基于应答器位置测量的AUV非线性模型预测对接控制
2015-02-22高剑刘昌鑫
高剑, 刘昌鑫
(西北工业大学 航海学院, 陕西 西安 710072)
基于应答器位置测量的AUV非线性模型预测对接控制
高剑, 刘昌鑫
(西北工业大学 航海学院, 陕西 西安710072)
摘要:针对搭载超短基线(USBL)声学定位系统的全驱动自主水下航行器(AUV)的自主回坞控制问题,提出一种基于应答器位置测量的回坞预测控制算法。首先用体坐标系下的应答器位置测量定义回坞对接误差,基于Jacobian矩阵描述应答器位置测量与AUV速度之间的运动学关系,建立非线性对接误差模型。采用非线性模型预测控制求解对接控制问题,产生航行器速度指令。然后设计自适应速度控制器实现对速度指令的全局渐近跟踪。最后采用REMUS AUV的模型参数进行了仿真研究,结果验证了方法的有效性。 《国际航空空间》(International Aerospace Abstracts,简称IAA)
关键词:自主水下航行器;对接;逆USBL定位系统;模型预测控制;自适应控制系统
自主水下航行器(autonomous underwater vehicle, AUV)是人类探索海洋的重要工具,AUV与水下回收平台的对接问题是迫切需要研究解决的关键技术之一。一方面,受体积与质量限制,AUV执行任务时所携带的能源十分有限,为实现水下长期工作,需要在水下进行能量补充。另一方面,AUV在水下执行复杂任务时,需要与水下平台进行信息交换,实现任务信息的上传与任务使命下载。因此,水下对接是保证AUV水下长时间续航和执行复杂作业的前提[1]。
定位是水下回收对接关键问题之一,超短基线(USBL)声学定位系统体积小定位精度高,已广泛应用于回收对接系统的设计中。Woods Hole海洋研究所的Odyssey-IB和REMUS、美国NOSC的free-swimmer和日本川崎重工的marine-bird上都选用了USBL为水下对接系统提供高精度水声定位[2]。
在回坞控制方面,蒙特利海洋研究所[3]对Dorado/Bluefin AUV的回坞对接进行了研究,将回坞对接过程分为回坞和对接2个阶段,在回坞过程中,AUV利用自主导航能力进入USBL定位区域,对接阶段在USBL校准下,采用横向跟踪控制沿对接路径进入回收站。Jantapremjit等[4]采用长基线(LBL)声学定位系统,使用基于人工势场方法的平均矢量场规划AUV回坞路径。其中在回坞阶段,采用传统人工势场法计算一条无碰航路到达对接准备点,对接阶段则通过对地标矢量切换加权,导引AUV到达对接所要求的方位和位置。Batista等基于USBL定位系统提出一种集成式导航控制律[5],获取固定在对接站上应答器位置后,将全局坐标系下的航向偏角和AUV与回坞路径的侧向距离作为对接误差,并采用Lyapunov方法设计鲁棒控制律使系统误差的收敛到零,保证了系统的稳定性,但稳定性证明复杂并且未考虑过程约束。
本文针对安装2个USBL定位应答器的回坞对接平台,不同于Batista等采取的全局坐标系下的误差定义方式,在体坐标系下直接使用应答器测量定义对接误差,并采用非线性模型预测控制(model predictive control, MPC)计算满足系统约束的速度指令。针对未知海流扰动和动态模型中的未知参数采用自适应跟踪控制使AUV能够全局渐近跟踪速度指令。仿真结果验证了对接策略的有效性。
1对接系统与AUV模型
对接系统如图1所示,2个USBL应答器B1和B2分别固定在对接站左右两侧,AUV通过USBL定位系统来测量应答器相对AUV的位置。定义2个坐标系来描述AUV的运动:全局坐标系Oxy与体坐标系OBxByB。其中全局坐标系的原点为B1B2的中点O,x轴沿入坞方向,y轴与x轴垂直。体坐标系固连于AUV,原点为浮心,坐标轴xB与yB的指向分别沿轴向和右侧向。

图1 AUV对接系统示意图
建立如下的全驱动AUV的运动学模型与动力学模型[6]:


(1)
(2)
式中,(x,y)与ψ分别为全局坐标系下航行器的位置坐标与航向角,u、v与r分别为体坐标系下航行器的线速度与航向角速度。m11、m22、m33为包含附加质量的惯性系数,d11、d22和d33为阻尼系数,X、Y和N为控制力和力矩,Xc、Yc和Nc为海流干扰力和力矩。本文考虑AUV具有独立的速度控制,仅通过调整侧向速度和航向角速度进行对接控制。
在AUV靠近对接站的过程中,AUV通过USBL定位系统获取应答器在体坐标系中的位置,表示为:
(3)

