基于BN和ANN联合模型的舰船舱室火灾探测方法
2015-02-22谢田华杨祖耀
谢田华,杨祖耀,迟 卫
(海军大连舰艇学院航海系,辽宁大连116018)
基于BN和ANN联合模型的舰船舱室火灾探测方法
谢田华,杨祖耀,迟卫
(海军大连舰艇学院航海系,辽宁大连116018)
摘要:针对平时或战时火灾传感器可能出现的故障或失效问题,基于贝叶斯网络(BN)的不确定性推理特性和神经网络(ANN)良好的非线性映射能力,提出基于二者联合模型的舱室火灾探测方法,分别在正常、添加随机噪声和传感器故障条件下对模型性能进行仿真测试。结果表明,联合模型具有较强的抗干扰能力,在设定的各种情况下均能正确地判断火灾状态,具有良好的探测准确度与响应速度,单次探测耗时仅为10 ms,可有效解决舰船舱室火灾探测过程信息不确定、不完整和实时性要求高的问题。切实增强舱室火灾的早期自动探测能力。
关键词:舱室火灾探测;贝叶斯网络;神经网络;联合模型
Ship compartment fire detection method based on joint BN and ANN model
XIE Tian-hua,YANG Zu-yao,CHI Wei
(Department of Navigation,Dalian Naval Academy,Dalian 116018,China)
Abstract:To deal with malfunction and failure of fire sensors in peacetime and wartime,a joint model based on Bayesian Network(BN) and Artificial Neural Network(ANN) was put forward on account of BN's characteristic of reasoning uncertain knowledge and ANN's excellent nonlinear mapping ability.Joint Model was separately tested in circumstances with stochastic noises,failures of sensors and nothing abnormal,which monitors ship's diversified environments.Joint Model rightly estimated the fire state with acceptable error in all tested examples,and each detection took 10 ms in average.The results of simulation show that Joint Model has satisfying accuracy and responding speed,and the outstanding ability of anti-jamming,therefore,it is good at estimating fire state in circumstances with uncertain and incomplete information in real time.It can better improve early automatic detection ability to detect ship compartment fire early and automatically.
Key words:compartment fire detection; Bayesian Network; Artificial Neural Network;joint model
0 引言
舰船上舱室众多,结构复杂,易燃材料多,发生火灾时如能及时发现并扑灭初期小火,有效控制火势蔓延,必将极大降低火灾的危害和影响,因此,舱室火灾的早期自动探测具有十分重要的意义[1]。
传统的单一传感器火灾探测方法在响应时间和探测准确度方面不能完全满足现实需求,因此,近年来出现了多种利用多传感器数据融合进行火灾探测方法[2]。美国海军研究实验室Rose-Pehrsson等人提出“Volume Sensor”的概念,融合多传感器数据用于舰船威胁态势感知,其中包括火灾探测,经过实验效果良好,准确度和响应速度与单一传感器探测方法相比均有所提高,但是其工程庞大,涉及传感器种类和数量众多,推广难度较大[3-4]。张德凤等[5-7]先后提出多传感器火灾探测的神经网络模型及其改进方法,成功降低了漏检率和误警率,但无法解决部分传感器故障或失效等信息不确定、不完整的情况。陈静等[8]提出将贝叶斯网络应用于多传感器火灾探测,通过概率分析和推理,成功解决了火灾过程信息不确定、不完整的问题,但该方法对传感器种类的要求较高,同时在探测的准确度方面较其他方法没有优势。
由于舰船日常发生碰撞事故所处的恶劣环境、风浪中航行、战场打击等因素,火灾传感器很有可能出现故障或失效的情况,因此,必须研究解决传感器信息不确定、不完整时的火灾探测问题。基于此,本文提出用贝
叶斯网络和神经网络的联合模型进行舰船舱室火灾探测。介绍了贝叶斯网络和神经网络的构建关键过程,以及如何将2种模型联合应用于多传感器火灾探测,并给出了加随机噪声和传感器故障情形的仿真和结果分析。
1 模型基础和构建方法
1.1模型理论基础
1.1.1贝叶斯网络
贝叶斯网络(Bayesian Network)是一种表示变量间概率分布及关系的有向无环图(Directed Acyclic Graph,DAG)模型,用来表示和推理不确定性知识,它将概率论的相关知识与图形理论相结合,具有较为严格的理论基础,是智能领域的强有力工具[9]。
一个标准的贝叶斯网络可用数学符号表示为:

式中: S为一个能表示变量域的DAG; V(包含n个有限变量Vi)为随机变量集合; L为有向边的集合; P为条件概率分布集。
S和P定义V的联合概率分布,根据条件独立的性质,联合概率分布为:

其中ζ为先验知识。对于每个变量xi,令πi{x1,x2,…,xi-1}是xi的父节点,{x1,x2,…,xi-1}条件独立,则

给定节点变量集合E为V的子集,查询节点变量集合为Q,概率推理在给定证据E =e时,计算条件概率:

1.1.2神经网络
人工神经网络是一个以有向图为拓扑结构,通常简单称为神经网络,它由大量简单的处理单元(神经元)通过广泛地互相连接而形成的复杂动态网络系统。神经网络系统是一个高度复杂的非线性动力学系统,它通过对连续或断续式的输入作状态响应而进行信息处理,虽然每个神经元的结构和功能十分简单,但由大量神经元构成的网络系统的行为却是丰富多彩和十分复杂的[10]。
神经网络结构复杂,其模型多种多样,其中BP (Back Propagation)网络是最具代表性的模型之一,具有结构简单、可塑性强的优点。BP网络是一种多层前馈神经网络,可以实现从输入到输出的任意非线性映射,它利用输出后的误差来估计输出层的直接前导层的误差,再用这个误差估计更前一层的误差,如此一层一层地反传下去,就获得了所有其他各层的误差估计。
1.2模型构建方法
火灾发生过程的物化特征主要有温度升高、烟雾、CO和CO2浓度升高、火焰、燃烧音等,现代舰船普遍装配的火灾传感器主要有温度传感器、感烟传感器、气体传感器和图像传感器等。为了保证系统有较高的探测准确度和响应速度,选择哪些物化特征作为检测参量应该考虑火灾发生后物化特征的显现时机和明显程度。火灾发生初期,会产生大量烟雾,CO浓度迅速增大,并且与无火灾时相比浓度增大显著;伴随着明火的产生,环境温度会迅速升高[11-12]。综合考虑之后,本文选择温度、烟雾和CO浓度作为检测参量。
舰船火灾发生过程中可能呈现明火和阴燃火2种典型状态,再加上平时的无火状态,系统根据检测参量推理判断,最终输出发生无火、阴燃火和明火的概率。
贝叶斯网络的参数学习和神经网络的训练,以及模型的验证都需要一定数量的样本数据,本文依据GB4715-2005点型感烟火灾探测器技术要求及试验方法[13],取得SH1木材热解阴燃火、SH4正庚烷液体(明)火和标准无火数据作为样本,并取得了一定量的偏离样本数据对模型进行验证。
1.2.1构建贝叶斯网络
一般而言,构建贝叶斯网络模型有2种方法:基于专家知识手工建立和通过案例学习自动获取。本文将2种方法结合:首先,通过对火灾机理和传感器检测量的分析,确定贝叶斯网络的结构,如图1所示;然后通过样本数据学习获得模型的相关参数。图1中温度、CO浓度和烟雾为传感器检测量,因为传感器输出为连续量,所以它们是连续节点;无火、阴燃火和明火是离散节点,且只有2个值,表示是否发生。

图1 贝叶斯网络结构Fig.1 Structure of bayesian networks
1.2.2构建神经网络
采用标准的3层BP网络。输入层节点数设为3,分别代表温度、烟雾和CO浓度;输出节点数设为3,分别表示无火概率、阴燃火概率和明火概率;隐含层节点数受输入层和输出层的节点数量制约,其选取没有理论上的指导,主要根据经验公式

