基于电子海图的远程巡航鱼雷路径规划技术研究
2015-02-22陈彦勇
胡 泊,刘 锋,陈彦勇
(1.海军驻昆明地区军事代表室,云南昆明650031; 2.中船重工第七○五研究所昆明分部,云南昆明650118)
基于电子海图的远程巡航鱼雷路径规划技术研究
胡泊1,刘锋2,陈彦勇2
(1.海军驻昆明地区军事代表室,云南昆明650031; 2.中船重工第七○五研究所昆明分部,云南昆明650118)
摘要:通过研究矢量电子海图数据结构,提取远程巡航鱼雷执行任务关心的海洋环境信息,裁剪无关数据。将矢量数据渲染成为远程巡航鱼雷自主决策系统能够识别的信息格式。本文研究了基于电子海图的航路规划技术,实现远程巡航鱼雷在无人干预条件下按照预先任务自动规划航线,从而提高远程巡航鱼雷的自主决策能力和执行复杂任务及协同工作的能力。
关键词:电子海图;航路规划;远程巡航鱼雷
Research on route planning technology based on electronic charts for long-distance torpedo
HU Bo1,LIU Feng2,CHEN Yan-yong2
(1.Naval Representative Office in Kunming,Kunming 650031,China; 2.Kunming Branch,The 705 Research Institute of CSIC,Kunming 650118,China)
Abstract:By studying the data structure of vector electronic charts,information of marine environment which is concerned by a long-distance torpedo while fulfilling its task is extracted; and irrelevant data are discarded.The vector data are rendered into an information format that can be recognized by the autonomous decision system of the long-distance torpedo.This paper studies on the route planning technology based on electronic charts.With the technology,the route of a long-distance torpedo can be autonomously planned according to the preset task.As a result,the autonomous decision-making ability of a long-distance cruise torpedo and its ability of executing complex tasks and working collaboratively are improved.