对接过程中AUV处于全驱动航行模式,系统的对接控制目标是使得AUV沿着期望的对接路径航行直至抵达对接站。
2模型预测对接控制设计
2.1模型预测控制
模型预测控制具有优异的约束处理能力和对复杂过程的适应性,在控制领域特别是工业控制领域得到了广泛应用。MPC基于系统模型预测一定时域内的系统状态,使用最优化方法优化系统状态轨迹并求取当前时刻的控制输入,MPC在机器人[7]、无人机[8]和水下航行器[9]控制领域得到了广泛应用。
预测控制是在每一时刻(k)求解如下优化问题:
(4)
优化问题满足:
(5)

2.2对接控制模型
对接预测控制器所求取的优化问题是在一定预测时域里某一运动学状态的代价函数的最小化,本文考虑的预测对接控制器将运动学误差定义在航行器体坐标系,避免了通过复杂的几何方程求解全局误差。
首先,将AUV应答器位置测量方程式(3)对时间求导:
(6)
值得注意的是和基于图像的视觉伺服控制一样,在上述运动学方程中没有全局坐标系下的坐标与航向角项。
考虑到回坞对接需要航行器沿着对接路径航行直到到达对接站,在AUV体坐标系中定义对接误差,即在航行过程中需满足:

(7)
2.3预测对接控制器
为了设计运动学非线性预测控制器,动态方程(6)可用欧拉法近似成如下离散形式:
(8)

(9)
式中,Qj和Rj为预测过程中第j步的对称正定权值矩阵,ej|k和vj|k分别表示从时刻k根据系统模型(8)预测的第j步的系统误差与输入。
在求解优化问题时,根据实际AUV运动特性定义如下约束:
1) 输入约束
v∈[vmin,vmax]
(10)
2) 可见性约束
为了保证在回坞过程中,AUV总是能成功获取应答器的位置,定义满足USBL定位系统的可见性约束如下:
i=1,2(11)
式中,αmax是USBL定位系统最大角度。

参考文献证明:[10],考虑标量优化代价函数值在k时刻的优化值为Lyapunov函数:
(12)
(13)

(14)
3非线性自适应速度跟踪控制器
采用非线性自适应控制[11]以保证AUV存在模型误差的情况下能够跟踪速度指令。为了确保跟踪误差的渐近稳定性引入误差的积分项。
定义速度跟踪误差:
ξ=(v-vd)+Λ∫(v-vd)dt=v-vr
(15)
对(15)式求导并将(2)式代入

定义正定Lyapunov函数,
(17)
对V1求导得到,
(18)
(19)

为了设计自适应控制律,定义新的Lyapunov函数。
(20)

(21)
取自适应律
有下面的定理:
定理2考虑存在参数不确定性影响下的AUV动力学模型(2),在控制律(19)及自适应律(22)的作用下,速度跟踪误差全局渐近稳定。

