小型纯电动船舶永磁同步电机控制系统的优化设计
2015-02-22刘宪珍
刘宪珍
(青岛港湾职业技术学院,山东青岛266404)
小型纯电动船舶永磁同步电机控制系统的优化设计
刘宪珍
(青岛港湾职业技术学院,山东青岛266404)
摘要:随着高能蓄电池和快速充电技术不断发展,现代电动船舶完全可以用在短途的岛际交通运输中,可以实现与电动汽车同样的性能。纯电动船舶的电力推进系统采用蓄电池取代柴油机提供动力,可以避免柴油机产生的废气和噪声对海洋环境造成的污染,极大提高推进系统效率。而影响电力推进系统效率的关键之一就是电机控制器的性能,由于永磁同步电机与其他推进电机相比,具有优越的整体性能,因此本文以永磁同步电机作为纯电动船舶的推进电机,对永磁同步电机控制系统的优化设计展开研究。
关键词:电动船舶;永磁同步电机; DSP
The optimization design of the control system of permanent magnet synchronous motor on small electric ship
LIU Xian-zhen (Qingdao Harbor Vocational and Technical College,Qingdao 266404,China)
Abstract:With the development high of energy battery rapid charged technology,modern electric ship can completely realize the same performance as the electric cars in short island international transportation.Electric ship electric propulsion system use battery replace the diesel engine as the power supply,can avoid marine waste gas and noise environment pollution caused by diesel engine,and greatly improve the working efficiency.One of the key factor to the electric propulsion efficiency is motor controller.Because of the high performance of the permanent magnet synchronous motor compared with the other propulsion motor,this article take the permanent magnet synchronous motor as the propelling engine of the pure electric ship,studied on the optimization design of the permanent magnet synchronous motor system.
