水下机器人在线绝缘检测系统研究
2015-02-22谷志珉
王 彪,谷志珉,吴 超,葛 彤
(1.上海交通大学,上海200240; 2.国家海洋局北海技术中心,山东青岛266033)
水下机器人在线绝缘检测系统研究
王彪1,谷志珉2,吴超1,葛彤1
(1.上海交通大学,上海200240; 2.国家海洋局北海技术中心,山东青岛266033)
摘要:为提高水下机器人在未知危险工作环境下的可靠性和生存性,对水下机器人在线绝缘检测系统进行研究。描述基于辅助电源法的绝缘检测原理及绝缘电阻计算公式,设计绝缘检测系统。该系统主要由电源系统、采样电路和隔离电路构成,电源输入、信号输入和信号输出相互隔离。最后,通过模拟试验平台验证所设计绝缘检测系统的有效性。
关键词:水下机器人;绝缘电阻;检测;辅助电源;隔离
Research on on-line insulation detection system for underwater vehicles
WANG Biao1,GU Zhi-min2,WU Chao1,GE Tong1
(1.Shanghai Jiaotong University,Shanghai 200240,China;
2.North China Sea Branch of State Oceanic Administration,Qingdao 266033,China)
Abstract:In order to increase the reliability and survivability of underwater vehicles in unknown,hazardous environment,an on-line insulation detection system has been developed in this paper.The insulation detection principle based on auxiliary source is described and the calculation formula of insulation resistance is presented.The designed system consists of power supply,sampling circuit