4仿真研究
采用REMUSAUV的模型参数对本文所提出的对接控制策略进行仿真验证,REMUS参数见表1。

表1 REMUS参数

图2 AUV航行轨迹 图3 对接误差曲线图4 对接误差曲线
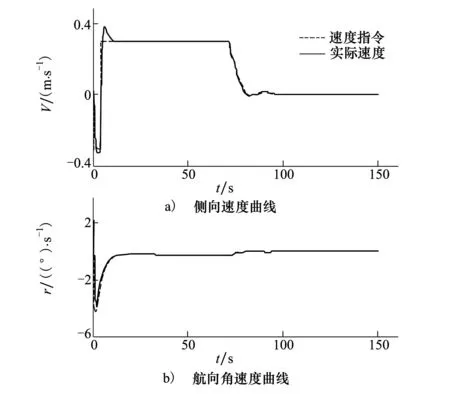
图5 预测对接速度指令与实际速度曲线
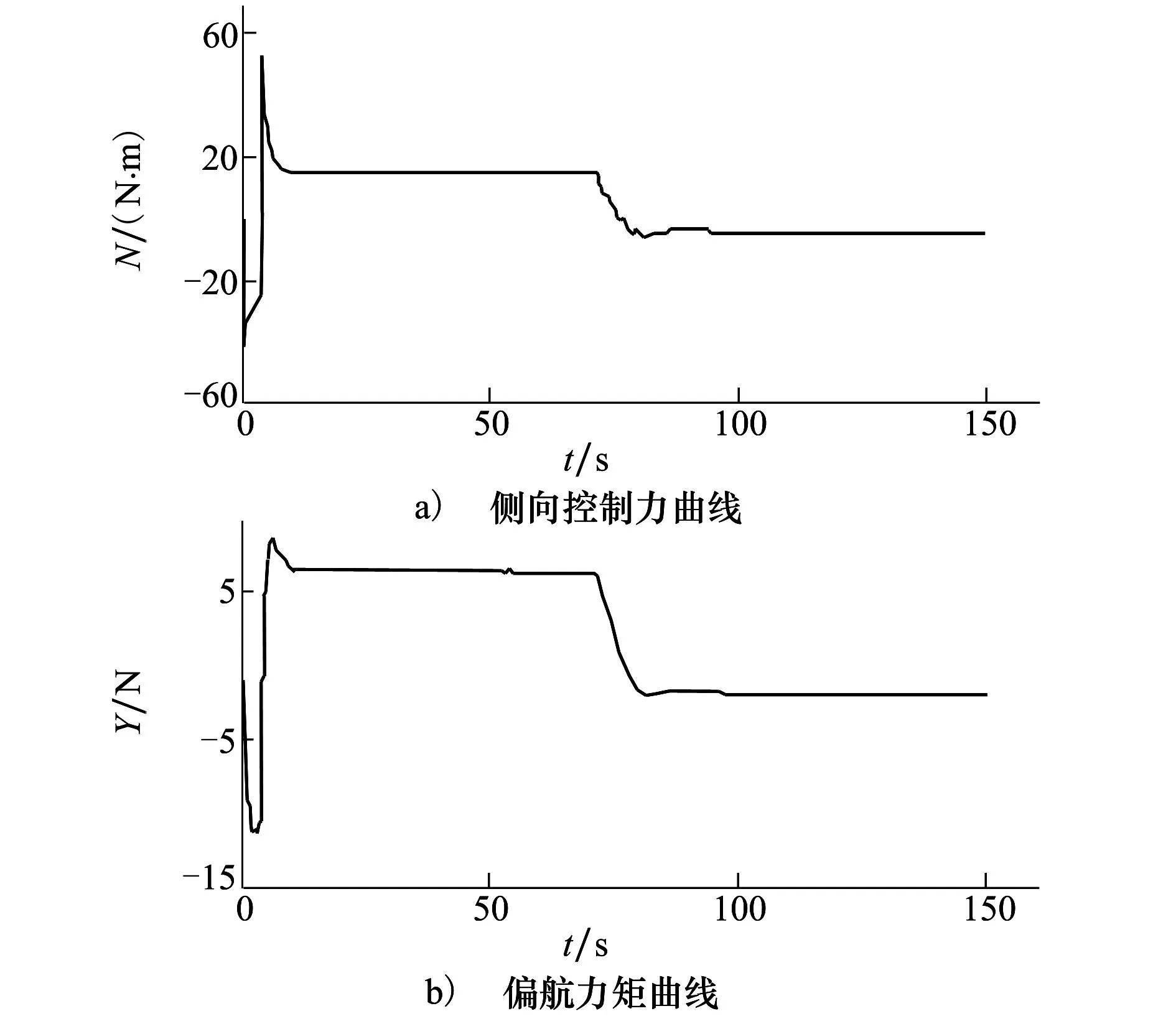
图6 预测对接控制输入曲线
预测对接控制下AUV航行速度曲线、控制输入和航向角曲线分别如图5、图6和图7所示,回坞预测控制器约束了AUV的航行速度,使其满足AUV的驱动能力。反演自适应速度跟踪在存在参数不确定性时具有良好的速度跟踪性能。