Key words:electric boat; permanent magnet synchronous motor;DSP
0 引言
现有的岛际小型交通船大多采用柴油机作为动力,柴油机在运行过程中,不仅会产生巨大的噪声,而且会排出大量的废气,破坏海洋环境。此外,柴油机船舶的缺点还包括操纵性能低、空间布局较差、轮机系统复杂、效率低等。然而,以蓄电池为供电来源的纯电动船舶能够克服柴油机船舶的缺点,其环境效益和经济效益前景不可估量[1]。
永磁同步电机(简称PMSM)与其他推进电机相比,不仅具有高效率、高比功率等显性优势,而且环保节能,是电力推进船舶推进电机最理想的选择。本文结合船舶电站的特点及目前船舶发展的复杂程度,对小功率的永磁同步电机控制系统展开研究,设计一款高性能的小功率永磁同步电机控制器[2]。
1 永磁同步电机的矢量控制模型
永磁同步电机控制系统,采用双环结构控制,由一个速度外环和一个电流内环回路构成。控制流程的描述如下:首先位置传感器(光电码盘)采样PMSM的转子转速和转子所处的位置,然后转子转速与给定的转子转速nref进行比较,比较的结果再根
据公式:输出转矩= 9 550×输出功率/输出转速可以得到速度PI调节模块调节后的交轴电流分量iqref。由于文中采用id= 0的矢量控制方式,因此iqref= 0。PMSM实际的定子三相电流iA、iB以及iC通过电流传感器进行采样,值得注意的是:实际应用中只需要两个电流传感器,因为只要知道其中任意两相的电流值,就可以根据iA+ iB+ iC= 0得到剩下的一相电流大小。然后通过Clarke变换模块把定子电流从ABC轴系中变换到αβ轴系里,再利用Park变换模块把定子电流从αβ轴系变换到同步旋转的dq轴系里,接着把励磁电流id和转矩电流iq分别与各自的目标isqref与目标isdref作比较,形成的误差信号再分别利用PI调节模块进行处理,调整的结果再传给Park逆变换模块,Park逆变换模块把定子电流从dq轴系变换到αβ轴系里,得到的结果传送给SVPWM控制器产生六路PWM调制信号,最终控制三相逆变器模块给产生PMSM的本体提供三相输入电源。
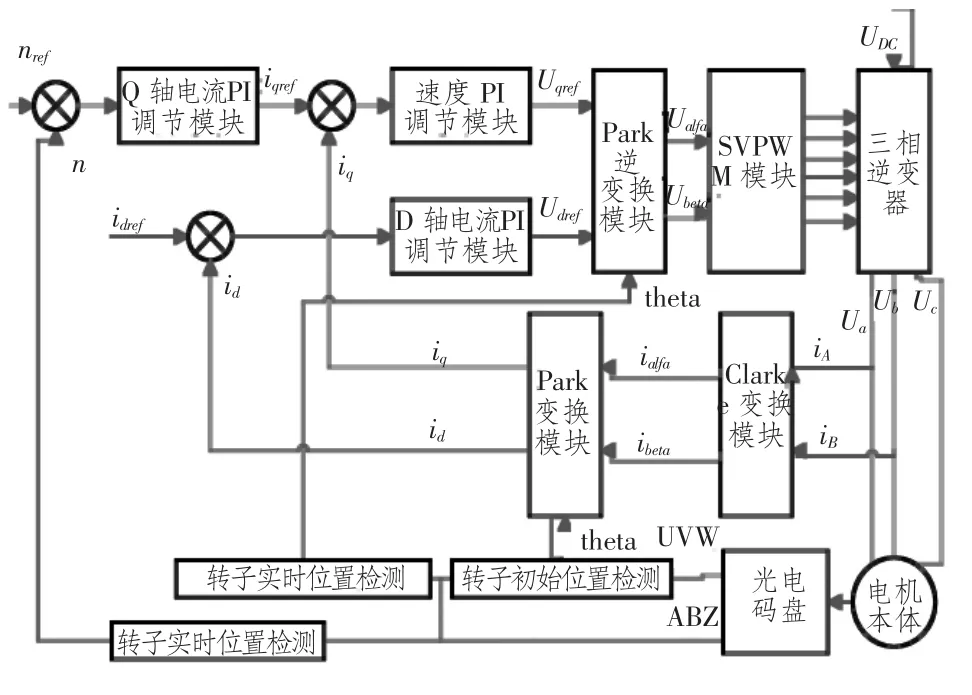
图1 PMSM矢量控制模型Fig.1 Vector control model of PMSM
2 系统硬件设计
如图2所示为PMSM控制系统的硬件整体框架示意图,采用TMS320F2812信号的DSP数字信号处理器作为整个系统的控制核心。