and isolation circuit while power supply,signal input and signal are isolated from each other.Finally,experiment results demonstrate the effectiveness of the insulation detection system.
Key words:underwater vehicle; insulation resistance; detection; auxiliary source;isolation
0 引言
水下机器人作业过程中面临复杂海况和恶劣的工作环境,且现代水下机器人的系统结构日益复杂,因此对可靠性和生存性提出了更高的要求。电子系统作为水下机器人的控制核心,其健康状态是水下机器人完成作业任务和安全返航的前提。电子系统使用电力作为主要动力源,电池、二次电源、直流传输母线、传感器、直流负载等都会涉及绝缘问题,且由于水下机器人工作环境的特殊性,温度、盐度的变化,海水腐蚀都会引起绝缘的损伤和破坏,使绝缘性能下降,电能消耗增加,影响水下机器人正常工作,严重时还可能造成次生故障,导致水下机器人失事事故。因此,绝缘检测是水下机器人安全系统的一个重要部分[1]。
现有直流系统绝缘电阻检测方法主要有电桥法[2]、改进电桥法、交流信号注入法和直流漏电流法。电桥法基于电桥平衡原理,应用广泛,但该方法无法检测正负极绝缘同时下降的情况,同时正负极绝缘差值较大时会造成误报警。改进电桥法[3],又称乒乓电桥法,通过切换电桥两臂电阻值的大小,使电桥没有一个固定的平衡点,此方法需要电子开关或继电器,可靠性差,且有动作延时。交流信号注入法[4]需向系统注入附加测试信号,会给直流系统本身带来影响,测量精度易受直流系统分布电容影响。直流漏电流法[5],因漏电流较小,难以测量,精度和灵敏度都难以提高。水下机器人绝缘检测要求实时性好,漏报率低,检测系统与被检对象电气隔离。鉴于此,本文基于文献[6]中提出的辅助电源法,设计水下机器人
在线绝缘检测系统,实现了被检对象与输出信号的电气隔离,具备良好的动态检测能力。
1 绝缘检测原理