Key words:electronic chart; route planning;long-distance torpedo
0 引言
电子海图在船舶航运中的应用主要表现在4个方面:一是电子海图操作,包括电子海图的导入、更新、显示、查询等功能;二是计划航线设计;三是航行监控和报警;四是航迹记录和回放。将海图信息载体遥测信息集成在一起,进行综合处理显示,便于岸基对载体进行可视化监测控制。除此之外,还可将电子海图应用于长航时的远程巡航鱼雷的航行、作战仿真及演示。
目前,电子海图已经应用于船舶航运、船舶引航、海事管理、船舶交通管理和水上工程建设等诸多领域[1]。将电子海图应用于远程巡航鱼雷中,可实现基于电子海图的自主航路规划、以电子海图为表现环境的作战仿真及演示。
基于电子海图的自主航路规划主要是指通过将海图信息渲染成为远程巡航鱼雷自主决策系统能够识别的信息模式,获取必要的海域地理信息及碍航物等信息,在此基础上进行航行决策和规划的过程。研究基于电子海图的远程巡航鱼雷中自主决策技术,当远程巡航鱼雷在执行长航程长航时巡航任务时,将使远程巡航鱼雷能够自主读取电子海图数据信息,并依据海
图中的元素信息进行全局航路规划,提高远程无人水下航行平台的自主决策能力和智能化水平。
1 发展趋势及应用前景
目前电子海图在水中兵器的应用处于探索阶段,主要体现在航路规划方面,重点是建立起符合算法的电子海图专用模型,研究各种规划算法,主要有A*算法、遗传算法、人工势场法和拓扑图法等。因此,研究基于国际标准的电子海图基础上的远程巡航鱼雷自主决策是未来发展的必然趋势。除了在远程巡航鱼雷航路规划中的应用外,同时还可继续研究电子海图在UUV等其他水下航行器中的应用,如多雷集群管理、导航定位等等。
远程巡航鱼雷在海洋环境航行时,需要获得所处海域的海洋环境信息,目前鱼雷的小范围航行可以通过有限的传感器来感知环境信息,但是随着鱼雷的航程越来越远,在大范围海洋环境航行时,靠自身传感器的探测已经不能满足航行的需要。长航时远程巡航鱼雷因其航行距离远超出岸基的指挥控制,在目前人工干预手段有限的情况下,其智能航行能力尤为重要,电子海图恰好提供了详细而准确的海洋环境信息,已经成为自主决策和智能规划的必要输入,航行器可实时进行自主航路规划,避障、防搁浅,保证航行安全。
2 技术路线
利用电子海图实现远程巡航鱼雷的航路规划,达到在无人干预的条件下,利用海洋环境信息,规划一条可行的航行路线。规划的自主决策流程如图1所示。
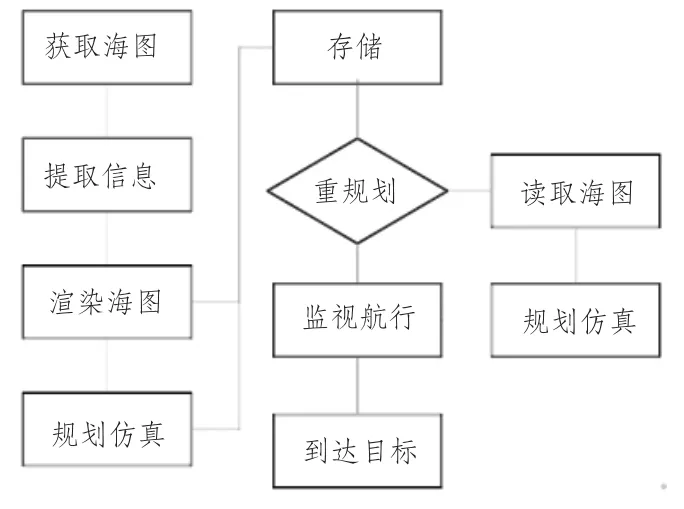
图1 基于电子海图的自主决策流程Fig.1 Autonomous decision flow chart based on the electric chart
远程巡航鱼雷在进行航路规划时,首先通过岸上设备,获取标准格式的电子海图,并对其进行处理,提取相关海洋地理信息并进行渲染,形成自主决策系统可以应用的海图格式,然后进行航路规划。
其次将规划好的航路信息和电子海图存储在航行器中,当需要进行航路重规划时,由航行器读取电子海图,按照航路规划算法重新进行规划,保证航行器到达目标点。