初步确定范围,然后根据试验结果确定节点数,式中q、r、s分别为隐含层、输入层和输出层节点个数。试验发现,当隐含层节点个数为7个左右时,训练时间最短,误差下降最快。通常情况下,可以在解决问题的基础上增加1~2个隐含层节点,用以加快误差的下降速度。本文设计的隐含层节点数最后确定为8个,神经网络结构如图2所示。
将样本中的传感器数据和概率分别作为神经网络的输入信号和期望输出,进行神经网络的训练,经过647次迭代后,神经网络均方误差达到设定的条件,如图3所示。
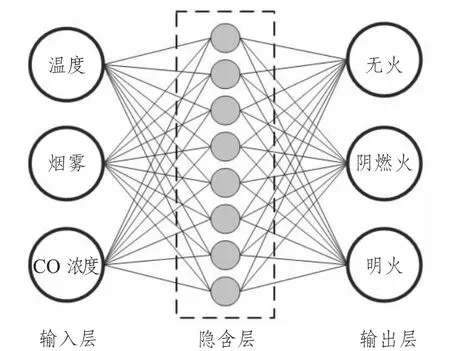
图2 神经网络结构Fig.2 Structure of artificial neural network
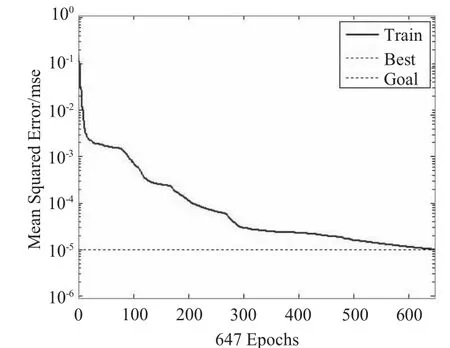
图3 神经网络误差曲线Fig.3 Error curve of artificial neural network
1.2.3构建联合模型
神经网络内部结构相对复杂,经过适当训练后,模型输出与真实情况比较接近,但是它的抗干扰能力不强,当输入数据含有较大噪声或者某个传感器故障后,神经网络很难对火灾状态做出正确的判断。而贝叶斯网络虽然在判断准确度上逊色于神经网络,但是它对于局势的整体判断能力较强,尤其是在数据含噪声或者传感器故障的情况下仍然有较好的表现。因此,本文将二者结合,优势互补,以解决舰船舱室火灾探测过程信息不确定、不完整的问题,同时在一定程度上保证系统的探测准确度和响应速度。本文采用加权平均的方法对2种网络模型进行联合,同时,考虑到神经网络抗干扰能力弱,当它的输出与贝叶斯网络相差超过一定阈值时,对贝叶斯网络的输出赋予更大的权重,如式(10)。
其中α1,α2,α3和δ1,δ2的值通过试验确定。

2 仿真及结果分析
2.1学习、训练和验证
利用样本数据进行贝叶斯网络的参数学习和神经网络的训练,利用偏离样本数据对模型进行验证,贝叶斯网络、神经网络和联合模型的性能表现如图4所示。
由图4可见,3种模型的实际输出与期望输出基本相符,少数数据有较大偏差;贝叶斯网络能正确判断火灾状态,神经网络错误判断了序号8的火灾状态,联合模型能正确判断所有的火灾状态;更为重要的是,神经网络和联合模型的判断误差均小于贝叶斯网络,3种模型的平均判断误差见表1。

表1 三种模型的平均判断误差Tab.1 Average error of three models
由表1可见,联合模型对无火和明火状态的平均判断误差小于贝叶斯网络和神经网络,对阴燃火状态的平均判断误差介于二者之间,联合模型的平均判断误差和神经网络比较接近,可以认为,联合模型依靠神经网络成功控制了误差。
2.2加噪声探测仿真
正常情况下,传感器的数据都含有一的噪声,为
了测试模型的抗干扰能力,在原来数据的基础上再加上一定范围的随机噪声。当给CO浓度数据加上随机噪声之后,3种模型的性能表现如图5所示。

图4 三种模型的比较Fig.4 Comparison of three models
由图5可见,加上随机噪声后神经网络的判断正确率受影响较大,错误判断了多个序号的火灾状态,而贝叶斯网络仍然能正确判断火灾状态,联合模型在其作用下正确判断了所有火灾状态。3种模型的平均判断误差见表2。

