基于物联网的移动机器人综合实训平台设计
2015-02-21李文生邓春健杨伟钧
杨 亮, 李文生, 邓春健, 杨伟钧
(1. 电子科技大学 中山学院,广东 中山 528402;2. 广州城市职业学院,广东 广州 510405)
·实习与实训·
基于物联网的移动机器人综合实训平台设计
杨 亮1, 李文生1, 邓春健1, 杨伟钧2
(1. 电子科技大学 中山学院,广东 中山 528402;2. 广州城市职业学院,广东 广州 510405)

以提高电子信息类专业学生综合应用能力为目标,设计了基于物联网技术的移动机器人综合实训平台,该平台由移动机器人系统和手机控制端两部分组成,其中移动机器人系统能够完成自动避障、烟雾检测、红外线感应、视频捕获等功能,通过手机可以实现移动机器人的远程控制、视频监控。文章详细阐述了实训平台各功能模块的具体实现,并给出了相关功能验证结果。该平台综合了电子、自动化、机电、计算机等专业知识,既有具体专业技术的应用背景,又有较好的趣味性,通过综合实验案例的设计,将物联网、嵌入式系统、传感器、移动应用软件开发等专业知识点融入到具体生动的实训项目中,实践表明该平台有助于让学生更好地理解电子信息类专业知识并提高其综合应用能力。
移动机器人; 综合实训平台; 物联网; 嵌入式系统
0 引 言
大学电子信息类课程具有逻辑性强同时也相对晦涩难懂的特点,这给大学电子信息类的课堂教学提出了较大挑战[1],设计与专业知识联系紧密且拥有良好应用背景,并具有一定趣味性的实验是有效激发学生学习热情、将学生注意力吸引在课堂和实验室的有效方法。另一方面,随着嵌入式系统在通信、消费电子、医疗仪器、航天航空等领域的广泛应用[2-3],市场对于专业技术人员的要求也越来越高,要求掌握的专业技术所涉及的知识面越来越广,对于新兴的技术需求量也越来越大,例如移动设备应用软件开发技术、物联网技术等,如何设计具有较强的应用背景与综合性的实验已成为高等教育中需要解决的重要问题之一。
移动机器人是集自动控制、动态规划与决策、环境感知等多功能于一体的综合性系统[4],涉及计算机、电子、机械、人工智能等多门学科,反映了一个国家的智能化和自动化研究水平,是一个国家高科技实力的重要标志[5],另一方面,具有实时追踪、感知、监控功能的物联网机器人系统,在反恐、军事侦察、还有工业生产线等方面有非常广阔的发展空间[6],随着物联网技术的飞速发展,将机器人技术与物联网技术相结合,成为当前科学技术的发展趋势之一[7-8],同时机器人为创新素质教育提供了一个最佳的平台[9]。
本项目充分利用移动机器人涉及多学科且具有一定趣味性及综合性的特点,提出一种基于物联网技术的移动机器人综合实训平台建设方案,该实训平台综合了电子、自动化、机电、计算机等专业的知识,将物联网、嵌入式系统、传感器、移动应用软件开发等专业知识点融入到具体生动的实训项目中。
1 移动机器人综合实训平台总体设计
移动机器人综合实训平台主要由基于Android系统的智能控制终端及移动机器人系统组成,其中移动机器人采用四轮移动模式,包括3个子系统,分别是机器人控制子系统、机器人传感器子系统、机器人车体子系统。其整体系统框架图如图1所示。
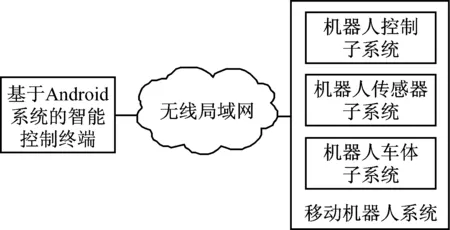
其中机器人车体子系统,主要是指移动机器人车体机械部分,包括电机、轮子(或履带)等。机器人传感器子系统主要完成视频、温度、距离等数据的采集,包含摄像头、超声波传感器、红外温度传感器等。机器人控制子系统主要实现机器人的接收与控制,包括ARM6410控制板及ARV单片机电机驱动板等部分。
为降低系统之间的耦合,采用ARM6410为移动机器人系统的主控芯片,运行嵌入式Linux操作系统,完成图像信息的采集及无线通信功能,而具体的电机控制、传感器信息采集则选用AVR Mega16单片机为控制芯片,其功能模块架构图如图2所示。
