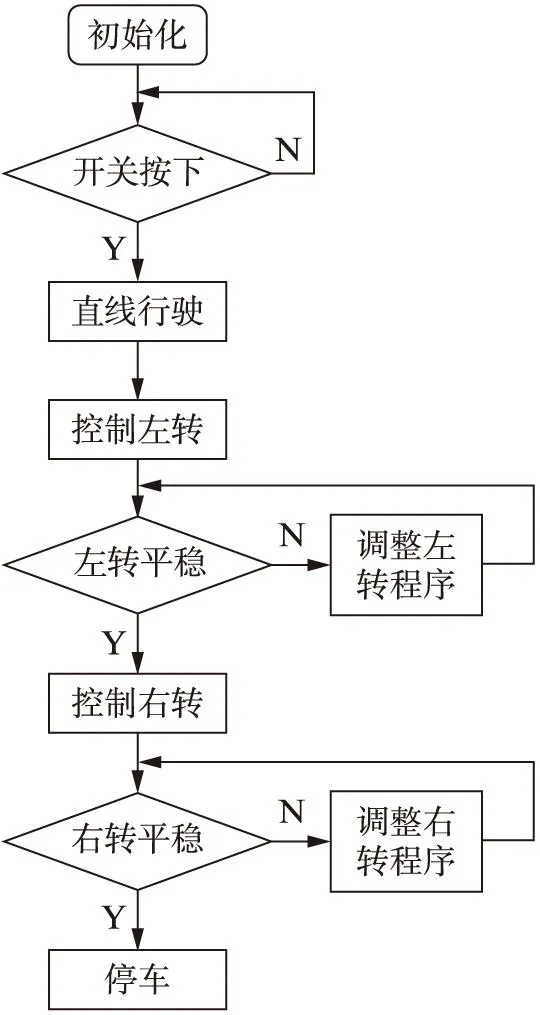
图7 模拟电动车转向行驶实验流程图Fig.7 Flow diagram of experiment process of the simu- lated electric vehicle turning left or right
由试验小车上的数码管显示可知:vfl=341mm/s,vfr=486mm/s,vrl=332mm/s,vrr=471mm/s。
根据测量得到的数据,结合上文关于电子差速工作原理及基于Ackerman的转向原理,可近似计算得到:
Cr,in=2πRr,in=2π×380=2388mm
Cr,out=2πRr,out=2π×540=3393mm
由于本实验在转向时采用的速度v0=440mm/s,即控制器显示屏的速度也就是基准速度,将v0=440mm/s代入式(5)求得

则
vfl=ω0Rf,in=0.95×395=375mm/s
vfr=ω0Rf,out=0.95×550=523mm/s
vrl=ω0Rr,in=0.95×380=361mm/s
vrr=ω0Rr,out=0.95×540=513mm/s
表1给出了4个车轮线速度的理论值与实际值对比。由表1可知,理论计算的数据和试验测出的数据基本吻合,总体误差不超过10%。存在误差的原因主要包括: 测速模块的数码盘灵敏度不够;小车车轮为橡胶的,存在差异等。
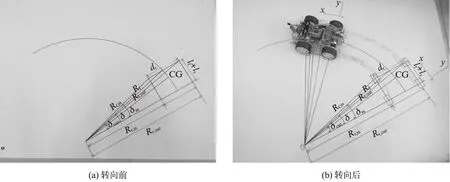
图8 模拟车左转向行驶实验图Fig.8 Diagram of simulated car turning left
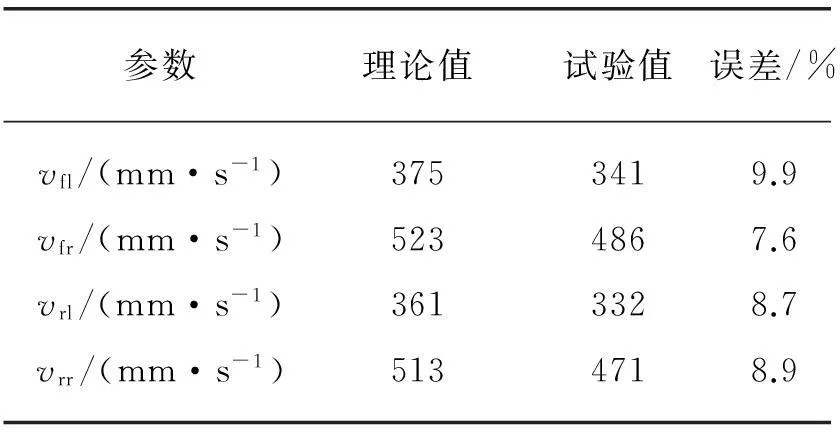
参数理论值试验值误差/%vfl/(mm·s-1)3753419.9vfr/(mm·s-1)5234867.6vrl/(mm·s-1)3613328.7vrr/(mm·s-1)5134718.9
4结语
本文利用电子差速技术原理分析计算了四轮毂电动机驱动电动汽车的4个车轮转向时的理论车速;然后,利用4个轮毂电动机独立驱动的电动智能小车完成模拟道路行驶实验,得出试验车的实际行驶车速;对理论值和实际值进行了比较,结果表明: 两组数据基本吻合,总体误差不超过10%,证明了轮毂电动机驱动电动车在转向时满足Ackerman转向原理和电子差速技术。此方法为今后汽车的开发和设计提供了有力的实践方法,减少了不必要的实车试验操作,降低了成本。
参考文献:
[1]靳立强,王庆年,张缓缓.电动轮驱动汽车差速性能试验研究[J].中国机械工程,2007,18(21): 2632-2636.