TMS320F2812芯片是32位的定点高速数字处理器,最高工作频率为150 MHz。片内内置了一个128 K×16位的Flash存储器,利用仿真器和RS-232串口可以把用户自己编写程序烧写到里面去,同时Flash存储器是可以加设密码以增加其安全性,阻止别人把内容写进Flash。片内还内置了一个18K×16位的SRAM存储器和一个4K×16位的BOOT ROM,一个1K×16位OTP ROM,并扩展了一个型号为IS61LV25616的256K×16位的SRAM。它的运算速度非常快,计算能力强,可运用在对要求速度响应时间和精确度要求比较挑剔的PMSM的控制系统中。DSP的高速的特性使得它能够自我过滤到一些高频噪声、错误输入和反馈的信号。
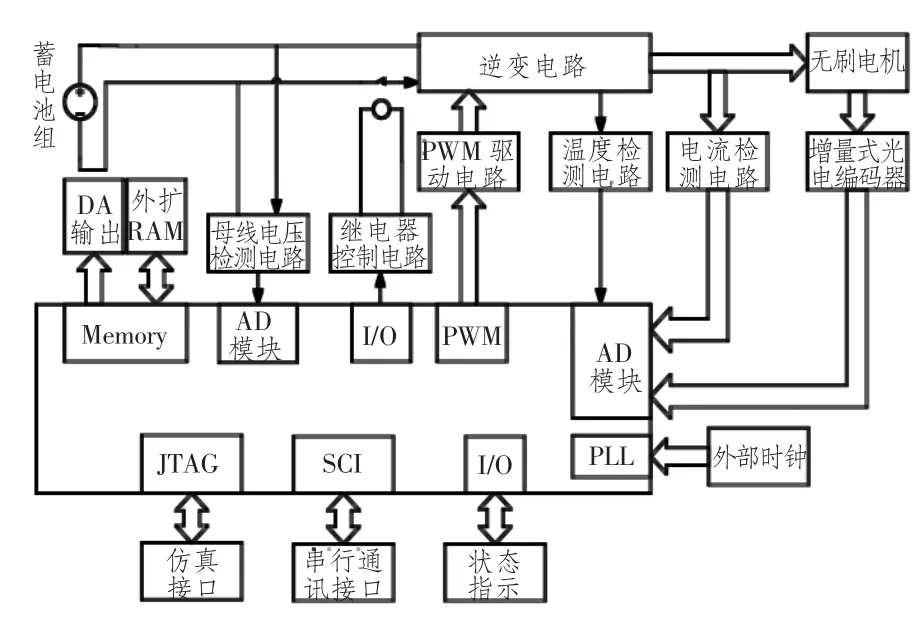
图2 PMSM控制系统硬件框架Fig.2 Hardware diagram of PMSM control system
TMS320F2812 DSP的数据总线相互独立,其内核采用Harvard结构体系。结构采用串行结构,可以加快程序的运算速度,在一个运算周期内可以对加法运算、乘法运算及移位进行处理,内核速度为20 MIPs,1 s可以运算大量的指令。外设资源十分丰富,包括大容量存储器、定时器比较单元、高速异同步串行口、PWM发生器和可复用的I/O口等。其内部运算通过PWM发生器及死区发声单元进行内部逻辑运算,使得DSP的整个控制系统得到了大大的简化。此外DSP通过中断、硬件寻址、指针逆序寻址等控制指令,使得TMS320F2812 DSP可以在船舶电站的复杂监控中体现出自己的优势[3]。
基本工作过程是,首先对增量式光电编码器反馈回来的六路信号进行处理和分析,得到PMSM输出的实际转速和转子的实际位置,同时DSP的AD模块通过霍尔传感器采样蓄电池组的母线电压、母线电流以及PMSM的定子电流信号,DSP将这些采集来的数据进行处理,将其转化为数字量参与控制运算,通过SVPWM算法输出六路PWM波去控制逆变电路模块中的IGBT的关断,最终达到控制PMSM的目的。此外,还可以通过RS232串口与PC机进行通信等。
3 系统软件设计
系统的程序部分,按功能可以分为主程序、电压电流检测子程序、转子速度位置检测子程序和
SVPWM发生子程序。
其中主程序部分,主要功能是对系统进行初始化,同时对寄存器、时间管理器、PWM发生器初始化程序、变量、控制系统参数赋值等进行初始化。PMSM控制系统的主程序工作流程如图3所示。

图3 PMSM控制系统主程序流程图Fig.3 Flow chart of PMSM control system
上提高了转速控制的快速性。增量式PI控制器不同于普通的PI调节器,其输出与速度的变化率成正比,而不是与电机转速成正比,因此其可以在很大程度上保障速度环的动态性能。
2)电流内环PI调节器