海图渲染是将电子海图特有封装的不可见的原始数据识别、提取并转换为适合与航路规划算法的数据结构。对于规划算法,可采用A*规划算法,也可采用Dijkstra算法,当然,不同的算法就需要有不同的适合于该算法的海图数据结构。
3 电子海图数据提取
电子海图内容以海域要素为主,其内容相当丰富,可详细表示海底地形(水深)、航行障碍物、助航标志、港口设施、潮流、海流等要素,甚至连磁力异常区域、灯塔、浮标都被包含在内。如今国际流行的矢量电子海图S-57格式是按照标准封装的不可见格式,要获得海图数据,首先得读取.000的原始文件格式,读取各个字段的信息[2]。S-57电子海图封装结构如图2所示。

图2 S-57电子海图封装格式Fig.2 The package format of S-57 electronic chart
利用ISO8211开源类库,根据S-57电子海图的封装数据结构,可以将电子海图的所有信息进行读取。读取流程如图3所示。
用于航路规划的主要保留字段包括:特征记录标识字段FRID、特征物标标识字段FOID、特征记录属性字段ATTF、特征记录国家属性字段NATF、特征记录到物标指针字段FFPT、特征记录到空间记录指针字段FSPT、矢量记录参数字段VRID、矢量记录属性字段ATTV、矢量——记录指针字段VRPT、二维坐标字段SG2D (定位各物标、连接点的坐标)、三维坐标字段SG3D (表示测量水深点的坐标)[3],并保留这些字段所对应的远程巡航鱼雷所关系的数据(如暗礁、岛屿信息、威胁区域等)。
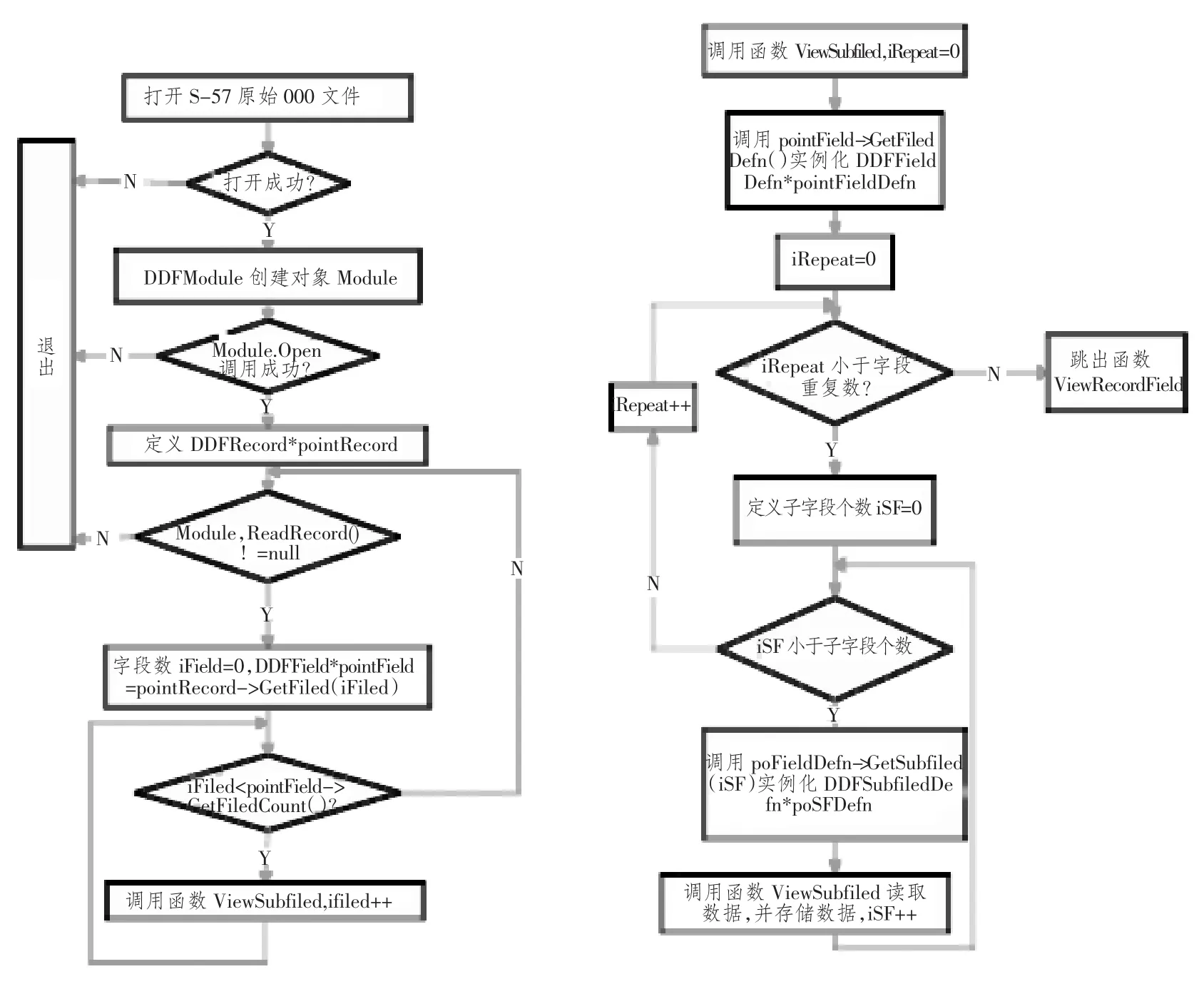
图3 电子海图数据读取流程Fig.3 The process of reading electronic chart
4 电子海图航行数据空间建模
海图渲染可将电子海图根据任务精度划分为网格,如果某个网格存在障碍物,记为1类网格;如不存在障碍物则记为0类网格,以此表示海图的障碍物信息。其次对障碍物进行处理、合并,消除不可航行路段和陷阱路段,将障碍物规范成多边形图形,方便规划算法。这样构建出的数据空间就是包含了具有标识信息的海图数据模型,可方便利用算法进行路径规划。
另一种海图渲染方法可以照网格划分海图区域,将各种障碍物、物标信息以网格为个体,存储进入网格中,这样可以方便使用A*算法进行路径规划。另一方面,也可以单独建立图层,将危险、障碍信息存储于这个图层中,同时对障碍物信息进行多边形化处理,将复杂的障碍物信息转化为有限边的障碍物,这样可以方便使用几何简单的几何避障算法来快速规划航行路线。
利用一张中国南海S-57电子海图提取出水深字段数据,在采用Biharmonic曲面样条插值方法进行插值[4-5],仿真海底地形如图4所示。尽管电子海图并未给出海底地形信息,但可以通过数学方法拟合出海底地形,对远程巡航鱼雷的自主决策或者岸基段遥控遥测提供依据。

图4 中国南海海底地形仿真图Fig.4 The submarine terrain simulation chart of the south sea china
5 路径规划仿真
在规划算法中,A*算法[6]是一种经典的最优启发式搜索算法,它通过预设代价函数对当前节点可能到达的每一个子节点进行代价值计算,选择最小代价节点加入到搜索空间来进行扩展,依次类推直到目标点[7]。