表2 加噪声后3种模型的平均判断误差Tab.2 Average error of three models with noise
由表2可看出,联合模型对3种火灾状态的平均判断误差均小于贝叶斯网络和神经网络,说明联合模型通过融合2种网络成功控制了误差。
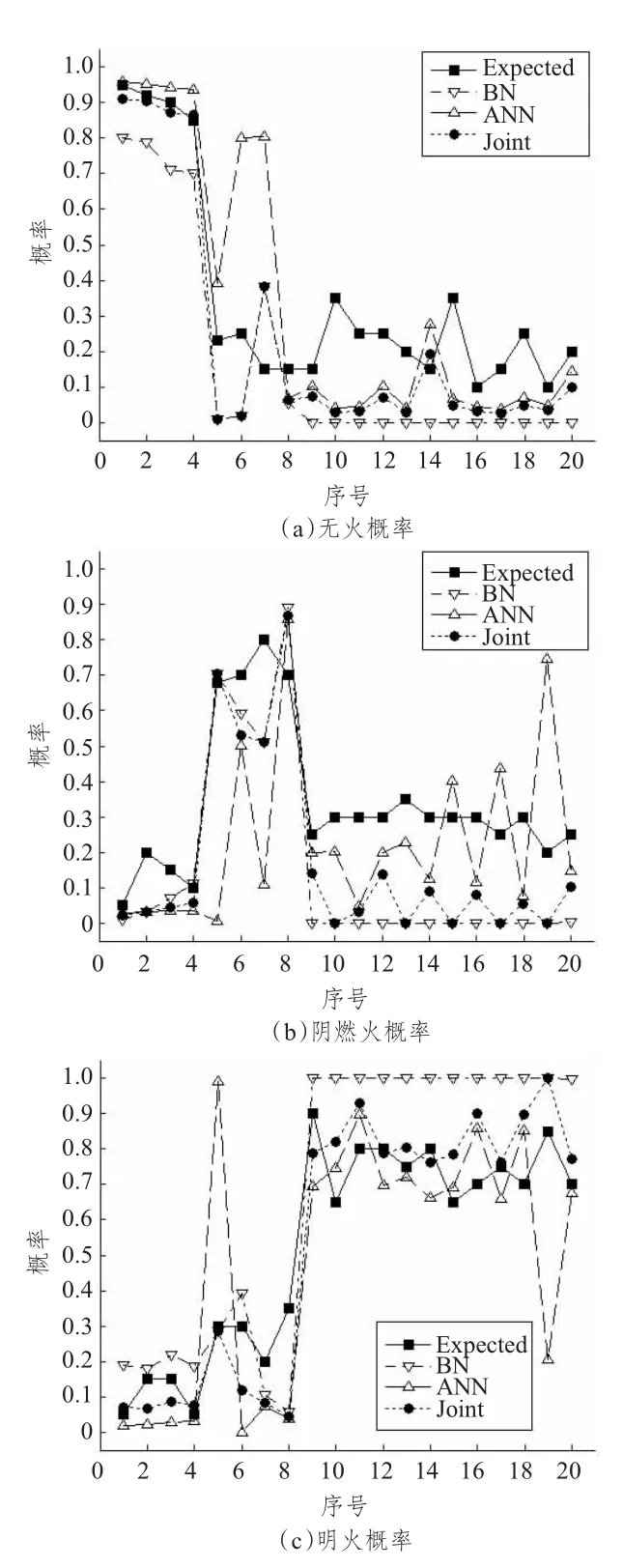
图5 加噪声后3种模型的表现Fig.5 Comparison of three models with noise
2.3传感器故障探测仿真
舰船平时发生事故或战时被武器击中都有可能造成传感器故障或失效,此时,需要考虑联合模型能否正确判断火灾状态。假设烟雾传感器故障,输出为0,3种模型的性能表现如图6所示。
由图6可看出,神经网络的判断受到较大干扰,出现了较多判断失误,而贝叶斯网络仍然能正确判断火灾状态,联合模型在其作用下正确判断了所有火灾状态。3种模型的平均判断误差见表3。
由表3可看出,联合模型对3种火灾状态的平均判断误差均小于贝叶斯网络和神经网络,说明联合模型通过融合2种网络成功控制了误差。
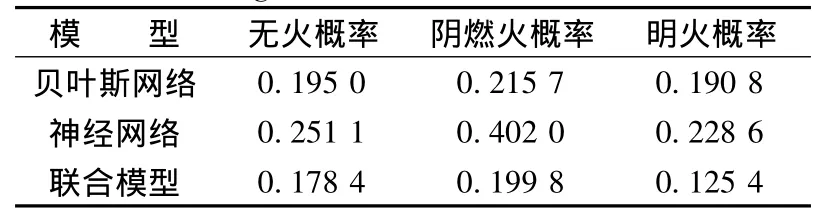
表3 传感器故障后3种模型的平均判断误差Tab.3 Average error of three models with failure