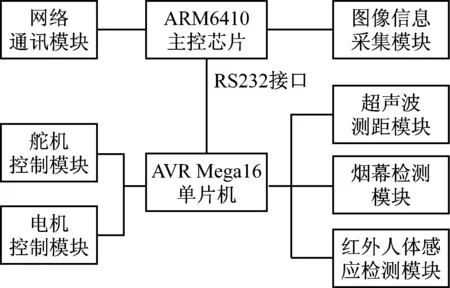
ARM6410与AVR Mega16单片机之间通过RS232接口进行控制信息的传递,ARM6410上面运行嵌入式Linux操作系统,负责驱动摄像头,完成图像信息的采集、编码,传输。基于Android系统的智能控制终端则可通过无线局域网完成对机器人的控制、查询功能,例如通过智能终端发送控制信息,可以达到控制移动机器人的目的,如机器人的移动、传感器信息的采集、舵机的远程控制等功能。
2 移动机器人综合实训平台设计
2.1 机器人车体子系统设计
机器人车体子系统是移动机器人综合实训平台的主体机构,也是承载移动机器人其他各子系统及完成各种动作的物理实体。为适应不同专业背景的个性化需求,开发了具有不同运动特点的机器人车体系统:
(1) 四轮驱动型移动机器人车体。这是较为常见的一种车体结构,如图3所示,采用4个电机分别控制4个轮子,通过控制4个轮子的速度及方向实现机器人的快速运动。
轮式机器人控制系统用途广泛、适应能力强,体积轻便小巧[10]。系统平台采用了 Linux,使得移动机器人的实时、幵放性能得到了很大的改善[11]。这种车体结构便于控制,车体内有更多空间,能够容纳诸如控制板、电池、电机、传感器等设备,甚至可将无线路由器部署在小车上,提供一个可以“移动”的WiFi网络。
(2) 履带型移动机器人车体。为了能够拥有更强的越障能力,我们设计了履带型移动机器人车体,利用高强度的铝合金进行加工并制成模型,拥有良好的散热排气孔设计,具有体积小、便于携带、续航时间长、越障能力突出等优点。(见图4)。
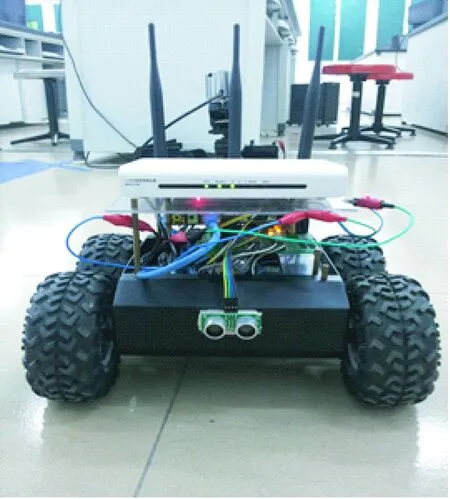
图3 四轮驱动移动机器人车体实物图
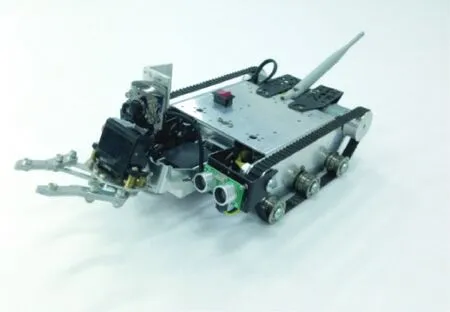
图4 履带型移动机器人车体实物图
2.2 机器人传感器子系统设计
通过灵活安装载传感器,实现与周围环境的交互。在传感器子系统中,为降低与机器人控制子系统的耦合程度,采用AVR meg16单片机为主控芯片,通过传感器采集包括距离、温度等环境信息,并通过RS232串口传输给机器人控制子系统。下面对各传感器各功能进行描述。
(1) 超声波测距模块。超声波测距模块主要是为了避免机器人在遇到障碍物时用户来不及控制而导致机器人碰壁的现象,防止硬件遭到碰撞受损,延迟机器人的使用寿命。开启超声波测距后用户可以通过修改其频率来改变检测距离。当在指定距离内发现障碍物,单片机随即发送该信息给上层系统,上层系统提示用户进行转向,若不进行转向机器人将停止行动。
(2) 烟幕检测模块。烟幕检测模块具有继电器控制输出;带电平检测信号输出可有效控制报警;供电副本直接用DC9V电池供电;感应灵敏度高,误报率极低。当烟雾检测传感器指示灯开始闪烁,继电器吸合,表明烟雾浓度已超过正常值,3秒左右指示灯开始闪烁,继电器吸合,当AVR Mega16单片机从I/O口读取到低电平,此时触发异常中断,即发出蜂鸣报警,并将危险信息通过RS232接口传给ARM6410主控芯片。
(3) 红外人体感应检测模块。人体感应是一种利用红外线、热释电原理感应温度变化信息的新技术,能自动准确的识别、检测和感应包括人体在内的有热度变化的信息,它不依赖光线,哪怕是在漆黑的环境里,也能稳定可靠的工作。利用该红外人体感应检测模块完成对人类活动的检测功能,该功能可以用于救灾场景中,如在一些危险的环境中,该机器人可为搜救被困人员提供参考信息。
在传感器子系统中,可以适时引入物联网中感知层的概念,设计与物联网等专业相关的实验,如温度、湿度、甲烷气体浓度等信息的采集实验、单片机编程等实验,并引导学生思考,如何实现物与物之间的通讯与联系。
2.3 机器人控制子系统设计