绝缘电阻测量原理如图1所示。图中,R+和R-为待测的正、负极对地绝缘电阻,Vs为辅助电源,R1为采样电阻,R2起限流和分压作用。调整R1和R2的阻值,可使系统适应不同电压等级的绝缘测量。辅助电源正极经R1和R2与待测电压的负极相连,辅助电源负极与电子舱壳体相连。在待测系统绝缘良好的情况下,辅助电源没有电流回路,漏电流为0,采样电压V1为0;在绝缘下降的情况下,辅助电源通过R+和R-形成闭合回路,产生漏电流,通过采集R1上的电压计算绝缘电阻值,由控制计算机产生报警信号,并切断待测系统的电源。检测原理的等效电路如图2所示,由电路定律,绝缘电阻计算公式如下:
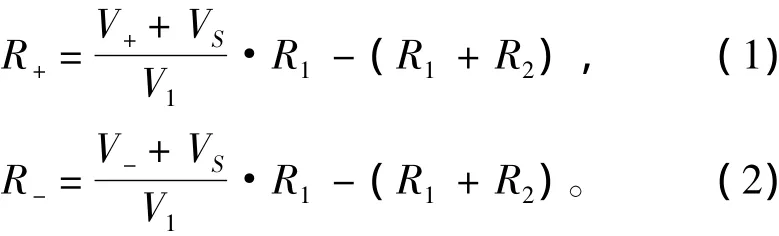
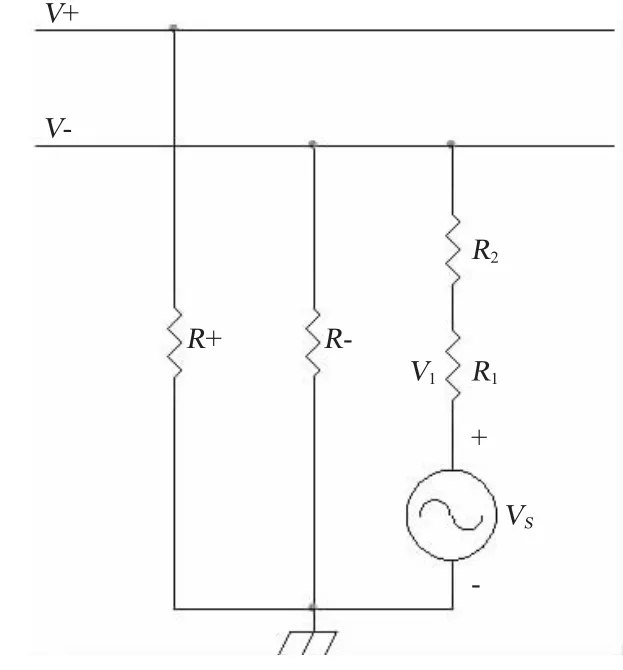
图1 绝缘电阻测量原理Fig.1 Insulation resistance detection principle
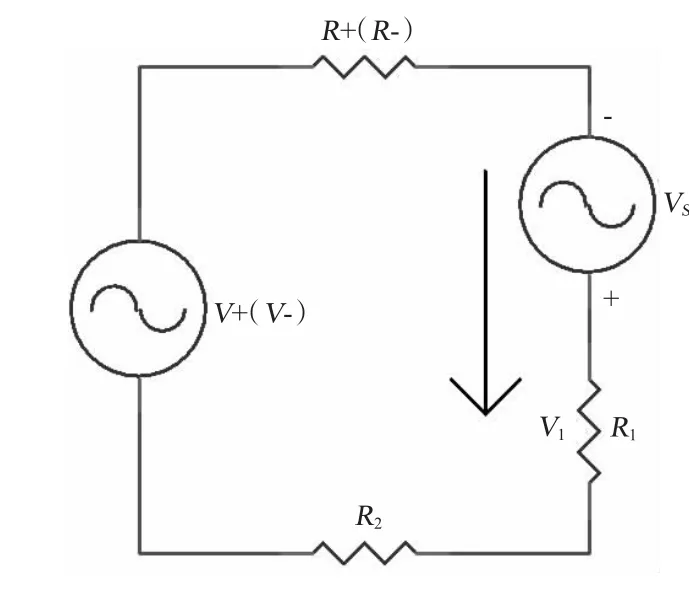
图2 检测原理等效电路Fig.2 Equivalent circuit of detection principle
2 系统设计
根据以上绝缘检测原理开发的绝缘检测系统如图3所示。本系统主要由电源系统、采样电路和隔离电路构成,为保证绝缘检测的可靠性,电源输入、信号输入和信号输出相互隔离。
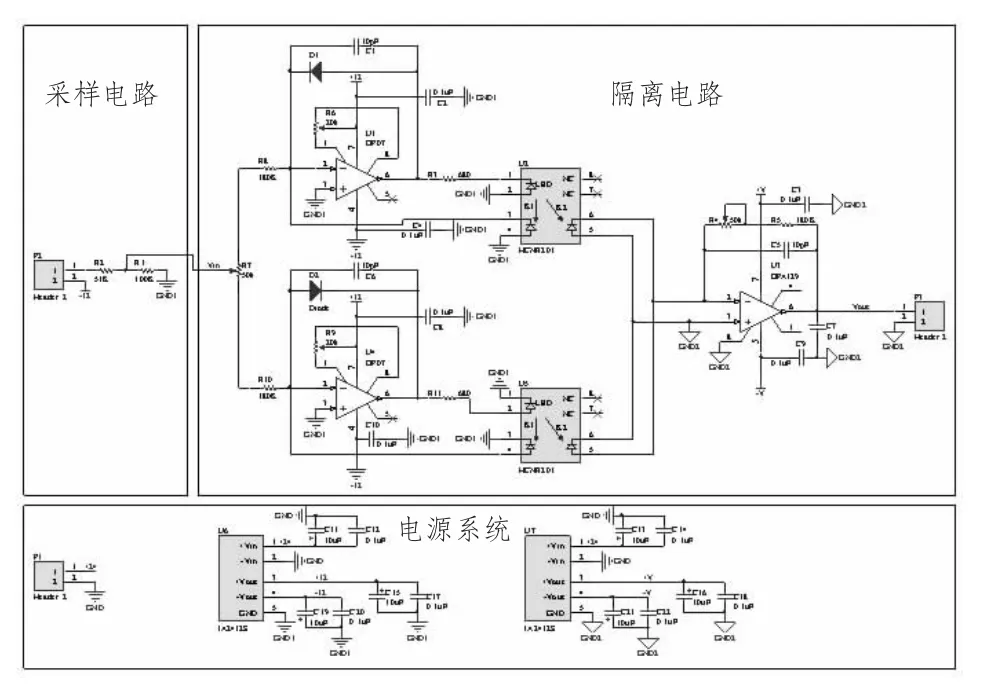
图3 绝缘检测电路原理图Fig.3 Schematic diagram of insulation detection
2.1电源系统
系统工作电源选用24 V DC,一方面可以省去产生低等级电压所需的二次电源,简化水下机器人电源系统,减少硬件开销,另一方面,水下机器人供电电池(自治式水下机器人)或应急电池(无人遥控水下机器人)多为24 V,可直接为绝缘检测系统供电。隔离电源选用MORNSUN公司IA_S-1W系统隔离稳压双路输出DC-DC模块电源。U6为隔离电路初级运放提供工作电源,同时为采样电路提供辅助电源。U7提供隔离电路次级运放所需的工作电源。
2.2采样电路
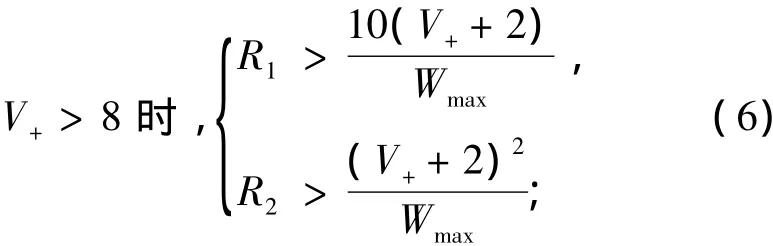
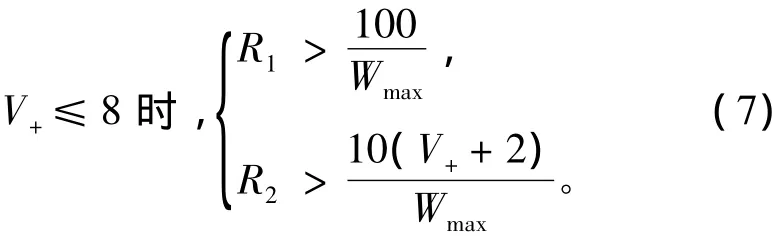