算法的基本思想如图5所示:首先读取海图,当任
务开始点(起点)与任务结束点(终点)航线中包含1类网格时,即表明存在障碍物不能直接到达,软件在所有的1类网格附近寻找0类网格,并替换原航线中的1类网格,直到规划的航行全部由0类网格构成,便得到一条可能的航行路径,直至找出所有可能的航行路径,最后通过代价函数判断得出一条全局航路。

图5 航路规划算法思路Fig.5 Train of thought in route planning algorithm
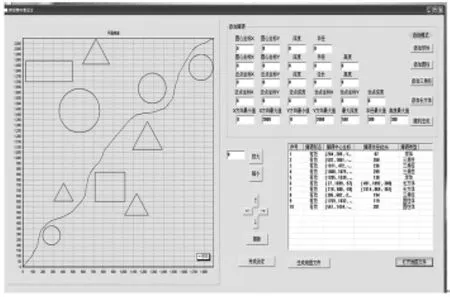
图6 航路规划仿真结果Fig.6 The simulation result of route planning
6 结语
利用电子海图数据建立面向远程巡航鱼雷的航路规划的数据模型,选用适合的航路规划算法进行远程巡航鱼雷的航路规划,是可行的,也是矢量电子海图在远程巡航鱼雷应用中的一个扩展应用。远程巡航鱼雷的自主执行任务能力,不但取决于载体自身对环境的感知探测能力,还取决于载体对环境的先验预知程度,尽可能利用已知环境信息,基于自主决策的相关算法,建立环境模型,最大程度发挥无人自航式水中兵器的智能化决策能力,是长航程长航时水中兵器发展的关键技术之一。经仿真验证,通过提取现有矢量海图数据后,进行相关插值处理并构建航行空间后,采用适当的路径规划算法可以为远程巡航鱼雷计算出一条安全的航路。
参考文献:
[1]王良玉.国际标准电子海图发展的现状、存在的问题与对策探讨[C]/ /中国航海学会航标专业委员会第七届大会论文集,2003:99-101.
[2]S-57 Edition 3.1,Iho transfer standard for digital hydrographic data[S].International Hydrographic Organization,2000.
[3]王晓锋.S-57标准电子海图显示平台的研究[D].哈尔滨:哈尔滨工程大学,2010.
[4]王亚涛,董兰芳,倪奎.Biharmonic样条插值的图像渐变算法及实现[J].中国图象图形学报,2007,12(12) : 2189-2194.
[5]陆鹏.基于Biharmonic样条的离散数据三维地形生成方法[J].广西水利水电,2011(6) :64-65,73.
[6]任波,周熹,于雷.基于改进A*算法的飞行器三维航迹规划算法[J].系统工程与电子技术,2008,30(2) :324-326.
[7]Antonios Tsourdos Brian White,Madhavan Shanmugavel,祝小平,周洲等,译,Cooperative Path Planning of Unmanned Aerial Vehicles[M].2013(1) :66-80.
作者简介:胡泊(1967-),男,硕士,高级工程师,研究方向为水中兵器。
基金项目:国防科技预先研究基金资助项目
收稿日期:2015-03-04;修回日期: 2015-05-12
文章编号:1672-7649(2015) 07-0116-04doi:10.3404/j.issn.1672-7649.2015.07.026
中图分类号:TJ630.1
文献标识码:A