机器人控制子系统相当于机器人的“大脑”,采用ARM6410作为主控芯片,上面运行嵌入式Linux操作系统,主要完成控制命令的解析与传递、图像信息的采集、网络通讯等功能。
(1) 图像信息采集模块。为实现远程监控功能,首先借助Linux平台下的驱动正确识别并驱动usb摄像头,利用Linux操作系统自带的v4l2接口完成图像信息的采集,并移植开源Jrtplib库实现图像信息的RTP发送与接收功能。
(2) 网络通讯模块。考虑到平时实验的具体情况,本平台采用WiFi网络作为主要的通讯媒介,同时也提供RJ45接口作为备用方案。为达到灵活的硬件配置,采用usb网卡,并设置脚本,自动完成WiFi网络的注册登录。
(3) 电机控制模块。为实现真正的四轮驱动,本平台采用AVR Mega16单片机控制经由L298P芯片控制四个电机,以达到分别驱动四个轮子的目的。软件上,为实现电机速度的控制,采用定时器中断方式输出PWM,通过调整占空比达到控制电机速度的作用。
(4) 舵机控制模块。舵机相当于机器人的“肌肉”,可以完成物体的夹取等功能。本平台采用AVR Mega16单片机来控制舵机的转动,控制原理类似电机控制模块,也是通过输出PWM波,调整占空比控制电机的转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到AVR单片机控制电路板,进行反馈,然后AVR单片机控制板根据所在位置决定电机的转动方向和速度,从而达到目标停止。
另外,还可加入usb 3G上网卡,引导学生将3G上网卡移植到嵌入式Linux平台,开展Linux驱动程序编写、移植等相关的教学实践。在网络方面,可以适时引入Zigbee网络,Zigbee是一种便宜的、低功耗的近距离无线组网技术。在工业控制、家庭智能化以及无线传感器网络等方面有广泛的应用前景[12-13],引导学生学习新技术,有利于培养学生的自学及自学能力。
2.4 基于Android系统的智能控制终端设计
为实现良好的人机接口,远程控制机器人的移动、信息采集、控制等功能,我们基于Android平台设计了一个智能控制终端软件,该软件能够运行在Android系统下,能够运行在各种Android设备上,如Android智能手机、平板电脑等,其使用界面,如图5所示。

图5 远程控制终端使用界面
通过该控制界面,可以选择打开或关闭人体感应检测及超声波检测等功能,并实现远程控制机器人的移动速度及方向,实时查看摄像头捕获的图像信息等功能。
该部分可引导学生做移动应用开发等方面的扩展实验,如通过智能手机自带的陀螺仪、加速度计等传感器检测实现机器人的远程动作控制,例如,将智能手机倾斜一定的角度,可以控制机器人移动的速度与方向,该部分实现能够很好的将移动应用开发、网络协议开发、软件工程等课程内容融合在一起,通过实验的方式锻炼、提高学生对知识的综合应用能力。
3 结 语
大学电子信息类课程具有较强的理论性和专业性,综合性很强,内容相对抽象,因此设计与知识点联系紧密,又具有良好的应用背景与趣味性的实验就显得尤为重要,再有在针对具体实验内容进行设计时,除
了保证学生必须掌握的实验科目外,尽量减少对于实验内容的限制,突出设计方法、设计思路的养成[14]。
实践是创新的基础,鼓励创新和重视实践是创新教育的关键[15]。本文借用了移动机器人的趣味性与综合性,将其引入综合实训平台的建设中,提出了一种基于物联网技术的移动机器人综合实训平台的建设方案,该综合实训平台目前已被应用于本院“嵌入式网络协议分析有应用”、“嵌入式软件开发”、“移动设备应用软件开发”等课程的实验及课程设计中。试用表明,该平台不但有利于提高学生基础知识的理解,并有效激发了学生的学习热情,提高了学生的动手能力,同时,也为学生完成创新性综合实验创造了条件。
[1] 杨 亮,邓春健,梁瑞仕,等.一种情景化游戏设计方法在大学电子信息类课程教学中的应用[J]. 计算机教育,2014(13):87-90.