[2]翟丽,董守全,罗开宇.四轮毂电机独立驱动车辆转向电子差速控制[J].北京理工大学学报,2010,30(8): 901-905.
[3]王康.电动汽车电动轮驱动系统控制技术的研究[D].武汉: 武汉理工大学,2007: 9-33.
[4]杨养户.电动汽车轮毂电机技术[J].汽车维修,2012(3): 44-47.
[5]Lee J S,Ryo Y J,Lim C,et al.A neural network model of electric differential system for electric vehicle∥Proceeding of Industrial Electronics Society 26 Annual conference of the IEEE.[S.L.]: IEEE,2000: 83-87.
[6]Sun Fengchun,Sun Liqing,Zhu Jiaguang,et al.Simulation study on Synthetic Performance of Electric Vehicles[J].IEEE,2001: 338-342.
[7]唐文武,陈世元,郭建龙.基于BP神经网络的电动车电子差速器设计[J].汽车工程,2007,29(5): 437-440.
[8]严运兵,彭思仑.后驱电动轮汽车电子差速控制影响因素分析[J].汽车工程,2014,36(2): 210-215.
[9]Perez-Pinal F J,Cervantes I,Emadi A.Stability of an electric differential for traction applications[J].IEEE Transactions on Vehicular Technology,2009,58(7): 3224-3233.
[10]谭国俊,钱苗旺,赵忠祥,等.双电机独立驱动电动车辆电子差速控制[J].微特电机,2009(6): 33-36,52.
[11]喻厚宇,黄妙华,张振国.电动轮车电子差速控制的试验研究[J].武汉理工大学学报,2011,33(5): 147-151.
[12]Mi C,Lin Hui,ZhangYi.Iterative leaning control of antilock braking of electric and hybrid vehicles[J].IEEE Transactions on Vehicular Technology,2005,54(2): 486-494.
[13]孟磊,叶世伟.基于永磁同步电机的电动轮仿真方法研究[J].计算机仿真,2011,28(5): 337-341.
[14]Tabbache B,Kheloui A,Benbouzid M E H.An adaptive electric differential for electice vehicles motion stabilization[J].IEEE Transactions on Vehicular Technology,2011,60(1): 104-110.
Experimental Research of Steering Strategy ofIndependent Drive Electric Vehicles with Four In-Wheel Motors
SONGLonglong1,ZHENGPei1,FANManzhen2
(1. College of Energy and Power Engineering, Inner Mongolia University of Technology,
Hohhot 010051, Inner Mongolia, China; 2. Department of Transportation and Vehicle
Engineering, Shandong University of Technology, Zibo 255000, Shandong, China)
Abstract:The theoretical speed of four wheels in an electric vehicle driven by four in-wheel motor is analyzed and calculated based on the electronic differential principle. An electric intelligent vehicle was built, with a permanent magnet brushless DC motor as the driving resource. Road tests were carried out to get the actual driving speed, and then compared with the steering theoretical speed. Experimental results show that the four wheels steering speed of the test car agrees with the analysis results, with the total error less than 10%. Therefore the in-wheel motor drive electric vehicle meets Ackerman steering principle and the electronic differential technology when steering.
Key words:in-wheel motor; electronic differential; electric vehicles; steering control
文献标志码:A
中图分类号:U 469.72
文章编号2095 - 0020(2015)06 -0331 - 06
作者简介:宋龙龙(1986 -),男,硕士生,主要研究方向为纯电动汽车的控制策略,E-mail: sll0539@163.com
收稿日期:2015 - 08 - 26