辅助电源采用负电源,这样系统的输出信号为负电压信号,与其他传感器信号区分明显,易被控制计算机识别。关于R1和R2的选取,根据绝缘检测的等效电路和绝缘电阻计算公式,当R+=0时,V1达到最大,取V1为信号边界-10 V,此时

漏电流I= 10/R1。R1和R2上的功率需满足

将式(3)代入式(4)和式(5),最终得到
2.3隔离电路
采样电压被控制计算机采集,为确保计算机系统不受被测对象的影响,采用线性隔离放大电路传输采样电压。隔离电路同时还能消除系统中模拟信号回路因共地引起的噪声干扰及其他原因引起的干扰信号。本文选用HP公司的高线性度模拟光电耦合器HCNR201为核心搭建双极信号隔离电路。此处,保留对正输入信号的隔离功能,当辅助电源为正电源时,隔离电路无需改动可良好兼容。由于二极管D1和D2的作用,当输入信号为正时D2导通,D1截止,放大器U1呈开环状态,光耦U5工作,U2关断;当输入信号为负时,则正好相反。当HCNR201的光敏光极管受光后,其输出信号将反馈到放大器的输入端,以提高光耦的线性并减少温漂,第5和第6端输出的信号经运放入放大后输出。电位器R7的作用是调节运放输入偏置电流的大小。电容C1和C6为反馈电容,用于提高电路的稳定性,消除自激振荡,滤除电路中的毛刺信号,降低电路的输出噪声,其容值可以根据电路的频率特性来选取。放大器U3的作用是把光耦输出的电流信号转变为电压信号以供后级电路使用,并增加负载驱动能力,降低输出阻抗。调整电阻R4的值可以调整信道的增益。
3 系统测试
为验证所设计绝缘检测系统的有效性,进行模拟试验的平台接线如图4所示。直流稳压电源为绝缘检测电路板提供工作电源,并模拟被测电压。绝缘检测系统的输出信号由研华公司模拟量输入模块采集,然后通过RS485接口发送到工控机。在被测对象正、负极与大地之间接入精度电阻,再将绝缘电阻的实际值和测量值进行比较分析。试验结果如表1所示。
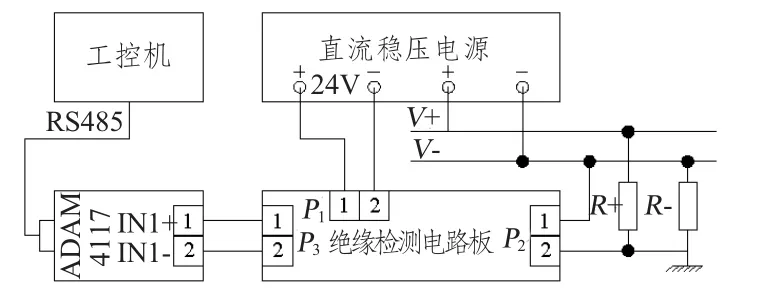
图4 模拟试验平台原理图Fig.4 Sketch of test platform
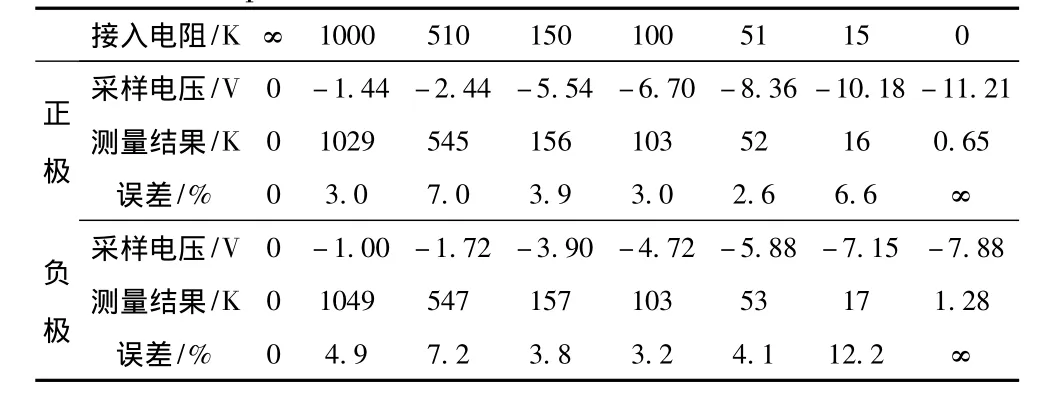
表1 绝缘电阻测试试验结果Tab.1 Experiment results of insulation resistance detection