电流内环包括2个PI调节器,分别对等效励磁电流和等效转矩电流进行调节。由于PMSM的矢量控制方式采用的是id= 0控制,所以等效的励磁电流调节器的给定输入为0,这里给定输入指的是把PMSM的定子中实际的三相电流进行采样并进行坐标变换到直轴后的等效的励磁电流。给定输入指的是把PMSM的定子中实际的三相电流进行采样并进行坐标变换到交轴后的等效转矩电流。
3.3 SVPWM发生子程序
DSP的内部包含2个事件管理器,每个事件管理器包含一个功率保护中断引脚,主要用来对过压、过流、过温等故障情况进行指示。当管脚电平被拉低时,所有的PWM输出引脚均为高阻状态,并生成一个中断。事件管理器中包含有和比较器有联系的PWM电路,只需要设置对应的寄存器就能实现SVPWM。
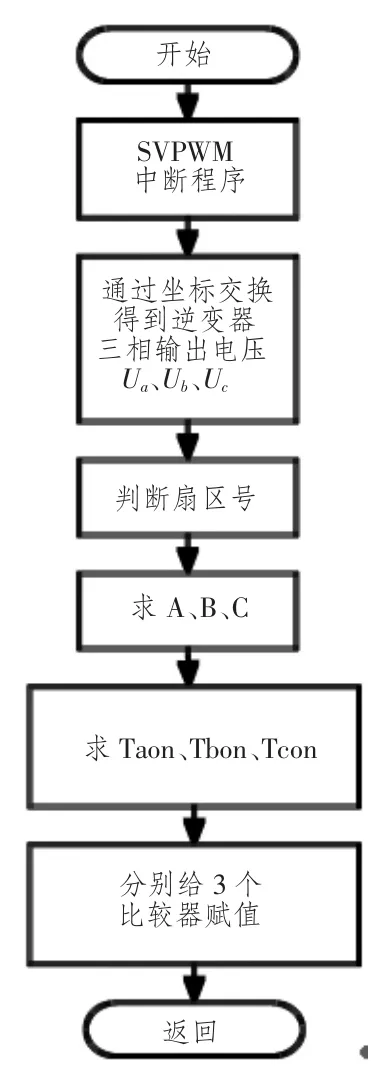
图4 SVPWM发生流程图Fig.4 SVPWM flowchart
4 PMSM控制器仿真试验
在进行控制器的调试之前,有必要对PMSM的矢量控制系统进行仿真。通过仿真,可以预测产品
性能,这对改进产品性能的后续工作非常有帮助。基于数学工具Matlab中的Simulink仿真环境,依据PMSM的设计参数,模拟PMSM的实际工作状况。
4.1仿真模型的建立
根据PMSM的工作原理及控制策略,基于Matlab/Simulink功能,搭建了基于SVPWM算法的仿真模型,如图5所示。该仿真模型按照功能,包括Clarke变换模块、Park变换模块、Park逆变换模块和SVPWM变换模块等,这些相对独立的子模块经过有机整合,就构成了基于SVPWM的算法仿真系统[5]。
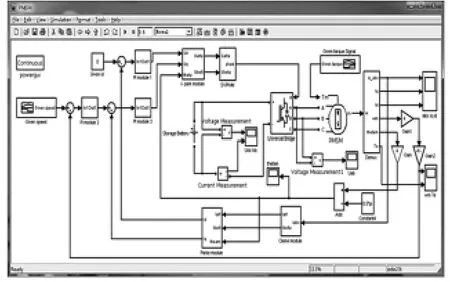
图5 基于SVPWM的矢量控制仿真模型Fig.5 Vector control simulation model based on SVPWM
4.2仿真结果分析
搭建好推进电机的矢量控制模型后,启动仿真,根据相应的仿真结果,对本文设计的系统性能加以验证。选则蓄电池电动船空载运行、速度恒定,负载变化、负载恒定,速度变化这3种典型的工况来验证所设计的大功率PMSM的控制效果。
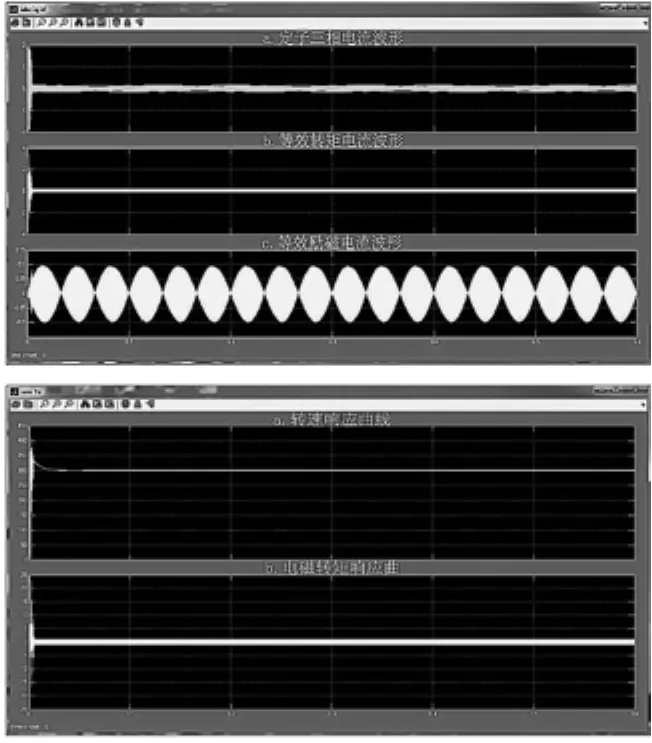
图6 空载情况下的定子电流波形及转速转矩响应曲线Fig.6 Stator current waveform and speed torque response curve on no-load condition
从图6可看出:不仅定子三相电流一直近似为0、等效的转矩电流近似为0,而且等效的励磁电流也非常小,几乎为0。系统启动过程中,转速会有一定的超调和轻微的振荡,但能够在很短的时间内恢复稳态,其稳态误差近似为0。此外,转矩电流始终保持近视为0的状态,证明在空载情况下,系统可以实现良好的动静态性能。