图7 航向角曲线
5结论
本文针对搭载USBL声学定位系统的全驱动AUV,提出一种新的回坞对接控制策略。直接使用声学应答器在体坐标系下的坐标来定义对接误差,采用了非线性模型预测控制,在满足过程约束时获取优化速度指令,并设计自适应跟踪器全局渐近跟踪速度指令。仿真结果验证了回坞对接策略的有效性,比传统的反演设计具有更优的性能。
[1]PodderT,SibenacM,BellinghamJ.AUVDockingSystemforSustainableScienceMissions[C]//ProceedingsofIEEEInternationalConferenceonRoboticsandAutomation, 2004: 4478-4484
[2]燕奎臣, 吴利红.AUV水下对接关键技术研究[J]. 机器人, 2007, 29(3): 267-273
YanKuichen,WuLihong.ASurveyontheKeyTechnologiesforUnderwaterAUVDocking[J].Robotics, 2007, 29(3): 267-273 (inChinese)
[3]McEwenRS,HobsonBW,McBrideL,BellinghamJG.DockingControlSystemfora54-cm-Diameter(21-in)AUV[J].IEEEJournalofOceanicEngineering, 2008, 33(4): 550-562
[4]JantapremjitP,WilsonPA.OptimalControlandGuidanceforHomingandDockingTasksUsinganAutonomousUnderwaterVehicle[C]//Proceedingsofthe2007IEEEInternationalConferenceonMechatronicsandAutomation, 2007: 243-248
[5]BatistaP,SilvestreC,OliveiraP.ATwo-StepControlApproachforDockingofAutonomousUnderwaterVehicles[J].InternationalJournalofRobustNonlinearControl, 2014, 25(10): 1528-1547
[6]FossenTI.MarineControlSystems:Guidance,NavigationandControlofShips,RigsandUnderwaterVehicles[M].Trondheim,Norway:MarineCyberneticsAS, 2002: 5-54
[7]MaurovicI,BaoticM,PetrovicI.ExplicitModelPredictiveControlforTrajectoryTrackingwithMobileRobots[C]//Proceedingsofthe2011IEEE/ASMEInternationalConferenceonAdvancedIntelligentMechatronics, 2011: 712-717
[8]DauerJ,FaulwasserT,LorenzS,FindeisenR.Optimization-BasedFeedForwardPathFollowingforModelReferenceAdaptiveControlofanUnmannedHelicopter[C]//ProceedingsofAIAAGuidance,NavigationandControlConference, 2013
[9]MoleroA,DuniaR,CappellettoJ,FernandezG.ModelPredictiveControlofRemotelyOperatedUnderwaterVehicles[C]//Proceedingsofthe50thIEEEConferenceonDecisionandControlandEuropeanControlConference, 2011: 2058-2063
[10]MayneDQ,RawlingsJB,RaoCV,ScokaertPOM.ConstrainedModelPredictiveControl:StabilityandOptimality[J].Automatica, 2000, 36(6): 789-814
[11]SlotineJJE,LiW.AppliedNonlinearControl[M].Prentice-Hall, 1991: 350-353
[12]GaoJ,LiuC,WangY.BacksteppingAdaptiveDockingControlforaFull-ActuatedAutonomousUnderwaterVehiclewithOnboardUSBLSystem[C]//OCEANS′14MTS/IEEE, 2014: 1-6

2015年前8个月按IAA类别收录的内容介绍在40行以上的篇数情况
每篇论文都有IAA类别,下表给出2015年前8个月(上半年及7月、8月)的11个IAA类别的2015年前8个月情况:

IAA期篇数IAA类别上半年20157月20158月2015前8个月Geosciences(General)100111SpaceSciences(General)80311MeteorologyandClimatology4105Geophysics3104Oceanography3003EarthResourcesandRemoteSensing2103Astronautics2002Astrophysics2002EnvironmentalPollution1001General1001AircraftPropulsionandPower0011
胡沛泉
2015年10月
Nonlinear Model Predictive Docking Control for an AUV with
USBL Position Measurements
Gao Jian, Liu Changxin
(College of Marine Science and Technology, Northwestern Polytechnical University, Xi′an 710072, China)
Abstract:The docking control problem is investigated for a fully-actuated autonomous underwater vehicle (AUV) equipped with an inverted ultra-short baseline (USBL) positioning system. A novel docking control strategy is proposed, in which the docking error is defined by the coordinates of the fixed USBL transponders. The interaction matrix relating the transponders′ measurements to the vehicle′s linear and angular velocities is derived to predict the future system errors. Based on this, a nonlinear model predictive controller (MPC) is designed to generate the velocity command for the vehicle, which minimizes the predictive errors in a limited horizon. The nonlinear adaptive control is utilized to track the velocity command with an asymptotically stable performance. The effectiveness of the docking method is demonstrated with the simulation studies using the REMUS AUV model.
Key words:autonomous underwater vehicles, docking, inverted USBL positioning system, model predictive control, adaptive control systems
中图分类号:TP24
文献标志码:A
文章编号:1000-2758(2015)05-0860-07
作者简介:高剑(1979—),西北工业大学副教授,主要从事自主水下航行器运动控制、视觉伺服控制等研究。
基金项目:国家自然科学基金(51279164)资助
收稿日期:2014-11-04