试验结果表明,在单点接地的情况下,绝缘检测系统的测量值与实际绝缘电阻值吻合较好,检测范围广,测量误差满足水下机器人的实际需求。从表中可看出,相同的接地电阻,不同电压等级接地,测出的采样电压不同。考虑到水下机器人的外围设备更容易发生绝缘下降的情况,设计上外围设备就尽量采用同一等级电源。实际应用中,不管是哪个等级电压绝缘下降,绝缘电阻采用“虚阻”值计算,即按式(1)和式(2)计算的阻值来显示和报警。对于同一采样电压,发生绝缘下降的电压等级越低,计算所得绝缘电阻阻值也越小。
4 结语
绝缘检测作为水下机器人安全状态评估的重要指标,是未来智能化水下机器人不可缺少的环节。针对水下机器人的工作特点,本文设计了水下机器人在线绝缘检测系统,实现了被检对象与输出信号的电气隔离,具备良好的动态检测能力。试验结果表明该系统能较准确地检测单点绝缘破坏的状况,满足水下机器人实时监测的需求。但是该系统难以区分多点接地情况下的绝缘故障源,只能通过“虚阻”值进行估算,精确的故障定位有待研究。
参考文献:
[1]徐玉如,庞永杰,甘永,等.智能水下机器人技术展望[J].智能系统学报,2006,1(1) :9-16.
[2]邓晨华.直流系统绝缘在线监测与蓄电池故障预测[D].哈尔滨:哈尔滨工业大学,2013.
[3]陈志强,宋凡峰,刘畅.一种新颖的直流系统在线绝缘检测方法[J].电工电气,2009,29(6) :40-42.
[4]董建政,卢建峰.一种发电厂直流系统绝缘检测的解决方案[J].山东电力技术,2007,25(6) :7-9.
[5]赵梦欣,陈国峰,余伟成.直流系统绝缘监测的直流漏电流法改进方案[J].电力系统自动化,2009,33(14) :83-107.
[6]郭宏榆,姜久春,温家鹏,等.新型电动汽车绝缘检测方法研究[J].电子测量与仪器学报,2011,25(3) :253-257.
作者简介:王彪(1986-),男,博士研究生,主要研究方向为水下机器人技术。
基金项目:国家自然科学基金资助项目(51109132)
收稿日期:2014-09-05;修回日期: 2014-11-13
文章编号:1672-7649(2015) 07-0043-03doi:10.3404/j.issn.1672-7649.2015.07.010
中图分类号:U674.941; U672.74
文献标识码:A