图6 传感器故障后三种模型的表现Fig.6 Comparison of three models with failure

表4 三种模型的响应时间Tab.4 Response time of three models
由表4可看出,联合模型的响应时间约为贝叶斯网络和神经网络的总和,处理一组传感器数据的平均响应时间为10 ms,能够满足实时性要求。
2.5结果分析
由本文仿真结果分析可得:贝叶斯网络抗干扰能力强,能准确把握火灾状态,然而判断概率的误差较大;神经网络能比较准确地判断火灾状态的概率,但是抗干扰能力弱。联合模型结合了二者的优点,既拥有贝叶斯网络较强的抗干扰能力,能在加随机噪声和传感器故障的情况下正确判断舰船舱室火灾状态;同时它依靠神经网络成功控制了误差,并且联合模型的响应时间为贝叶斯网络和神经网络的总和,响应速度能满足现实需求。
3 结语
对舰船舱室火灾自动探测技术的研究一直是国内外研究的热点,对于保障舰船生命力具有重要意义。本文提出基于贝叶斯网络和神经网络联合模型的火灾探测方法,在加入随机噪声和传感器故障的情形下测试了模型的探测性能,结果表明,联合网络模型具有较强的抗干扰能力和良好的探测准确度与响应速度,可解决舰船舱室火灾探测过程信息不确定、不完整和实时性要求高的问题。为舰船火灾识别技术的发展提供了新思路,将联合模型应用于实际的舰船舱室火灾探测和其他场合,以及对该模型的改进,是进一步需要深入研究的方向。
参考文献:
[1]浦金云,金涛,邱金水,等.舰船生命力[M].北京:国防工业出版社,2008.
[2]张鑫,隋金雪,张岩.信息融合技术在火灾探测中的应用研究[J].中国安全科学学报,2011(6) :94-98.
[3]ROSE-PEHRSSON S L,MINOR C P,STEINHURST D A,et al.Volume sensor for damage assessment and situational awareness[J].Fire Safety Journal,2006,41:301-310.
[4]GOTTUK D T,HARRISON M A,ROSE-PEHRSSON S L,et al.Shipboard evaluation of fire detection technologies for volume sensor development: preliminary results[R].NRL Letter Report 6180/0282,Chemistry Division,Code 6180,US Naval Research Laboratory,Washington,DC,20375; August 28,2003.
[5]马宪民,张德凤.火灾探测信息融合的一种新型实现方法[J].仪器仪表学报,2006(6) :2138-2139.
[6]李光,张铁壁.多传感器数据融合技术在火灾报警中的应用[J].河北工业大学学报,2010(8) :35-38.
[7]樊雷松,强彦,等.无线传感网中基于BP神经网络的数据融合方法[J].计算机工程与设计,2014(1) :62-66.
[8]陈静,付敬奇.贝叶斯网络在火灾报警系统中的应用[J].仪表技术,2011(10) :47-51.
[9]史志富,张安.贝叶斯网络理论及其在军事系统中的应用[M].北京:国防工业出版社,2012.
[10]马锐.人工神经网络原理[M].北京:机械工业出版社,2010.
[11]程晓舫,王瑞芳,张维农,等.火灾探测的原理和方法(上)[J].中国安全科学学报,1999(2) :24-29.
[12]程晓舫,王瑞芳,张维农,等.火灾探测的原理和方法(下)[J].中国安全科学学报,1999(4) :1-5.
[13]GB4715-2005,点型感烟火灾探测器[S].
作者简介:谢田华(1976-),男,副教授,主要从事舰船损管和智能决策、军事航海安全保障等方向的研究。
收稿日期:2015-05-11;修回日期: 2015-06-13
文章编号:1672-7649(2015) 07-0099-05doi:10.3404/j.issn.1672-7649.2015.07.022
中图分类号:U674.76
文献标识码:A
