环境干扰力作用下船舶操纵运动仿真数学模型研究
2015-02-22梁海军闫超
梁海军,闫超
(河北工业职业技术学院,河北石家庄050091)
环境干扰力作用下船舶操纵运动仿真数学模型研究
梁海军,闫超
(河北工业职业技术学院,河北石家庄050091)
摘要:为研究外界干扰因素对船身运动的影响,本文假设船舶航行环境中是小幅度波浪,船身摆动不是剧烈晃动。水流载荷采用切片理论进行计算,船身为一细长结构。以此为基础,建立基于船身局部坐标系的船体运动微分方程,并将其投射至全局坐标系。基于Matlab的Simulink工具对船舶运动微分方程进行计算,结果与现有文献结果较为一致,本文建立模型能够较好地反映外界干扰对船体运动的影响规律。
关键词:干扰力;船舶操纵; Matlab;运动仿真
Research on mathematical model of the ship maneuvering and environmental interference force and its simulation
LIANG Hai-jun,YAN Chao
(Hebei College of Industry and Technology,Shijiazhuang 050091,China)
Abstract:In order to study the impact of interference from outside interference factors on the hull movement,we assume navigational environment is small amplitude waves,the boat is not rocking violently shaking.Load flow calculation using the slice theory,the hull is regarder as an elongated structure.Based on this,the differential equations of the hull motion is then established base on the local coordinate system,and it is finally projected to the global coordinate system.The differential equations of the hull motion is calculated based on the Matlab Simulink tool,and the result is consistent with the results of the existing literature,the model established in this paper can better reflect the influence of outside interference hull movement.
Key words:disturbance force; ship handling; Matlab;motion simulation
0 引言
船舶模拟器主要用于在计算机上实现船舶航行过程的模拟,在船员教育培训中具有重要作用。目前使用的航行模拟器主要包含2个部分,一部分是软解操作界面,主要有各种仪表盘、操作按钮构成;另一部分为软件核心,即船舶运动模型求解部分。然而,目前绝大多数的船舶模拟器的模拟功能相当有限,主要是船舶运动模型只是描述船舶平动以及俯仰运动,相对而言不真实,在实际模拟中效果较差。船舶实际航行过程中,很多时候是在波浪冲击下运动,波浪干扰对船舶运动的影响研究较少。
关于船舶运动模型,目前已有大量研究文献研究:夏志平等[1]建立船体横摇运动数学模型,并结合试验研究,对不同吃水深度下的船身横摇运动规律进行研究。该模型只考虑了吃水深度对船体耐波性的影响,但是并没有考虑波浪力对船舶偏航的影响。马洁等[2]基于自回归时间序列分析方法,对船舶纵摇运动进行预报研究。并将预报结果与仿真计算结果进行对比研究,取得较好的效果。其仿真模型主要考虑了船身纵摇运动,外界干扰的影响并未
在预报程序中进行考虑。杜佳璐等[3]为实现对船舶运动进行实时控制,首先建立了船体横摇与纵摇运动数学模型,并将其与非线性控制数学模型相结合,实现了闭环控制。其实际应用效果有待进一步验证。也有部分学者集中于讨论外界干扰与船体运动的关系,但主要是采用船身运动数据对外界干扰进行估计,如赵大威等[4]提出了一种利用船舶自身运动数据估计海浪参数的方法。该方法主要借助AR算法对船舶运动进行交叉运算,然后采用遗传优化算法对海浪方向进行优化研究。最终,结合相关试验研究,证明该方法具有较好的有效性。该方法能够为船舶运动微分模型提供可靠的计算边界条件。张显库等[5]为了考虑外界冲击对船舶运动的影响,建立了一种响应型非线性船舶运动数学模型。该模型能够在特性的输入下获得船身运动响应,因此基于该数学模型,建立外界干扰力的数学模型,并将其作为非线性船舶运动数学模型的输入,以此来获得船舶的运动响应。赵希人等[6]为了对船舶运动过程中的摆动进行实时控制,建立了船舶运动数学模型用于返回船身纵向运动响应,并基于中心差分理论以及相应的振动控制理论对船舶运动进行控制,但计算精度较差,相对误差为10%。上述研究表明,若不考虑船舶运动过程中的外界干扰,则模型的预报精度较差。因此很有必要对外界干扰进行考虑,建立船身运动-外界干扰相互集成的数学模型进行研究,以获得较好的计算模拟效果。
1 数学模型建立
为了建立船身运动模型,首先对数学模型做如下假设:
1)船舶航行环境中波浪幅度较小,船身摆动不剧烈。
2)水流载荷采用切片理论进行计算,船身为一细长结构。
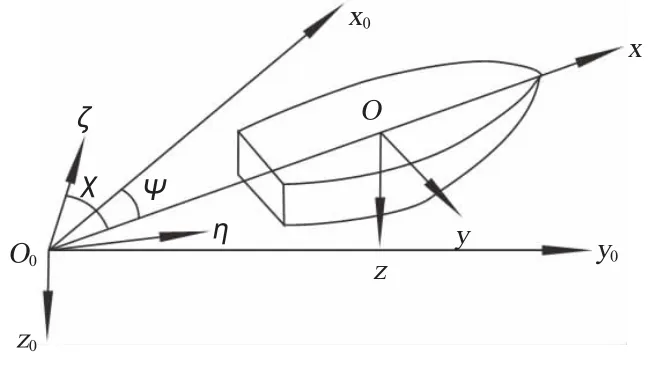
图1 船身坐标系Fig.1 Hull coordinates
本文建立数学模型时,基于图1所示坐标系约定。船身坐标系与绝对坐标系的转化关系为:

波浪表面可采用如下模型进行描述:

其中a为波浪高度。

式中:λ为波浪长度; k为波浪数量,采用如下方程计算:

式中: w为波浪与船体相互作用频率。

其中T为波浪运动周期,计算公式可以根据经验公式:

船身局部受到波浪的干扰力为:

船身受到的干扰力矩为:

则,船身纵摇与升沉运动采用如下模型控制:
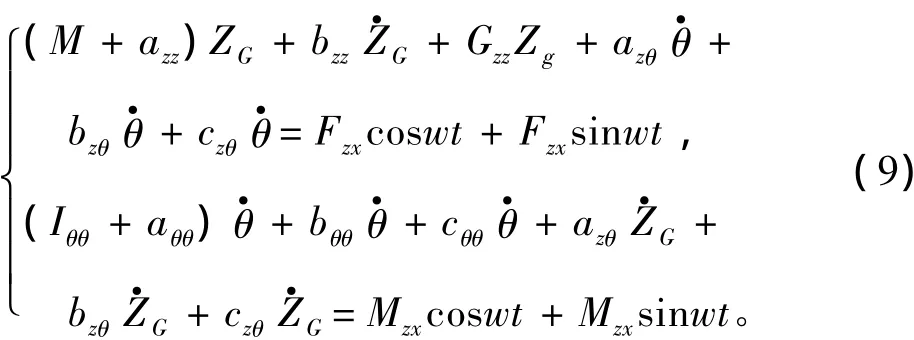
式中: w为波浪与船身相互作用频率; Iθθ为船身转动惯量; M为船身总质量; zG为船舶在z轴方向升沉量;θ为纵摇角度。
船身与水流接触部分压力为:

为了便于后续积分计算,将式(10)转化至船身局部坐标系进行讨论:

则船舶航行过程中波浪总干扰力为:

船身受到的总力矩为:

式中: s为船身与水流接触面积; n为船身各点处法向量。
由于水流与船身表面直接接触,为了对船体外表面进行积分,式(12)~式(13)可以通过投影的方法投射值船体表面,则船体表面作用力可以表示为:

力矩采用下式进行积分变换:

式中τ为船身在水下的部分体积。
船身在水下深度越大,则压力越大,压力控制方程为:

将上述各式代入式(9)可得船身作用力:

力矩为:

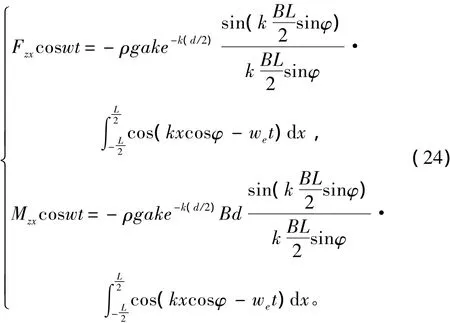
由于船身结构为复杂的曲面结构,为了计算方便,本文假设船身宽度以及截面积不随吃水深度变化,则A(x)与B(x)可以作为常数L和B进行考虑,则式(17)和式(18)可表示为:

式中we为波浪频率。
式中:φ为浪倾角; v为船舶运动速度。
2 计算实例
本文以“育龙号”轮船为实例进行计算,计算首先要获得船体浮心位置,本文采用常用的经验公式进行计算:

本文将船身划分为21个剖面,则各系数计算公式为:
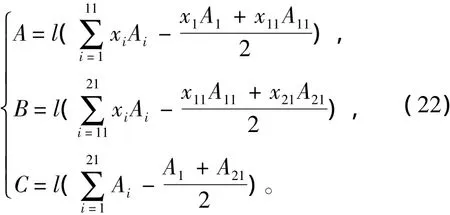
式中: l为各截面之间的距离; i为各截面编号;各截面面积Ai均为已知; xi为各截面与船身几何中心距离。
本文采用Matlab的Simulink工具对上述微分方程进行计算,如图2所示。其中,Embeded Matlab Function为内嵌式Matlab编程语言,其函数为:

其中:
设置计算时间为100 s,采用龙科库塔法进行差分计算,船体在z轴方向升沉角变化如图3所示,
船身纵摇角度变化如图4所示。结果表明,本文计算出的船体运动参数变化趋势与幅值与现有文献较为相似,因此本文建立的船体运动微分方程合理。

图2 SIMULINK微分方程Fig.2 SIMULINK differential equations

图3 船身升沉Fig.3 Hull heave
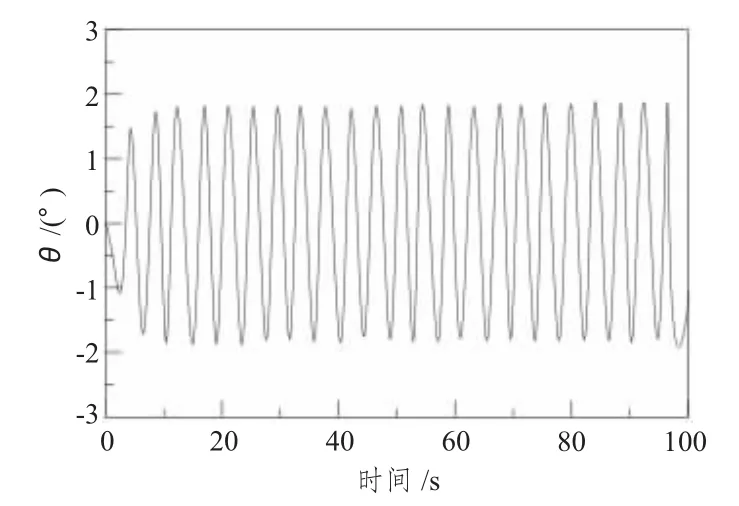
图4 纵摇角Fig.4 Pitching angle
3 结语
1)为了研究外界干扰因素对船身运动的影响,本文假设船舶航行环境中是小幅度波浪,船身摆动不是剧烈晃动。水流载荷采用切片理论进行计算,船身为一细长结构。以此为基础,建立了基于船身局部坐标系的船体运动微分方程,并将其投射至全局坐标系。
2)基于Matlab的Simulink工具对船舶运动微分方程进行计算,结果与现有文献结果较为一致,本文建立的模型能够较好地反映外界干扰对船体运动的影响规律。
参考文献:
[1]夏志平,文逸彦,杨松林,等.新型三体船横摇运动模式分析[J].舰船科学技术,2014,36(2) :33-36,59.XIA Zhi-ping,WEN Yi-yan,YANG Song-lin,et al.Analysis of roll motion mode of new trimaran[J].Ship Science and Technology,2014,36(2) :33-36,59.
[2]马洁,韩蕴韬,李国斌,等.基于自回归模型的船舶姿态运动预报[J].舰船科学技术,2006,28(3) :28-30.MA Jie,HAN Yun-tao,LI Guo-bin,et al.Prediction of ship pitching motion based on AR method[J].Ship Science and Technology,2006,28(3) :28-30.
[3]杜佳璐,郭晨,张显库,等.船舶运动航向自适应非线性控制的仿真研究[J].系统仿真学报,2005,17(6) : 1445 -1448.DU Jia-lu,GUO Chen,ZHANG Xian-ku,et al.Simulation studies on adaptive nonlinear control of ship motion course [J].Journal of System Simulation,2005,17 (6) : 1445 -1448.
[4]赵大威,丁福光,谢业海,等.利用船舶运动数据估计海浪方向谱的研究[J].哈尔滨工程大学学报,2014(10) : 1219-1223.ZHAO Da-wei,DING Fu-guang,XIE Ye-hai,et al.Research on estimating directional wave spectrum using ship motion[J].Journal of Harbin Engineering University,2014(10) :1219-1223.
[5]张显库,贾欣乐,刘川,等.响应型船舶运动数学模型的构造[J].大连海事大学学报,2004,30(1) :18-21.ZHANG Xian-ku,JIA Xin-le,LIU Chan,et al.Research on responding ship motion mathematical model[J].Journal of Dalian Maritime University,2004,30(1) :18-21.
[6]赵希人,陈虹丽,艾晓庸,等.船舶运动纵向受扰力和受扰力矩估计方法研究[J].哈尔滨工程大学学报,2004,25(2) :167-170.ZHAO Xi-ren,CHEN Hong-li,AI Xiao-yong,et al.Estimation of longitudinal disturbing force and tortuosity of ship movement[J].Journal of Harbin Engineering University,2004,25(2) :167-170.
作者简介:梁海军(1978-),男,讲师,主要从事经济数学研究。
收稿日期:2014-12-17;修回日期: 2015-02-27
文章编号:1672-7649(2015) 07-0153-04doi:10.3404/j.issn.1672-7649.2015.07.035
中图分类号:U664.21
文献标识码:A