5 结语
以蓄电池为供电来源的纯电动船舶能够克服柴油机船舶的缺点,永磁同步电机具有高效率、高比功率环保节能等显性优势,是电力推进船舶推进电机最理想的选择。本文对小型纯电动船舶的永磁同步电机的驱动器展开研究,设计了一种可用于小型蓄电池电动船的永磁同步电机调速控制系统,并在Matlab/Simulink平台下搭建了仿真模型,进行了仿真试验,实验证明系统可以实现良好的动静态性能。
参考文献:
[1]沈苏雯.电池推进船最新研发动向[J].中国船检,2013 (10) :78-81.
[2]康少波.船舶电力变换系统的稳定性分析与控制研究[D].哈尔滨:哈尔滨工程大学,2013.
[3]张洋,杨平西,刘林生,等.船舶电力推进同步发电机-推进变流器系统谐波特性仿真[J].舰船科学技术,2010,32(8) :196-199.ZHANG Yang,YANG Ping-xi,LIU Lin-sheng,et al.Harmonic characteristic simulation of the synchronous generator-propulsion converter system in electric propulsion [J].Ship Science and Technology,2010,32 (8) : 196 -199.
[4]黄苏融,曾凤,洪文成,等.混合动力汽车用起动发电一体化永磁同步电机控制系统设计与仿真[J].电机与控制应用,2007,34(11).HUANG Su-rong,ZENG Feng,HONG Wen-cheng,et al.Design and simulation of control system of ISG permanent magnet synchronous motor for hybrid electric vehicles[J].Electric Machines&Control Application,2007,34(11).
[5]张庆湖,王东,陈俊全,等.表贴式永磁同步电机对称稳态运行仿真研究[J].舰船科学技术,2014,36(10) : 111 -114.ZHANG Qing-hu,WANG Dong,CHEN Jun-quan,et al.Symmetric steady state simulation of SPMSM[J].Ship Science and Technology,2014,34(10) :111-114.
作者简介:刘宪珍(1972-),男,副教授,研究方向为轮机自动化与智能化。
收稿日期:2014-12-26;修回日期: 2015-02-27
文章编号:1672-7649(2015) 07-0132-04doi:10.3404/j.issn.1672-7649.2015.07.030
中图分类号:U665.11
文献标识码:A