[2] 吕少中,张丽杰.开放模式下嵌入式系统实验教学的探索与实践[J]. 科技信息, 2009(5):169-170.
[3] 谭大为,张有光,刘晚春.基于ARM 32位高速嵌入式微控制器[M]. 北京:电子工业出版社,2012:1-4.
[4] 黄永志,陈卫东.两轮移动机器人控制系统的设计与实现[J].机器人,2004, 3(1): 40-44.
[5] 付根平,仿人步行机器人步态控制[D].广州:广东工业大学,2013.
[6] 章小兵,宋爱国.地面移动机器人研究现状及发展趋势[J].机器人技术与应用,2006, 4(2):19-23.
[7] 王田苗.嵌入式系统设计与实例开发——基于ARM微处理器与uCOS-II实时操作系统[M].北京:淸华大学出版社,2010:16-20.
[8] 孙宏宇.基于ARM的轮式机器人控制系统设计[D].大连:大连理工大学,2013.
[9] 雷静桃, 刘 亮, 张海洪. “机器人学” 课程教学改革与实践[J]. 实验室研究与探索, 2013, 32(5): 179-182.
[10] 胥 静.嵌入式系统设计开发实例详——基于ARM的应用[M].北京:北京航空航天大学出版社,2010: 13-21.
[11] 杜奍雷.ARM体系结构与编程[M].北京:淸华大学出版社,2007: 68-71.
[12] 董海涛.基于Zigbee的无线传感器网络的设计与实现[D].安徽:中国科学技术大学,2007:1-5.
[13] 齐 恒.基于物联网的物流企业智能仓储管理系统设计[J].实验技术与管理,2013,30(12):133-135.
[14] 谭大为,开放的嵌入式系统实验平台设计[J].实验技术与管理,2013,30(12):141-145.
[15] 雷静桃, 刘 亮, 张海洪. “机器人学” 课程教学改革与实践[J]. 实验室研究与探索, 2013, 32(5): 179-182.
The Design of Mobile Robot Experimental Platform Based on Internet of Things
YANGLiang1,LIWen-sheng1,DENGChun-jian1,YANGWei-jun2
(1. Department of Computer Science, University of Electronic Science and Technology of China, Zhongshan 528402,China; 2. Department of Electromechanical Engineering, Guangzhou City Polytechnic, Guangzhou 510405, China)
In order to improve the electronic and information engineering students' application ability, a mobile robot experimental platform based on internet of things has been designed. This platform consists of two parts: mobile robot system and phone client. The mobile robot system has the features of obstacle avoidance, gas detection, infrared perception and video capture, and can be controlled remotely via phone clients. A detailed explanation about the implementation of this platform has been provided and the related experiment result is given. This platform has covered almost all information technology related subjects including electronics, automation, mechanical electronic engineering and computer science. And the professional knowledge can be merged into the experiment via comprehensive experiments. The practice has proved that this platform can help students to have a better understanding about techniques of learning and using professional knowledge.
mobile robot; experimental platform; internet of things; embedded system
2014-04-21
全国教育信息技术研究“十二五”规划2013年度课题及子课题(136240994,136240994-0002);广东省教育科研“十二五”规划2012年度课题(2012JK004);广东省高等学校教学质量与教学改革工程项目;广东高校优秀青年创新人才培养计划(2013LYM0104);广州市教育科学“十二五”规划2012年度课题(12A169);中山市科技计划项目(2013A3FC0278);电子科技大学中山学院质量工程项目(ZLGC2012JY04,ZLGC2012JY01)
杨 亮(1980-),男,江西婺源人,硕士,讲师,研究方向:智能机器人系统与技术。
Tel.:18688104346;E-mail: alex.8341@qq.com
G 642;TP 242
A
1006-7167(2015)03-0233-04